
一种绝对式伺服驱动器控制方法.pdf

书生****22


1/5

2/5

3/5

4/5

5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种绝对式伺服驱动器控制方法.pdf
本发明涉及伺服驱动器技术领域,且公开了一种绝对式伺服驱动器控制方法,包括控制模块、信号输入模块、信号输出模块、功能模块和参数设定模块,所述控制模块包括位置控制模块和速度控制模块,所述信号输入模块包括控制信号模块、位置信号模块、速度信号模块和输入接口模块,所述信号输出模块包括输出接口模块和编码器输出模块,所述功能模块包括制动功能模块、电子齿轮模块、保护功能模块和自动加/减速模块,所述参数设定模块包括键盘输入模块和显示模块。该绝对式伺服驱动器控制方法,能够实现对伺服驱动器的便捷操控和参数设置,同时伺服驱动器的
伺服驱动器的动态制动控制方法.pdf
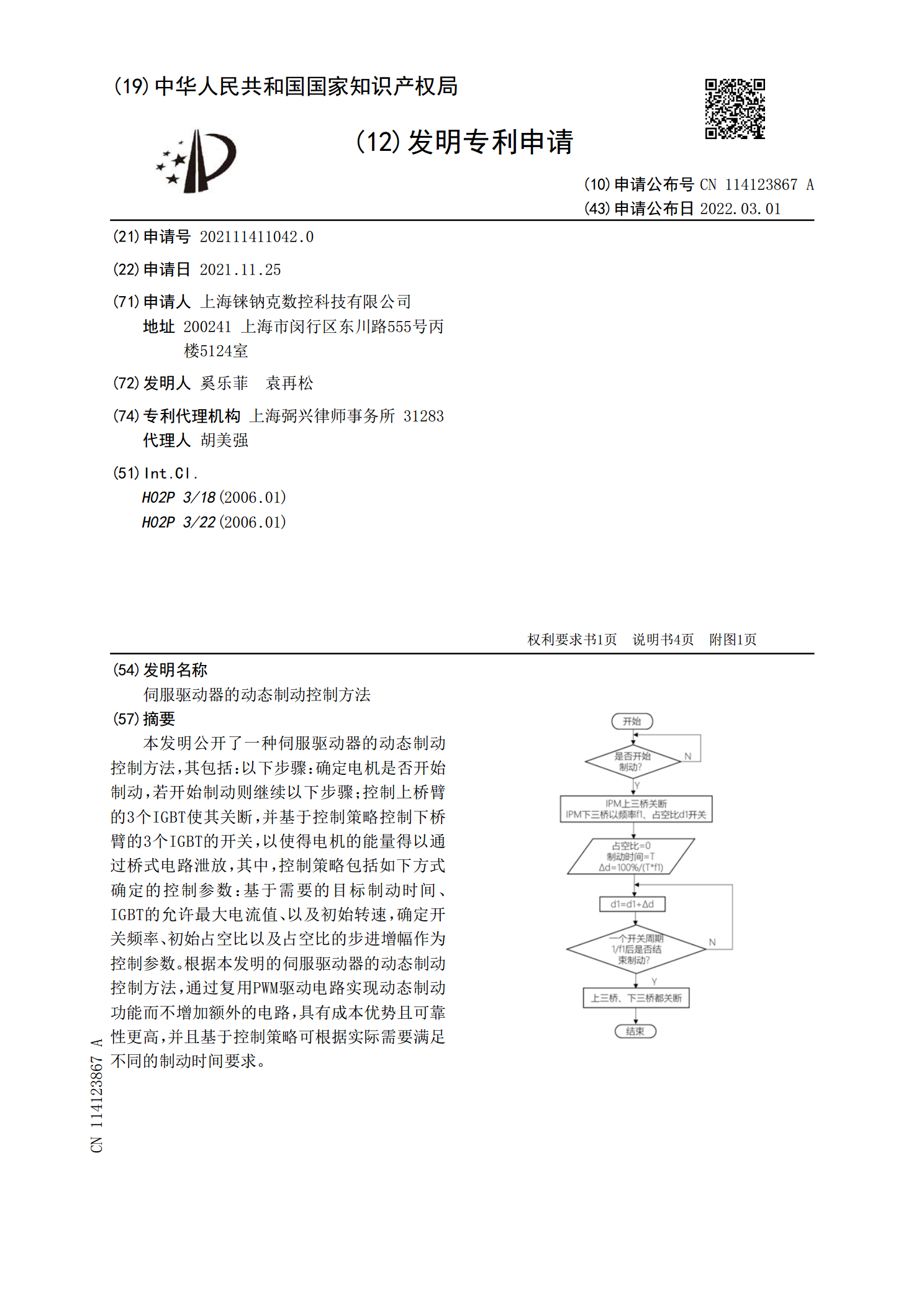
本发明公开了一种伺服驱动器的动态制动控制方法,其包括:以下步骤:确定电机是否开始制动,若开始制动则继续以下步骤;控制上桥臂的3个IGBT使其关断,并基于控制策略控制下桥臂的3个IGBT的开关,以使得电机的能量得以通过桥式电路泄放,其中,控制策略包括如下方式确定的控制参数:基于需要的目标制动时间、IGBT的允许最大电流值、以及初始转速,确定开关频率、初始占空比以及占空比的步进增幅作为控制参数。根据本发明的伺服驱动器的动态制动控制方法,通过复用PWM驱动电路实现动态制动功能而不增加额外的电路,具有成本优势且可
一种伺服驱动器开关电源及其伺服驱动器.pdf
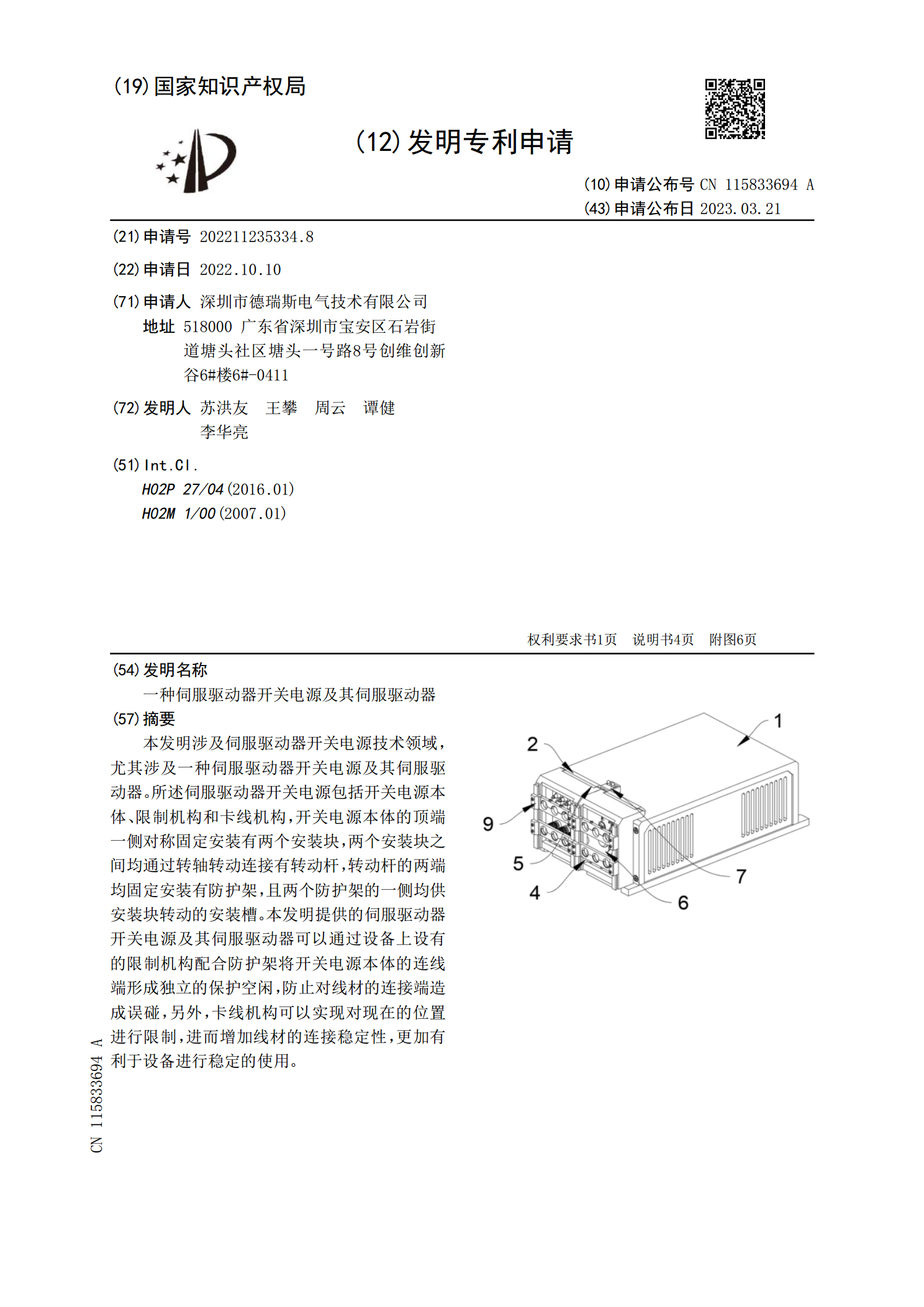
本发明涉及伺服驱动器开关电源技术领域,尤其涉及一种伺服驱动器开关电源及其伺服驱动器。所述伺服驱动器开关电源包括开关电源本体、限制机构和卡线机构,开关电源本体的顶端一侧对称固定安装有两个安装块,两个安装块之间均通过转轴转动连接有转动杆,转动杆的两端均固定安装有防护架,且两个防护架的一侧均供安装块转动的安装槽。本发明提供的伺服驱动器开关电源及其伺服驱动器可以通过设备上设有的限制机构配合防护架将开关电源本体的连线端形成独立的保护空闲,防止对线材的连接端造成误碰,另外,卡线机构可以实现对现在的位置进行限制,进而增
一种多轴伺服驱动器控制装置.pdf
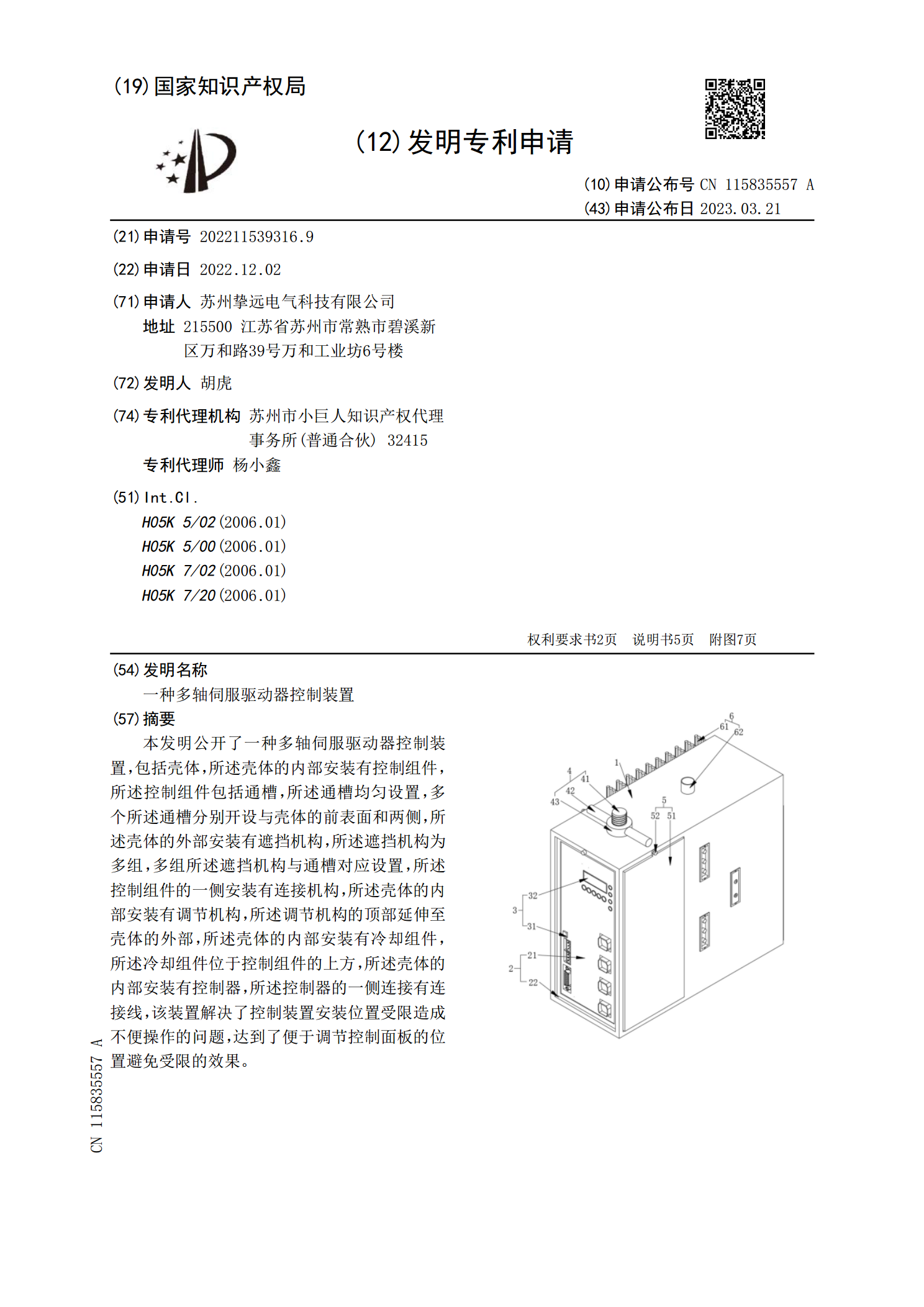
本发明公开了一种多轴伺服驱动器控制装置,包括壳体,所述壳体的内部安装有控制组件,所述控制组件包括通槽,所述通槽均匀设置,多个所述通槽分别开设与壳体的前表面和两侧,所述壳体的外部安装有遮挡机构,所述遮挡机构为多组,多组所述遮挡机构与通槽对应设置,所述控制组件的一侧安装有连接机构,所述壳体的内部安装有调节机构,所述调节机构的顶部延伸至壳体的外部,所述壳体的内部安装有冷却组件,所述冷却组件位于控制组件的上方,所述壳体的内部安装有控制器,所述控制器的一侧连接有连接线,该装置解决了控制装置安装位置受限造成不便操作的

自适应式驱动器、调节方法和伺服驱动系统.pdf
本发明涉及机器人的技术领域,公开了自适应式驱动器、调节方法和伺服驱动系统,包括用于与外部多个电机通信的接口,还包括电源模组和多个驱动电路模组;各所述驱动电路模组连接于所述接口,独立实现特定数量所述电机的驱动控制;所述电源模组连接于各所述驱动电路模组,并设有用于获取所述驱动电路模组工作状态的检测模块和用于调整各所述驱动电路模组供电的控制模块。本发明不仅减少了零件数量,而且降低了购买者的学习和采购成本,用户只需要根据需要自行购买组合即可直接使用。