
伺服驱动器的动态制动控制方法.pdf

纪阳****公主


1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
伺服驱动器的动态制动控制方法.pdf
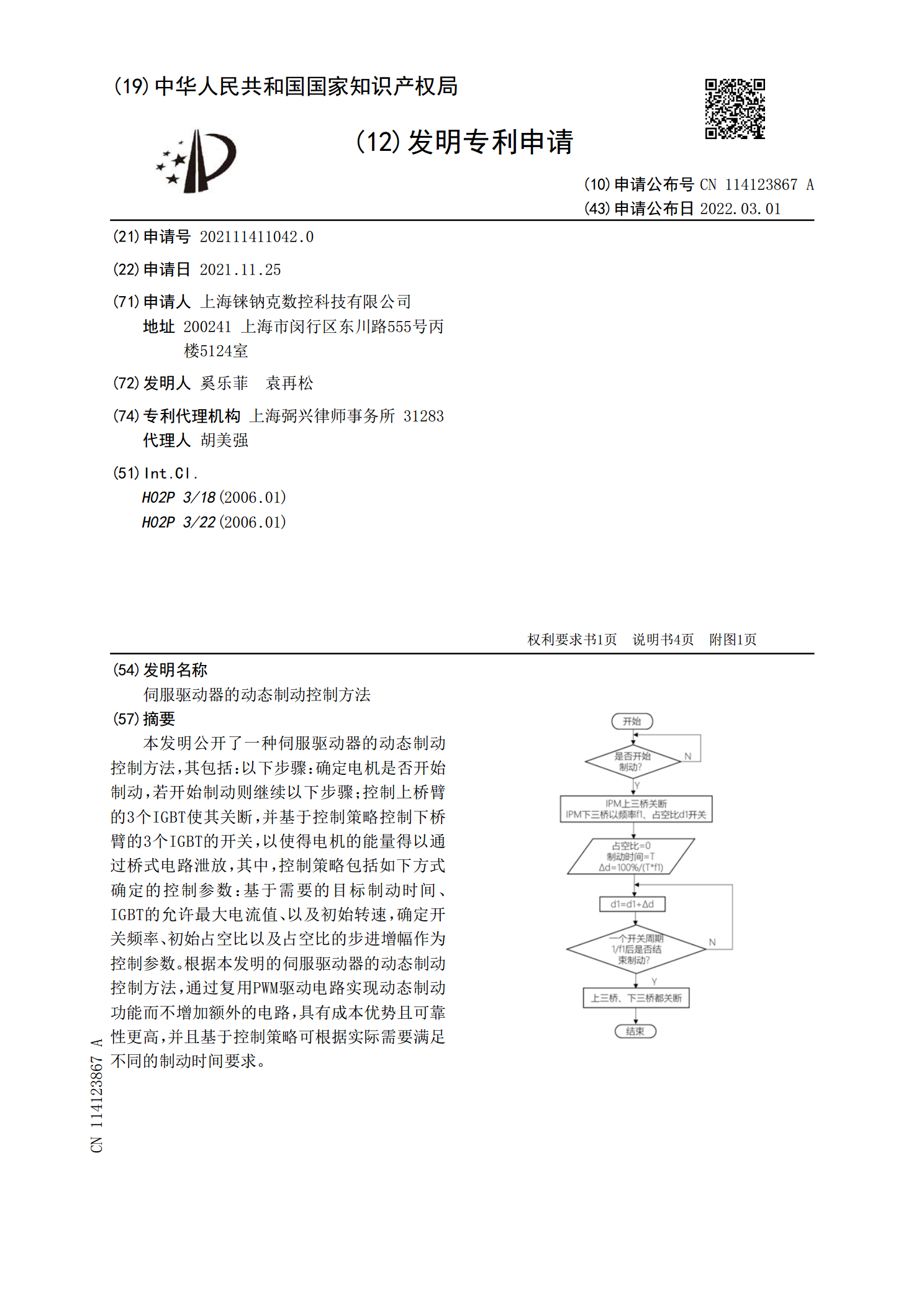
本发明公开了一种伺服驱动器的动态制动控制方法,其包括:以下步骤:确定电机是否开始制动,若开始制动则继续以下步骤;控制上桥臂的3个IGBT使其关断,并基于控制策略控制下桥臂的3个IGBT的开关,以使得电机的能量得以通过桥式电路泄放,其中,控制策略包括如下方式确定的控制参数:基于需要的目标制动时间、IGBT的允许最大电流值、以及初始转速,确定开关频率、初始占空比以及占空比的步进增幅作为控制参数。根据本发明的伺服驱动器的动态制动控制方法,通过复用PWM驱动电路实现动态制动功能而不增加额外的电路,具有成本优势且可
伺服驱动器的S曲线生成方法、装置和伺服驱动器.pdf
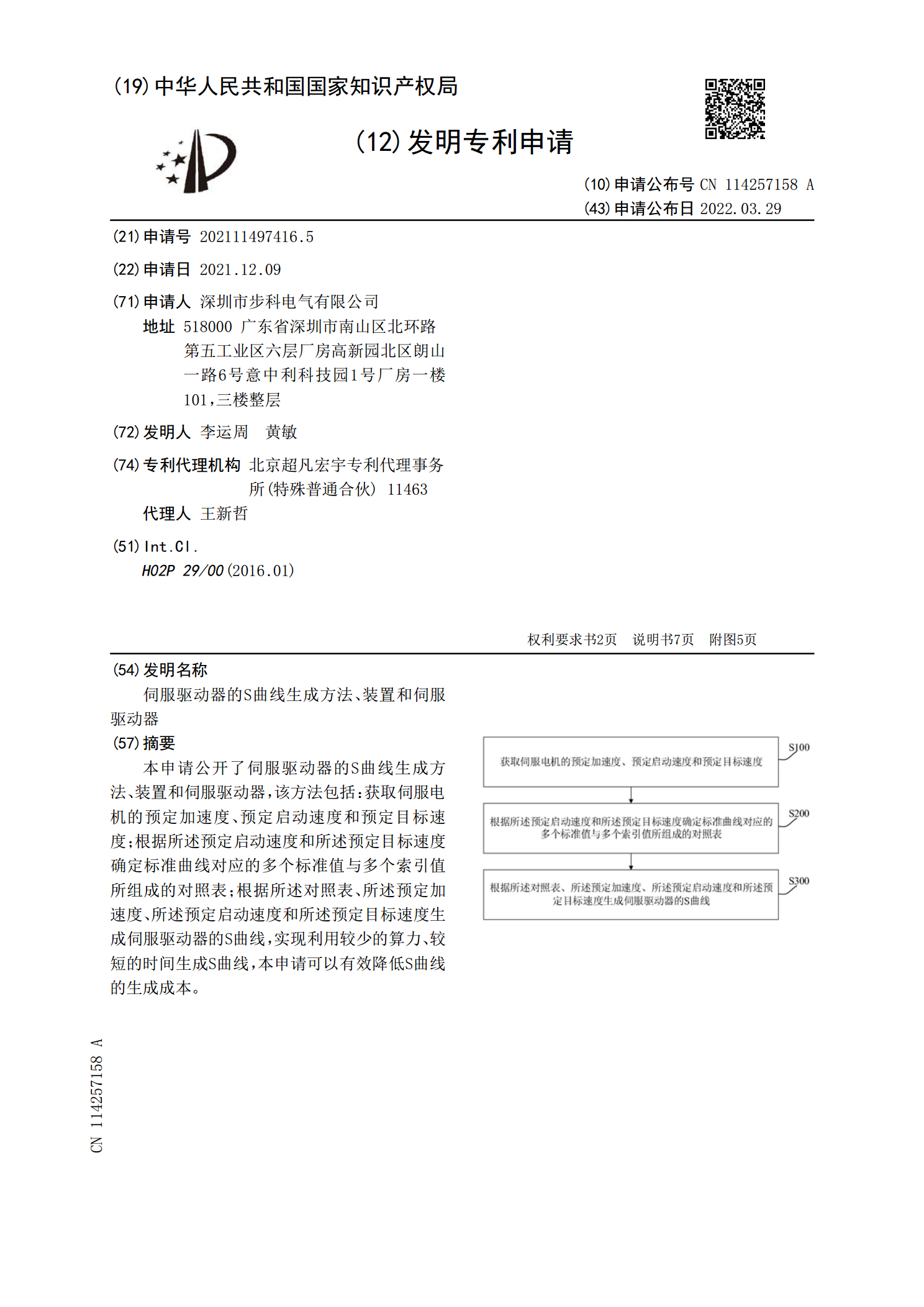
本申请公开了伺服驱动器的S曲线生成方法、装置和伺服驱动器,该方法包括:获取伺服电机的预定加速度、预定启动速度和预定目标速度;根据所述预定启动速度和所述预定目标速度确定标准曲线对应的多个标准值与多个索引值所组成的对照表;根据所述对照表、所述预定加速度、所述预定启动速度和所述预定目标速度生成伺服驱动器的S曲线,实现利用较少的算力、较短的时间生成S曲线,本申请可以有效降低S曲线的生成成本。

一种绝对式伺服驱动器控制方法.pdf
本发明涉及伺服驱动器技术领域,且公开了一种绝对式伺服驱动器控制方法,包括控制模块、信号输入模块、信号输出模块、功能模块和参数设定模块,所述控制模块包括位置控制模块和速度控制模块,所述信号输入模块包括控制信号模块、位置信号模块、速度信号模块和输入接口模块,所述信号输出模块包括输出接口模块和编码器输出模块,所述功能模块包括制动功能模块、电子齿轮模块、保护功能模块和自动加/减速模块,所述参数设定模块包括键盘输入模块和显示模块。该绝对式伺服驱动器控制方法,能够实现对伺服驱动器的便捷操控和参数设置,同时伺服驱动器的

伺服驱动器超大齿轮比驱动控制方法.pdf
本发明公开了伺服驱动器超大齿轮比驱动控制方法,包括:在采样周期时间T内,对伺服驱动器的单极指令脉冲数量C进行采集;根据设定电子齿轮比G及单极指令脉冲数量C获取电机位置目标值M;根据电机位置目标值M及采样周期时间T获取齿轮比的脉冲驱动时间;伺服驱动器根据齿轮比的脉冲驱动时间进行插补驱动输出。从而解决了现有伺服驱动器超大齿轮比驱动控制过程中转速会不均匀,电机噪音大的问题。因此在超大齿比工况下使电机运行平稳,定位准确,消除电机噪音,将有助于提高伺服驱动器控制性能,扩大驱动器应用范围。

辅助制动动态控制方法.pdf
本发明涉及辅助制动动态控制方法,包含步骤:采集档位信息、整车质量、整车车速、坡度、目标车速、辅助制动手柄状态、防抱死制动系统状态、外部取力系统状态、发动机转速和油门开度;根据车速闭环,计算得到辅助制动需求负扭矩;获取辅助制动所需要的需求减速度;根据需求减速度,计算得到辅助制动需求负扭矩;根据整车质量和整车车速,计算得到辅助制动需求负扭矩;输出辅助制动需求负扭矩,即为本发明动态控制方法的最终输出结果。本发明提高了驾驶员操控和辅助制动感受;可以方便主机厂适配不同辅助制动手柄档位形式。