
单空间点云配准方法及装置.pdf

玉军****la

1/10
2/10
3/10

4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

单空间点云配准方法及装置.pdf
本发明提供一种单空间点云配准方法及装置,涉及点云配准领域。方法包括:从单空间获取多片点云,任取两片作为源点云和目标点云;对两片点云旋转得到高度方向垂直于地面且轮廓边平行于XOY平面坐标系中任一坐标轴的两片点云;利用两种点云数据中表示门窗的点信息进行方位匹配,获取三维点信息准确匹配的门窗对并对目标点云再次旋转;计算源点云中心到目标点云中心的矢量,根据源点云中心、目标点云中心以及矢量的关系获取重合源点云和目标点云;根据迭代最近点算法对重合源点云和目标点云再配准。本发明实施例的单空间点云配准方法及装置能够对单空

点云配准方法.ppt
ABriefIntroductionOfPointCloudRegistrationMethodPointCloudRegistrationMethod1.PointCloudRegistrationWithTargetControl1.PointCloudRegistrationWithTargetControl1.PointCloudRegistrationWithTargetControl1.PointCloudRegistrationWithTargetControl1.PointCloudReg
点云配准方法、装置、设备、介质和自动驾驶车辆.pdf
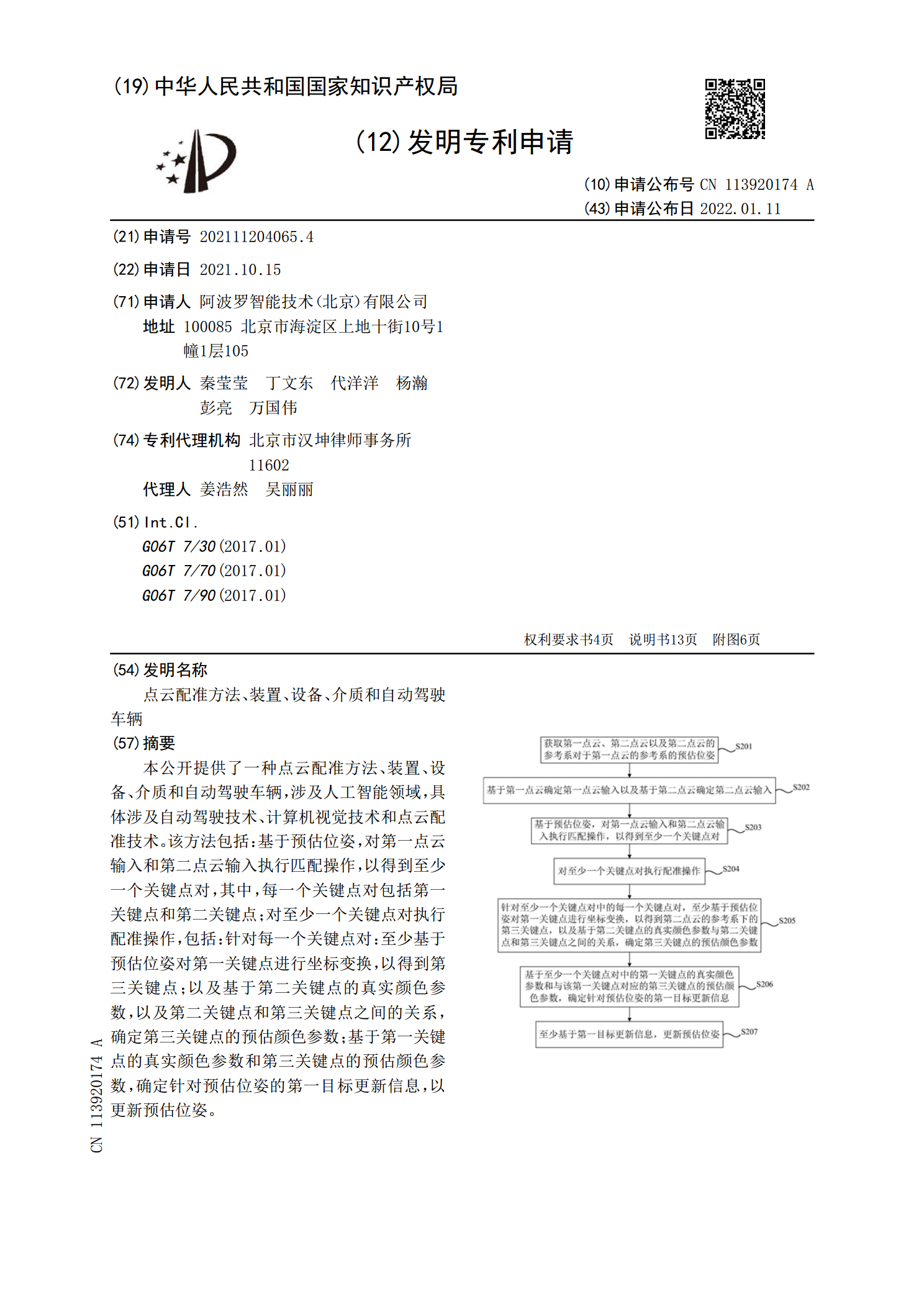
本公开提供了一种点云配准方法、装置、设备、介质和自动驾驶车辆,涉及人工智能领域,具体涉及自动驾驶技术、计算机视觉技术和点云配准技术。该方法包括:基于预估位姿,对第一点云输入和第二点云输入执行匹配操作,以得到至少一个关键点对,其中,每一个关键点对包括第一关键点和第二关键点;对至少一个关键点对执行配准操作,包括:针对每一个关键点对:至少基于预估位姿对第一关键点进行坐标变换,以得到第三关键点;以及基于第二关键点的真实颜色参数,以及第二关键点和第三关键点之间的关系,确定第三关键点的预估颜色参数;基于第一关键点的真

一种激光点云配准方法.pdf
本发明提供了一种激光点云配准方法,通过对两帧待配准的源三维点云和目标三维点云分别进行降采样并分割出非地面点云后,提取对应源三维点云和目标三维点云的局部特征的源局部特征和目标局部特征并进行特征匹配,进而基于匹配结果估计所述源三维点云相对于所述目标三维点云的位姿变换,得到源三维点云和目标三维点云之间的位姿变换矩阵完成对源三维点云和目标三维点云的配准。基于本发明提供的激光点云配准方法,通过对源三维点云和目标三维点云进行降采样,可以在减小计算压力的同时保留原始点云的信息,提高后续特征的稳定性。并且,基于非地面点云
基于ICP算法的点云文件配准方法、装置及存储介质.pdf
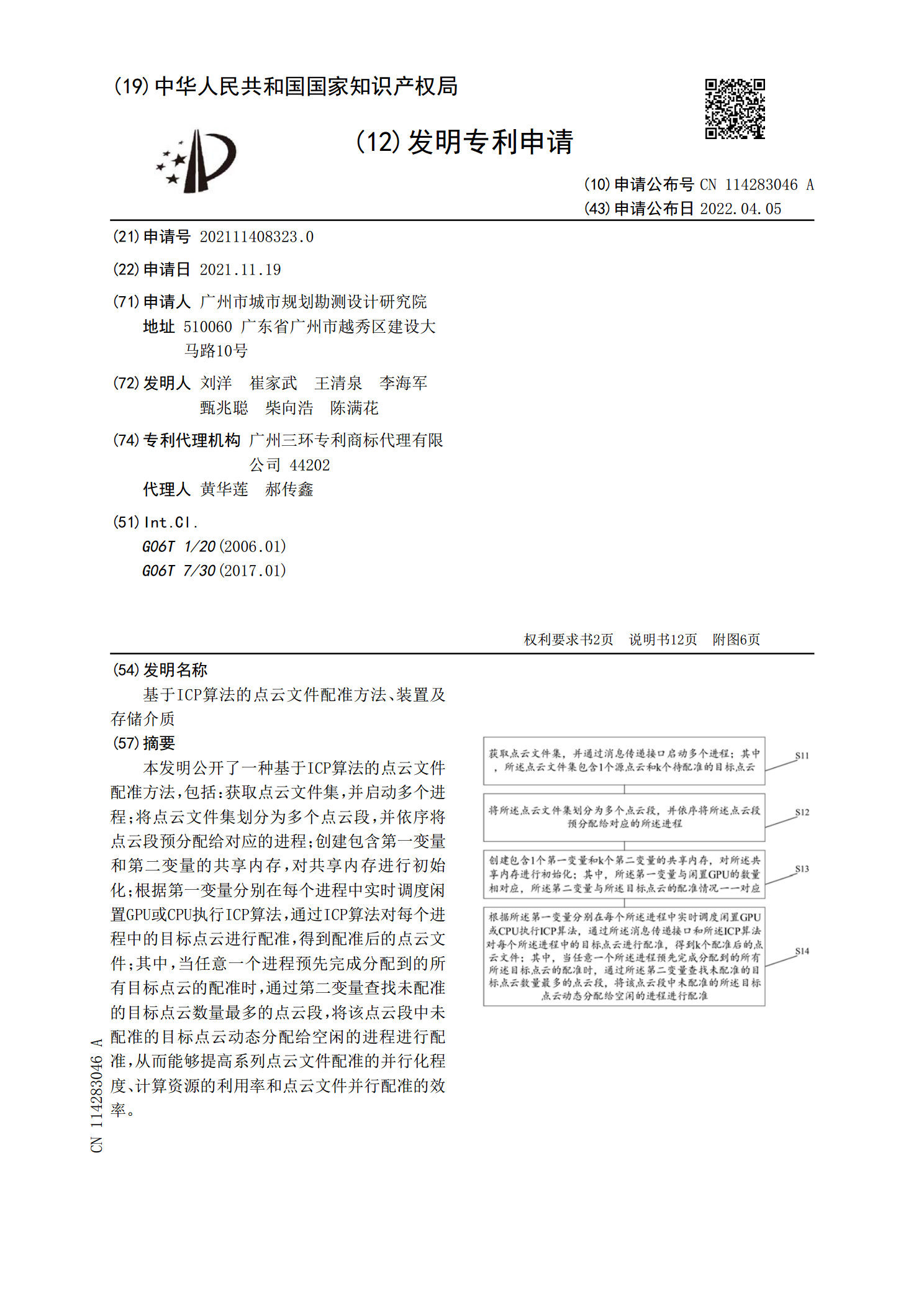
本发明公开了一种基于ICP算法的点云文件配准方法,包括:获取点云文件集,并启动多个进程;将点云文件集划分为多个点云段,并依序将点云段预分配给对应的进程;创建包含第一变量和第二变量的共享内存,对共享内存进行初始化;根据第一变量分别在每个进程中实时调度闲置GPU或CPU执行ICP算法,通过ICP算法对每个进程中的目标点云进行配准,得到配准后的点云文件;其中,当任意一个进程预先完成分配到的所有目标点云的配准时,通过第二变量查找未配准的目标点云数量最多的点云段,将该点云段中未配准的目标点云动态分配给空闲的进程进行