
点云配准方法.ppt

胜利****实阿

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

点云配准方法.ppt
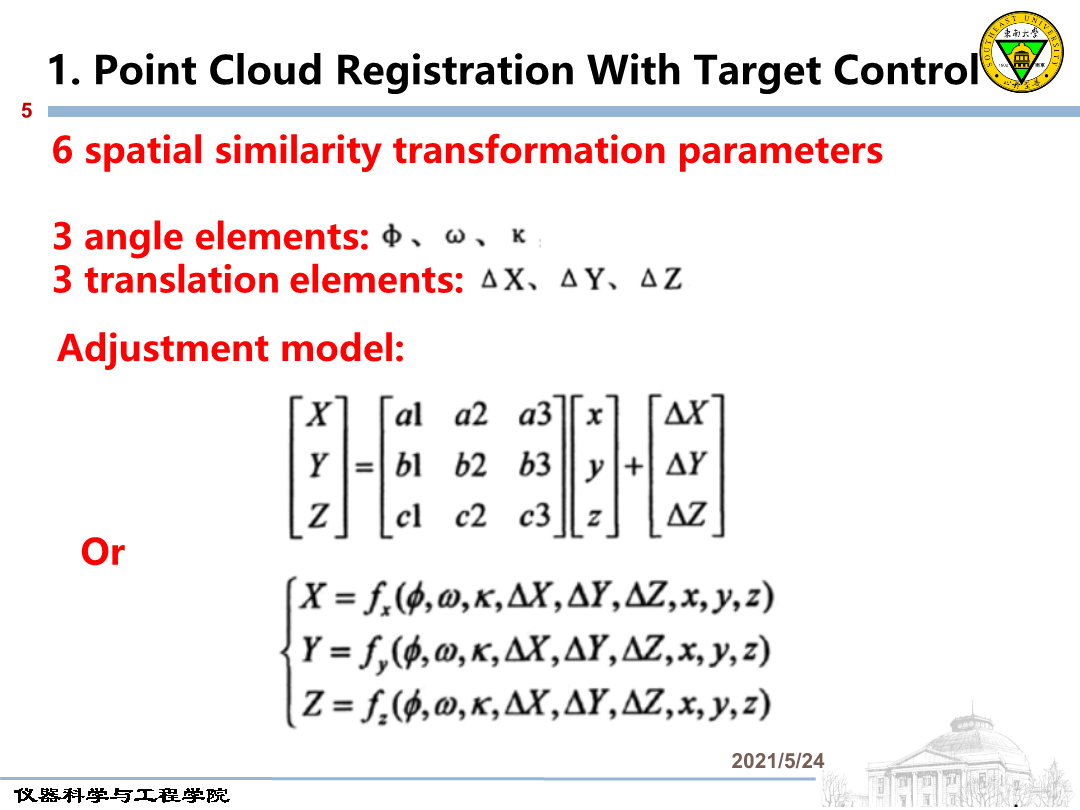
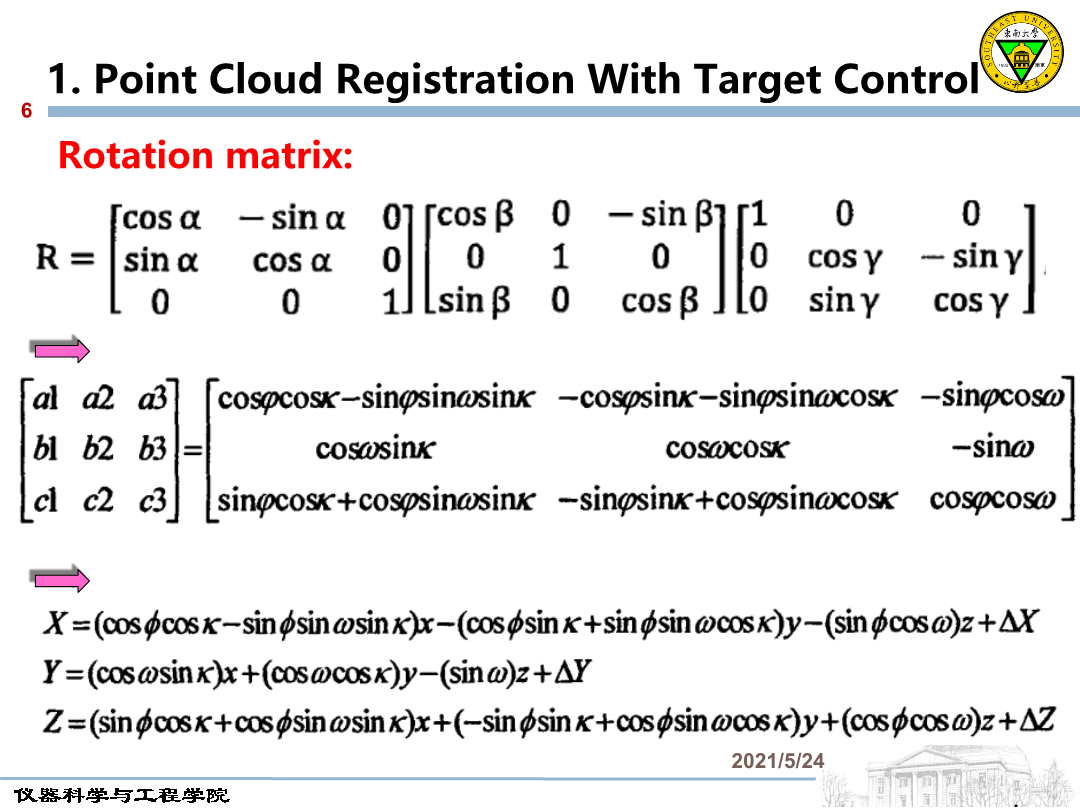
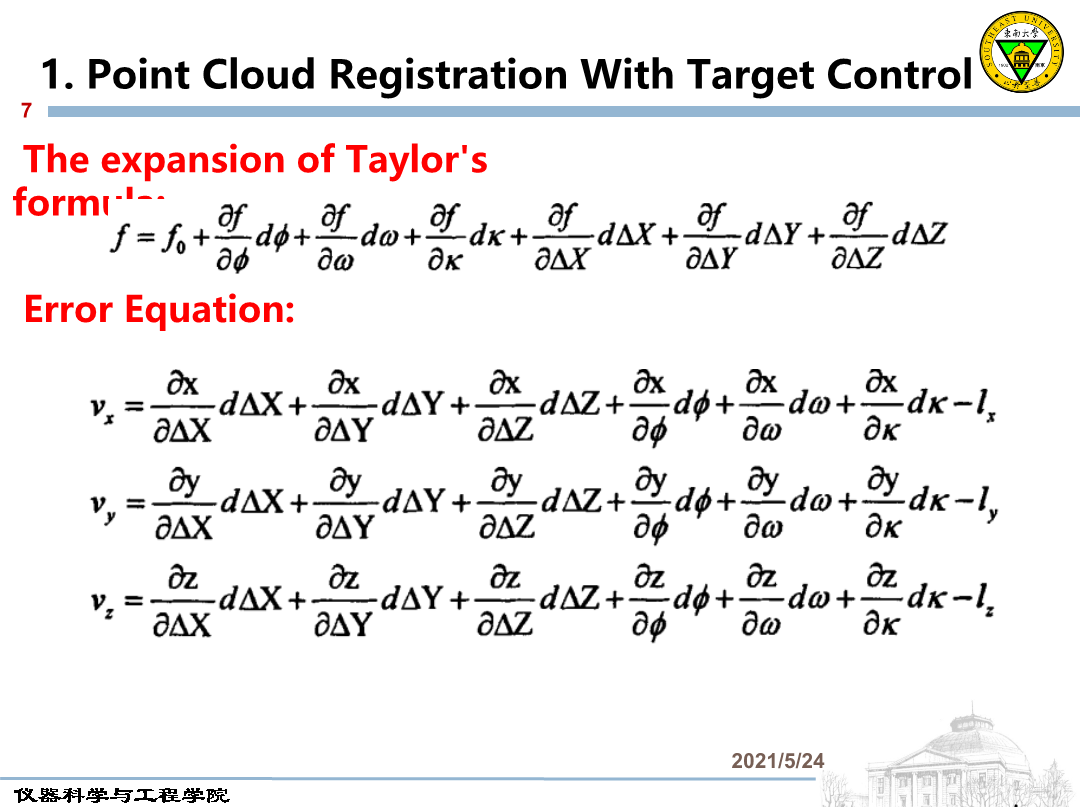
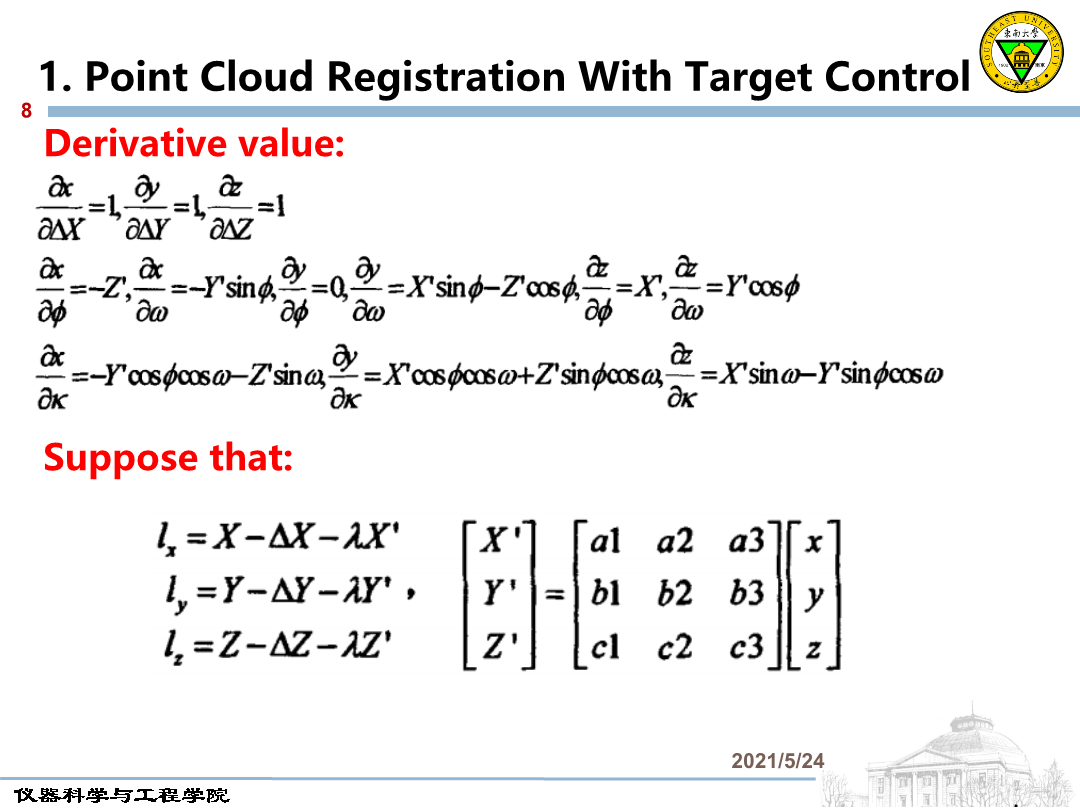
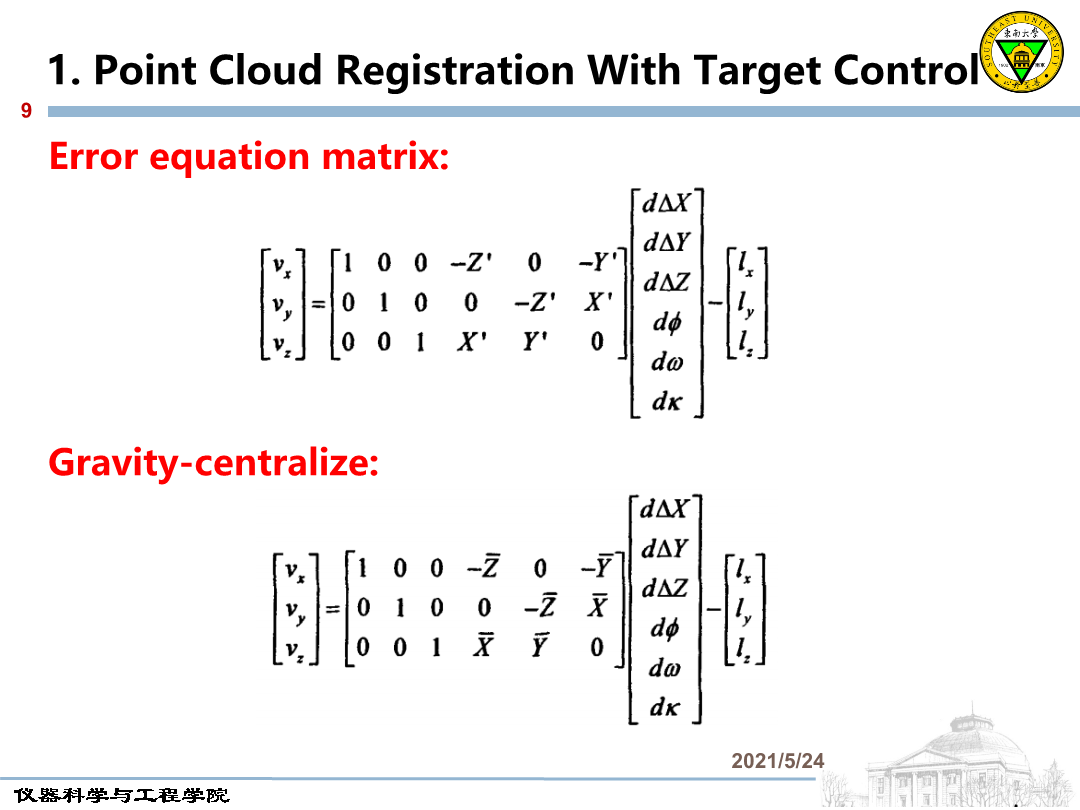
ABriefIntroductionOfPointCloudRegistrationMethodPointCloudRegistrationMethod1.PointCloudRegistrationWithTargetControl1.PointCloudRegistrationWithTargetControl1.PointCloudRegistrationWithTargetControl1.PointCloudRegistrationWithTargetControl1.PointCloudReg

一种激光点云配准方法.pdf
本发明提供了一种激光点云配准方法,通过对两帧待配准的源三维点云和目标三维点云分别进行降采样并分割出非地面点云后,提取对应源三维点云和目标三维点云的局部特征的源局部特征和目标局部特征并进行特征匹配,进而基于匹配结果估计所述源三维点云相对于所述目标三维点云的位姿变换,得到源三维点云和目标三维点云之间的位姿变换矩阵完成对源三维点云和目标三维点云的配准。基于本发明提供的激光点云配准方法,通过对源三维点云和目标三维点云进行降采样,可以在减小计算压力的同时保留原始点云的信息,提高后续特征的稳定性。并且,基于非地面点云

单空间点云配准方法及装置.pdf
本发明提供一种单空间点云配准方法及装置,涉及点云配准领域。方法包括:从单空间获取多片点云,任取两片作为源点云和目标点云;对两片点云旋转得到高度方向垂直于地面且轮廓边平行于XOY平面坐标系中任一坐标轴的两片点云;利用两种点云数据中表示门窗的点信息进行方位匹配,获取三维点信息准确匹配的门窗对并对目标点云再次旋转;计算源点云中心到目标点云中心的矢量,根据源点云中心、目标点云中心以及矢量的关系获取重合源点云和目标点云;根据迭代最近点算法对重合源点云和目标点云再配准。本发明实施例的单空间点云配准方法及装置能够对单空
密集点云模型快速精确配准方法.pdf
本发明公开了一种密集点云模型快速精确配准方法,通过对齐的方法实现涡轮叶片密集点云模型和CAD模型的初始配准;对得到的初始配准点云数据进行适当的简化,计算SVD_ICP算法中每步迭代的旋转矩阵和平移矩阵,最终采用SVD_ICP算法实现控制点集{P}和CAD模型的精确配准。本发明在实现点云模型与CAD模型预配准的前提下,通过对密集点云数据进行简化,以简化后的数据作为配准控制点集,在SVD_ICP算法的基础上计算求得总的旋转矩阵和平移矩阵,然后把求得的总变换矩阵应用于简化前的原始密集点云,实现其与CAD模型的快
一种非刚性点云配准方法.pdf
本发明公开了一种非刚性点云配准方法,涉及三维重建技术领域,包括以下步骤:对采集的非刚性点云的数据点云和参考点云分别进行标准化处理;计算数据点云的局部线性嵌入权重矩阵L;根据矩阵L,计算数据点云的矩阵M;计算数据点云的格拉姆矩阵G;以参考点云为基准,计算数据点云的对应矩阵P;基于矩阵G、矩阵M和矩阵P,利用L‑M算法,迭代计算非刚性变换系数矩阵W;根据迭代次数,更新非刚性变换系数矩阵W中的λ和σ