
一种激光点云配准方法.pdf

Ja****20


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共24页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种激光点云配准方法.pdf
本发明提供了一种激光点云配准方法,通过对两帧待配准的源三维点云和目标三维点云分别进行降采样并分割出非地面点云后,提取对应源三维点云和目标三维点云的局部特征的源局部特征和目标局部特征并进行特征匹配,进而基于匹配结果估计所述源三维点云相对于所述目标三维点云的位姿变换,得到源三维点云和目标三维点云之间的位姿变换矩阵完成对源三维点云和目标三维点云的配准。基于本发明提供的激光点云配准方法,通过对源三维点云和目标三维点云进行降采样,可以在减小计算压力的同时保留原始点云的信息,提高后续特征的稳定性。并且,基于非地面点云

一种基于激光扫描的点云配准方法.pdf
本发明属于三维重建技术领域,具体涉及一种基于激光扫描的点云配准方法。本发明通过体素滤波实现扫描点云数据的精简,减少数据运算量。在点云特征点提取过程中,利用区域分块和法线差异特征进特征点提取,使得提取的特征点可以很好保留点云的几何特征,并在点云模型上分布较为均匀。在点云精配准过程中,利用特征点进行配准,提高点云搜索效率,加快配准速度。针对激光扫描得到得点云数据同一位置点的偏移问题,利用点到面的迭代最近邻点算法进行配准,通过点云到对应点切平面的最小距离构建点对面的匹配误差函数。并且通过法向量夹角约束剔除错误点

点云配准方法.ppt
ABriefIntroductionOfPointCloudRegistrationMethodPointCloudRegistrationMethod1.PointCloudRegistrationWithTargetControl1.PointCloudRegistrationWithTargetControl1.PointCloudRegistrationWithTargetControl1.PointCloudRegistrationWithTargetControl1.PointCloudReg

一种机载激光点云与航空影像的自动配准方法.pdf
一种机载激光点云与航空影像的自动配准方法。在不需要对激光点云进行内插的情况下,直接从点云中提取建筑物轮廓线,通过轮廓线规则化获得作为配准基元的建筑物角特征,在航空影像近似外方位元素的辅助下进行点云与影像间同名角特征的自动匹配,采用光束法区域网平差和循环迭代策略,实现航空影像与点云数据的整体最优配准。具有如下优点:在不需要对激光点云进行内插的情况下,直接从激光点云中提取建筑物轮廓线,进而获得作为配准基元的建筑物角特征,避免了内插误差的引入,提高了配准精度;采用光束法区域网平差求解影像外方位元素,同时采用循环
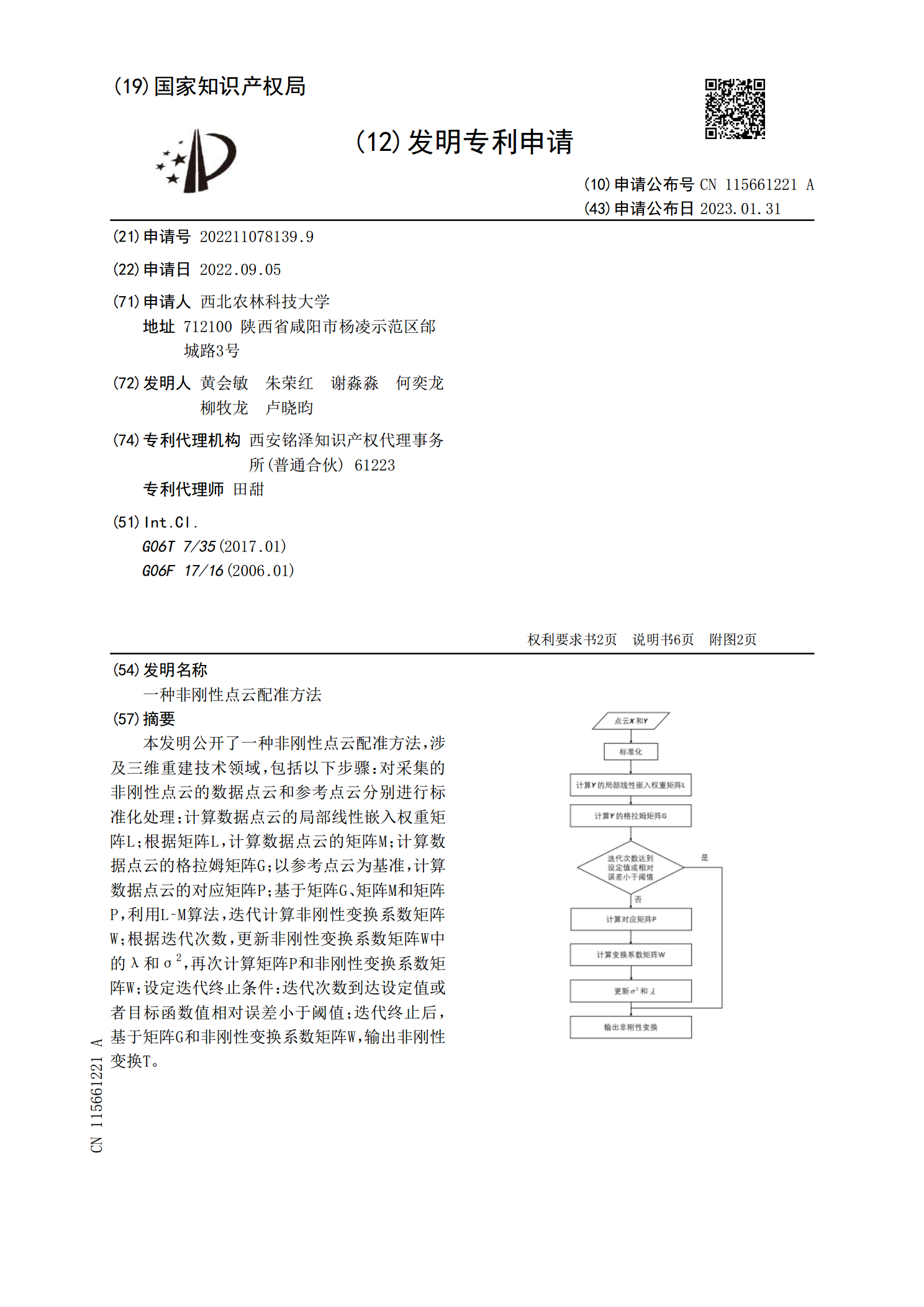
一种非刚性点云配准方法.pdf
本发明公开了一种非刚性点云配准方法,涉及三维重建技术领域,包括以下步骤:对采集的非刚性点云的数据点云和参考点云分别进行标准化处理;计算数据点云的局部线性嵌入权重矩阵L;根据矩阵L,计算数据点云的矩阵M;计算数据点云的格拉姆矩阵G;以参考点云为基准,计算数据点云的对应矩阵P;基于矩阵G、矩阵M和矩阵P,利用L‑M算法,迭代计算非刚性变换系数矩阵W;根据迭代次数,更新非刚性变换系数矩阵W中的λ和σ