
点云配准方法、装置、设备、介质和自动驾驶车辆.pdf

玉环****找我


1/10

2/10

3/10
4/10
5/10

6/10
7/10

8/10
9/10

10/10
亲,该文档总共24页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
点云配准方法、装置、设备、介质和自动驾驶车辆.pdf
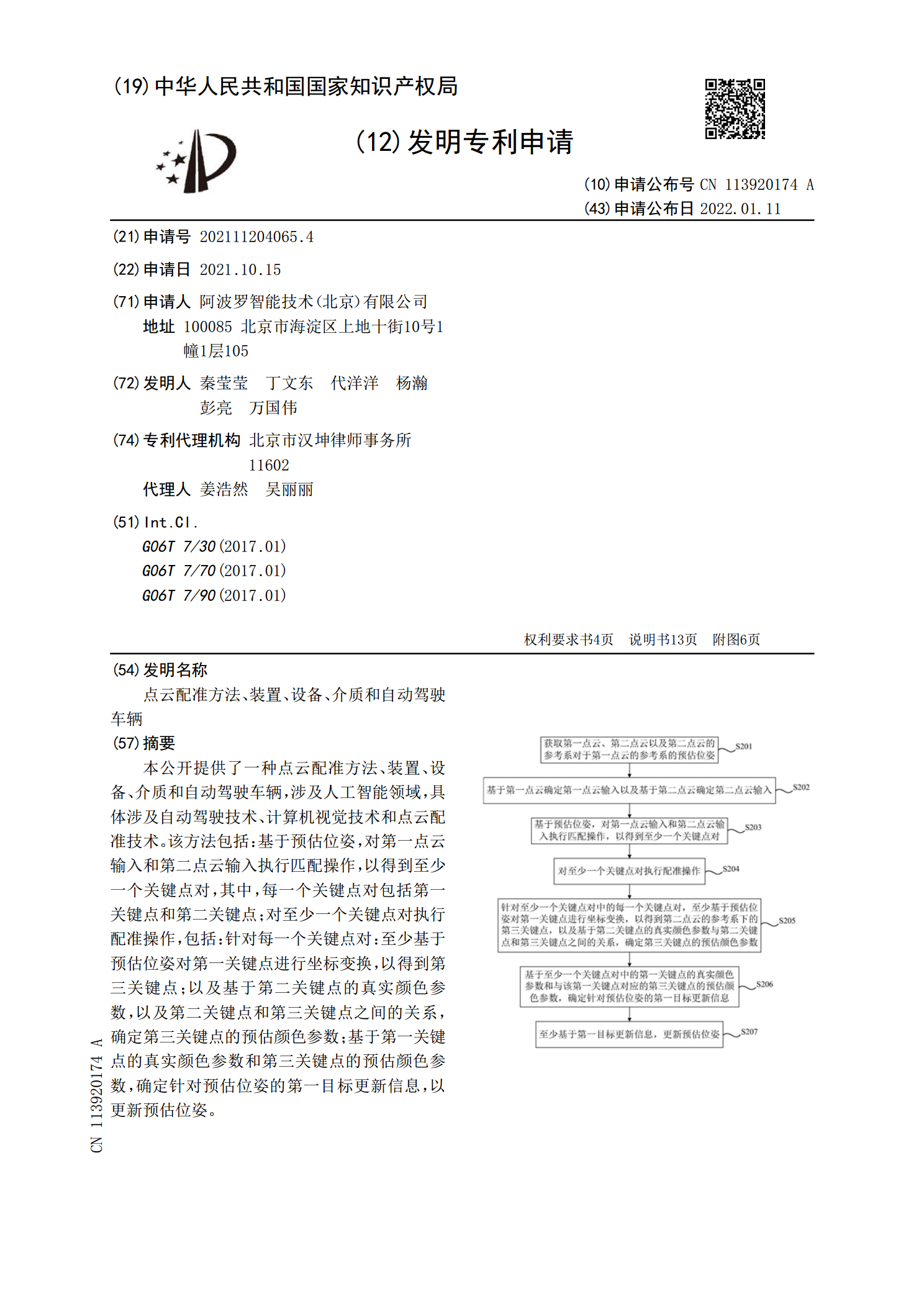
本公开提供了一种点云配准方法、装置、设备、介质和自动驾驶车辆,涉及人工智能领域,具体涉及自动驾驶技术、计算机视觉技术和点云配准技术。该方法包括:基于预估位姿,对第一点云输入和第二点云输入执行匹配操作,以得到至少一个关键点对,其中,每一个关键点对包括第一关键点和第二关键点;对至少一个关键点对执行配准操作,包括:针对每一个关键点对:至少基于预估位姿对第一关键点进行坐标变换,以得到第三关键点;以及基于第二关键点的真实颜色参数,以及第二关键点和第三关键点之间的关系,确定第三关键点的预估颜色参数;基于第一关键点的真

点云配准方法、装置、计算机设备和存储介质.pdf
本申请涉及一种点云配准方法、装置、计算机设备和存储介质。所述方法包括:获取第一点云和第二点云,第二点云被划分成包含相应数量点的第二点集,各第二点集作为目标点;对第一点云进行划分,获得包含相应数量点的第一点集;将各第一点集作为待匹配点,基于各第一点集内所有点的空间位置、反射强度以及点数量,确定相应的各待匹配点的特征;根据各待匹配点以及各目标点的空间位置和特征,对第一点云和第二点云进行配准。采用本方法能够提高配准精度。

一种点云配准方法、装置、电子设备和存储介质.pdf
本申请涉及一种点云配准方法,用于脑神经外科手术,所述方法包括:加载第一组脑部点云数据;加载第二组脑部点云数据;特征点提取以及特征点对比;通过第一组脑部点云数据与第二组脑部点云数据的位置转换关系进行图像配准,获得旋转矩阵,以便将第一组脑部点云坐标系向第二组脑部点云坐标系转换,进而得到第一组脑部点云数据在第二组脑部点云数据坐标系下的转换坐标。本申请采用自动与手动相结合的配准方法,保证结构光相机拍摄的点云中存在与CT点云相似的少量局部特征就可以满足点云配准精度要求。
高精地图点云配准的方法、装置、电子设备及存储介质.pdf
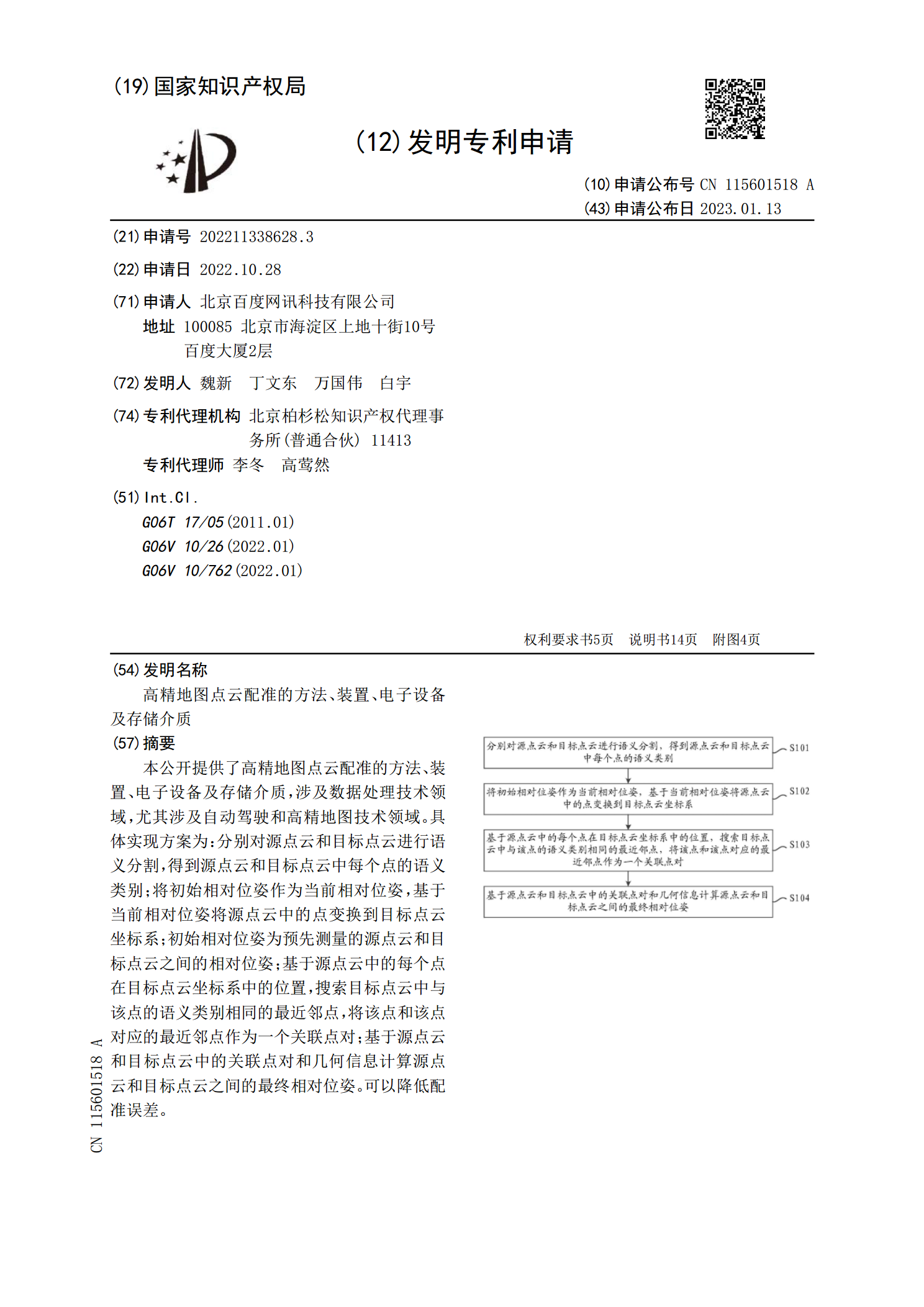
本公开提供了高精地图点云配准的方法、装置、电子设备及存储介质,涉及数据处理技术领域,尤其涉及自动驾驶和高精地图技术领域。具体实现方案为:分别对源点云和目标点云进行语义分割,得到源点云和目标点云中每个点的语义类别;将初始相对位姿作为当前相对位姿,基于当前相对位姿将源点云中的点变换到目标点云坐标系;初始相对位姿为预先测量的源点云和目标点云之间的相对位姿;基于源点云中的每个点在目标点云坐标系中的位置,搜索目标点云中与该点的语义类别相同的最近邻点,将该点和该点对应的最近邻点作为一个关联点对;基于源点云和目标点云中
高精地图点云配准方法、装置、电子设备、存储介质.pdf
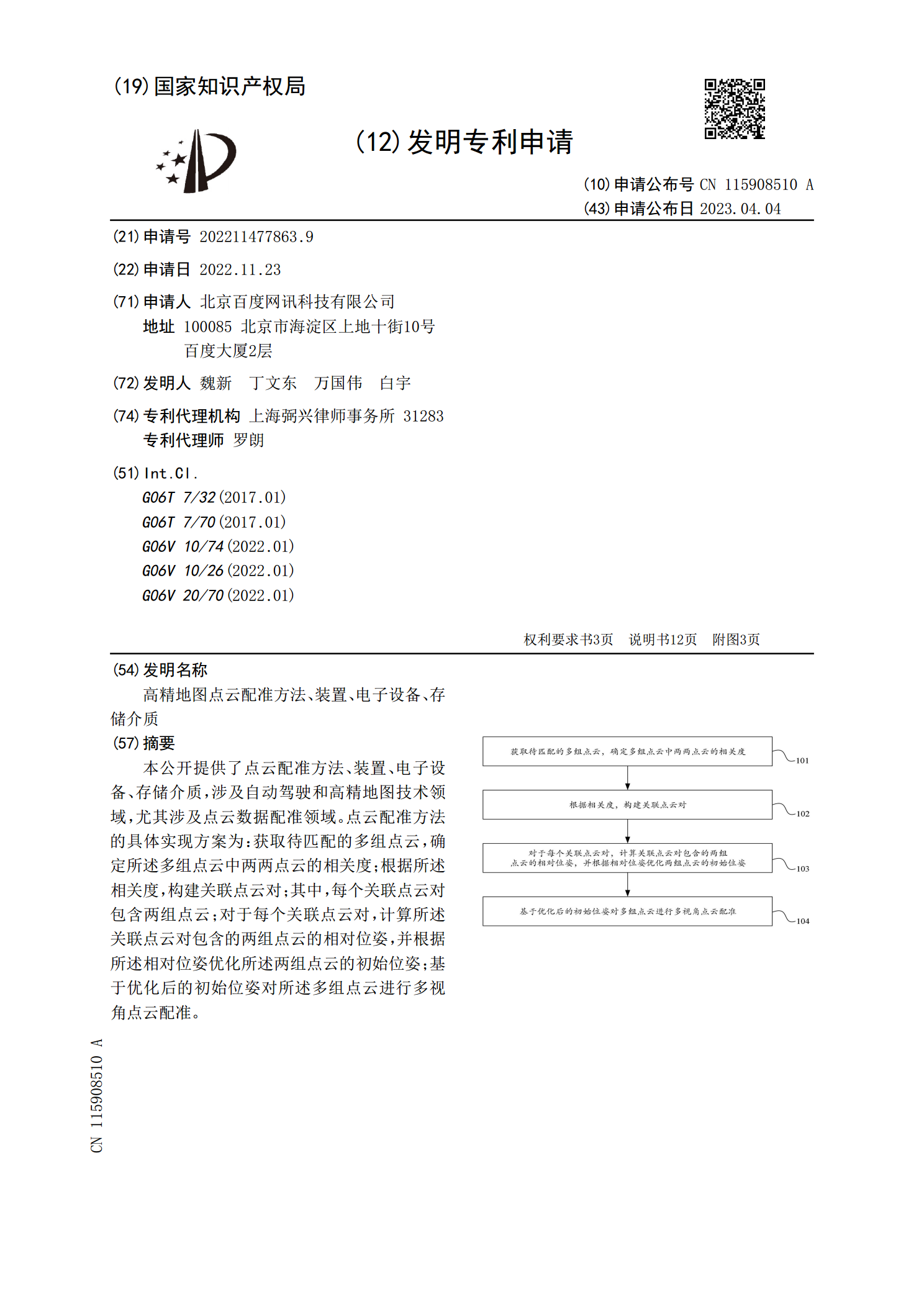
本公开提供了点云配准方法、装置、电子设备、存储介质,涉及自动驾驶和高精地图技术领域,尤其涉及点云数据配准领域。点云配准方法的具体实现方案为:获取待匹配的多组点云,确定所述多组点云中两两点云的相关度;根据所述相关度,构建关联点云对;其中,每个关联点云对包含两组点云;对于每个关联点云对,计算所述关联点云对包含的两组点云的相对位姿,并根据所述相对位姿优化所述两组点云的初始位姿;基于优化后的初始位姿对所述多组点云进行多视角点云配准。