
一种自动导引车转向控制系统及其控制方法.pdf

霞英****娘子

1/10

2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种自动导引车转向控制系统及其控制方法.pdf
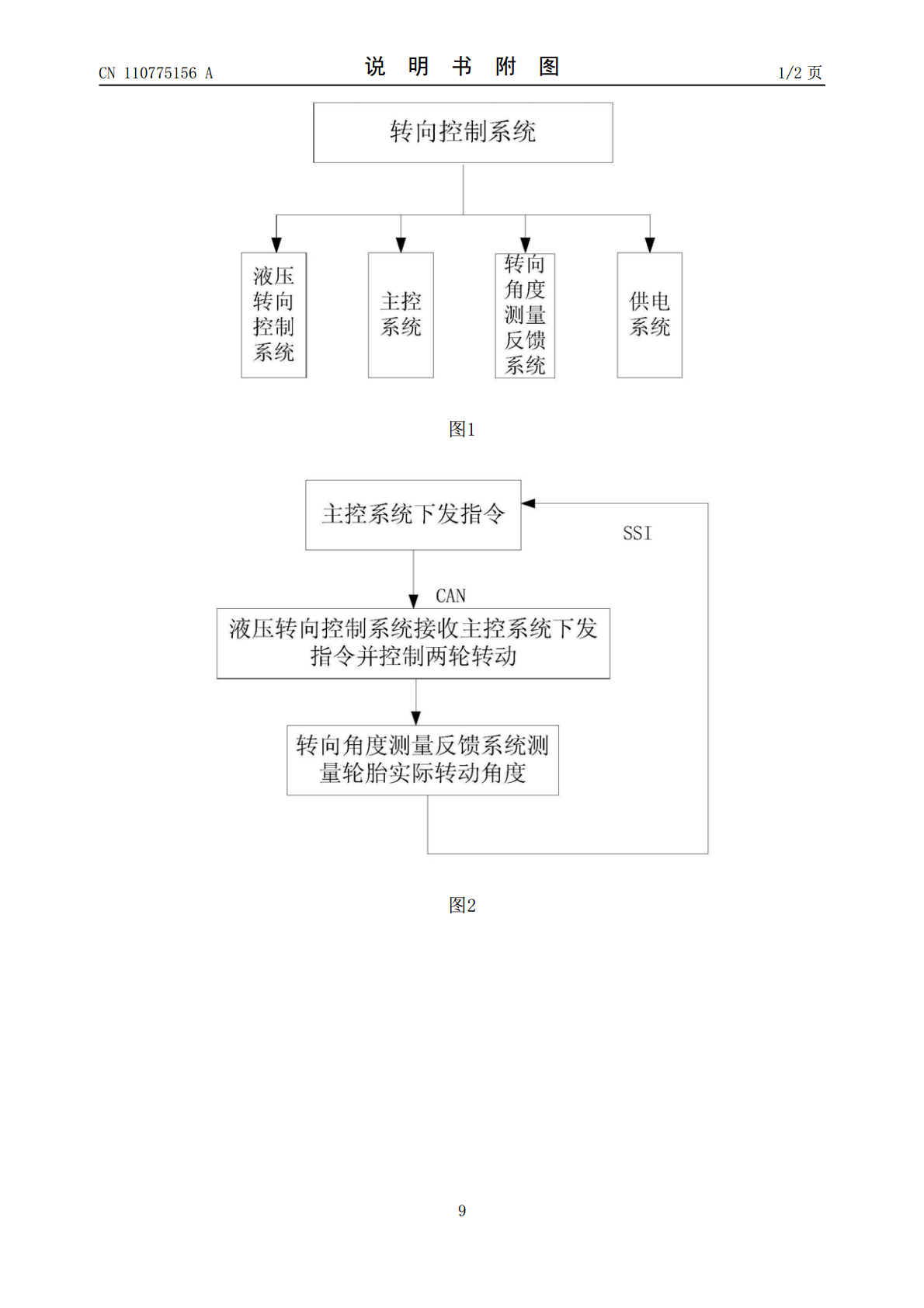
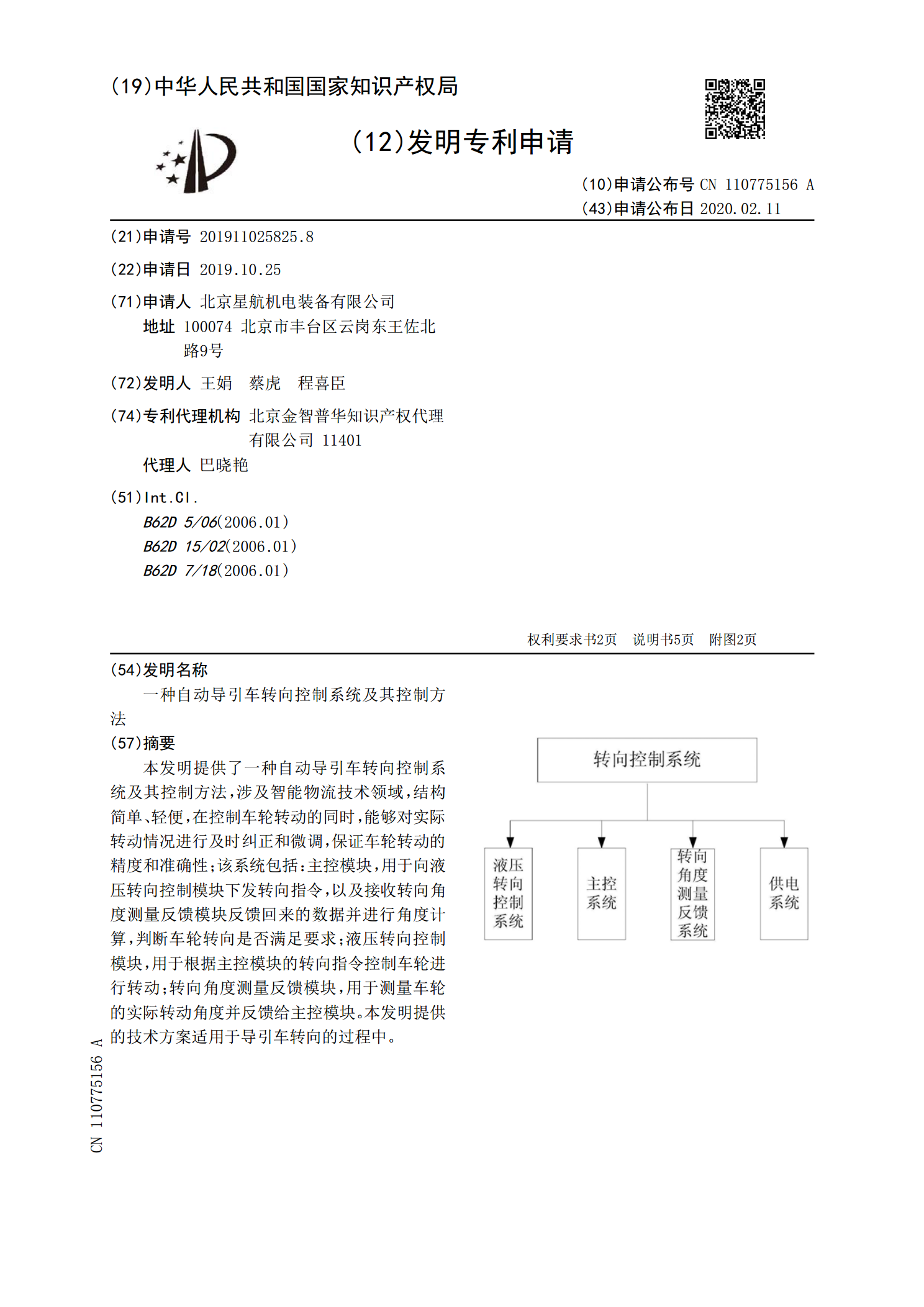
本发明提供了一种自动导引车转向控制系统及其控制方法,涉及智能物流技术领域,结构简单、轻便,在控制车轮转动的同时,能够对实际转动情况进行及时纠正和微调,保证车轮转动的精度和准确性;该系统包括:主控模块,用于向液压转向控制模块下发转向指令,以及接收转向角度测量反馈模块反馈回来的数据并进行角度计算,判断车轮转向是否满足要求;液压转向控制模块,用于根据主控模块的转向指令控制车轮进行转动;转向角度测量反馈模块,用于测量车轮的实际转动角度并反馈给主控模块。本发明提供的技术方案适用于导引车转向的过程中。
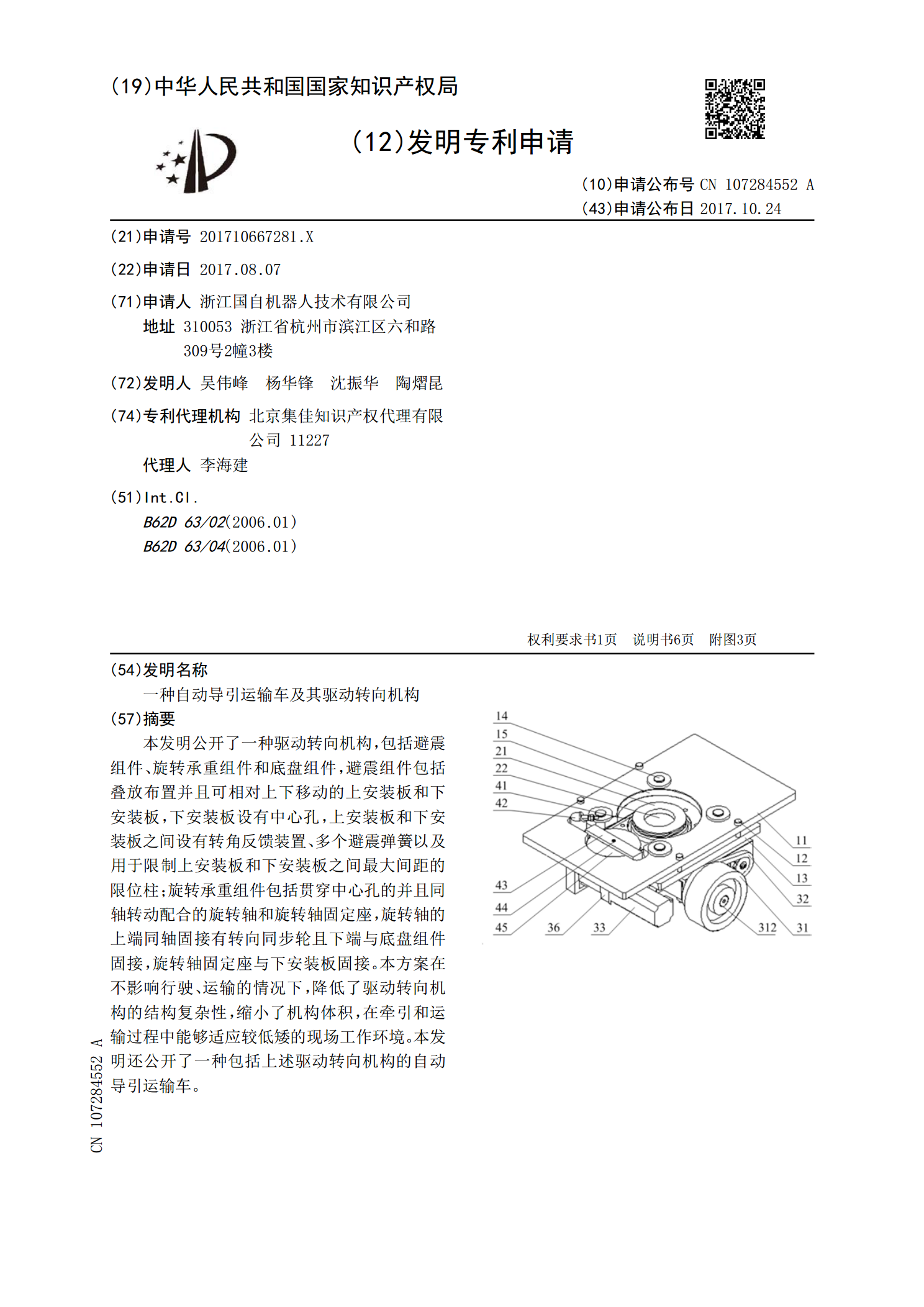
一种自动导引运输车及其驱动转向机构.pdf
本发明公开了一种驱动转向机构,包括避震组件、旋转承重组件和底盘组件,避震组件包括叠放布置并且可相对上下移动的上安装板和下安装板,下安装板设有中心孔,上安装板和下安装板之间设有转角反馈装置、多个避震弹簧以及用于限制上安装板和下安装板之间最大间距的限位柱;旋转承重组件包括贯穿中心孔的并且同轴转动配合的旋转轴和旋转轴固定座,旋转轴的上端同轴固接有转向同步轮且下端与底盘组件固接,旋转轴固定座与下安装板固接。本方案在不影响行驶、运输的情况下,降低了驱动转向机构的结构复杂性,缩小了机构体积,在牵引和运输过程中能够适应
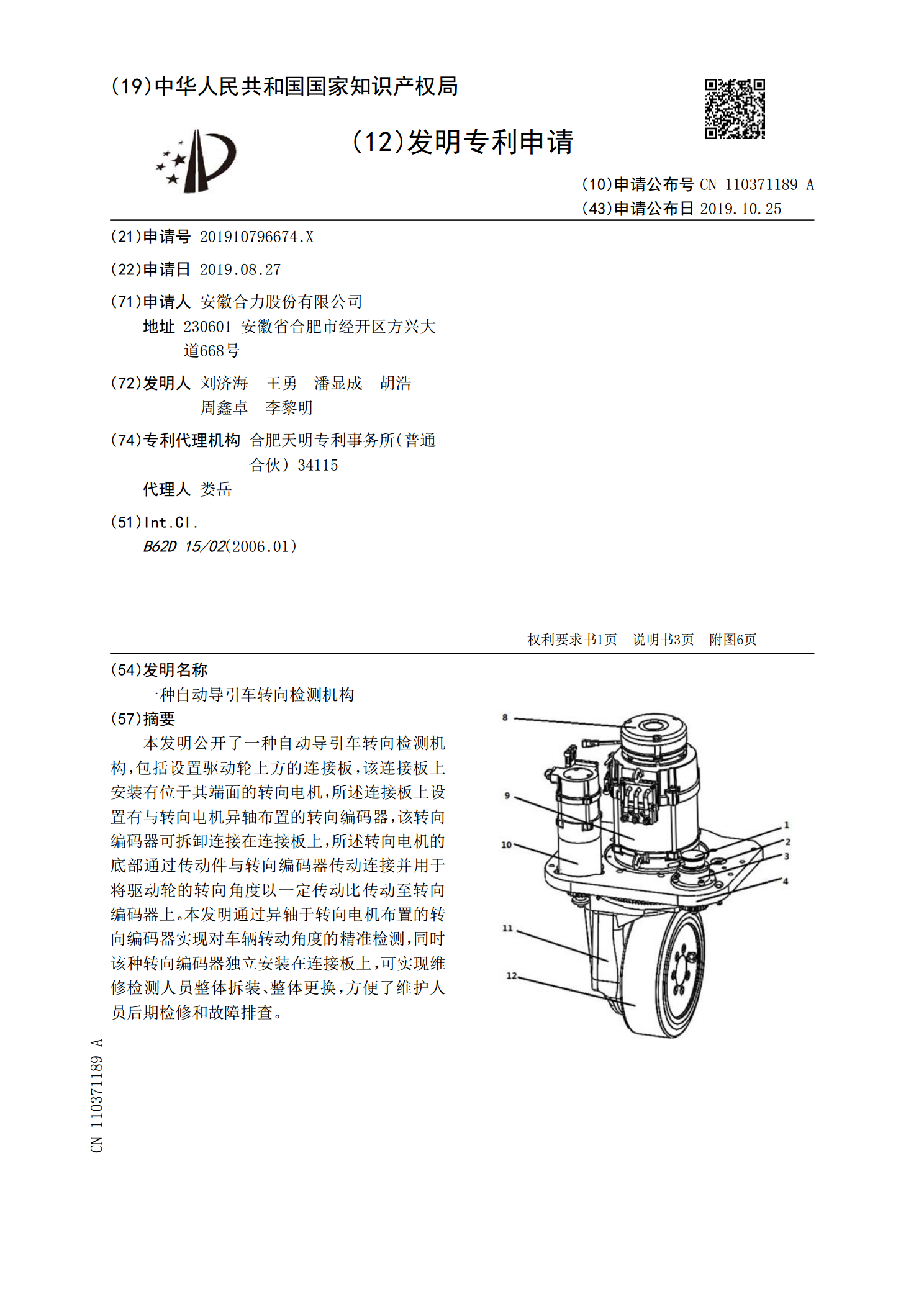
一种自动导引车转向检测机构.pdf
本发明公开了一种自动导引车转向检测机构,包括设置驱动轮上方的连接板,该连接板上安装有位于其端面的转向电机,所述连接板上设置有与转向电机异轴布置的转向编码器,该转向编码器可拆卸连接在连接板上,所述转向电机的底部通过传动件与转向编码器传动连接并用于将驱动轮的转向角度以一定传动比传动至转向编码器上。本发明通过异轴于转向电机布置的转向编码器实现对车辆转动角度的精准检测,同时该种转向编码器独立安装在连接板上,可实现维修检测人员整体拆装、整体更换,方便了维护人员后期检修和故障排查。
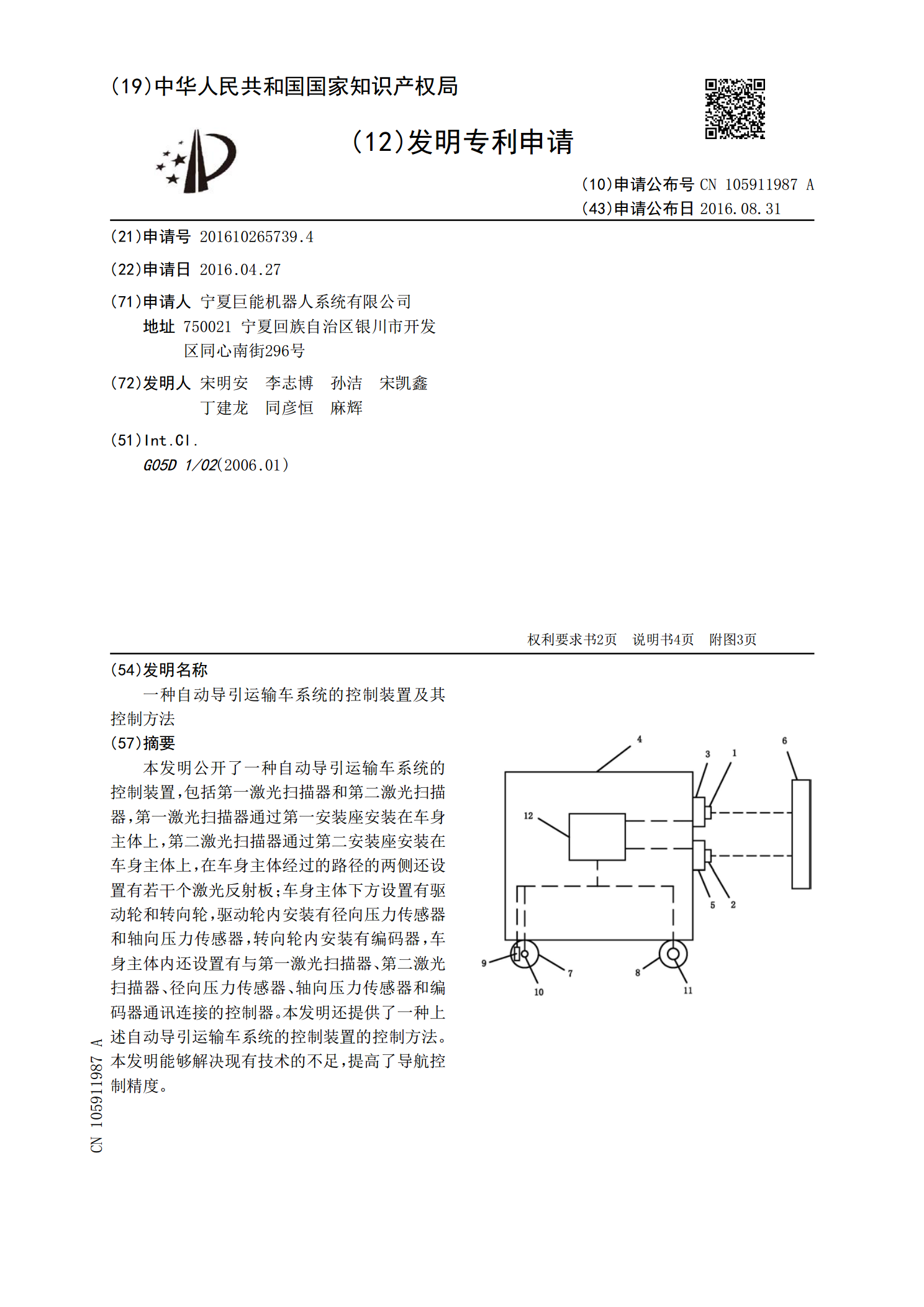
一种自动导引运输车系统的控制装置及其控制方法.pdf
本发明公开了一种自动导引运输车系统的控制装置,包括第一激光扫描器和第二激光扫描器,第一激光扫描器通过第一安装座安装在车身主体上,第二激光扫描器通过第二安装座安装在车身主体上,在车身主体经过的路径的两侧还设置有若干个激光反射板;车身主体下方设置有驱动轮和转向轮,驱动轮内安装有径向压力传感器和轴向压力传感器,转向轮内安装有编码器,车身主体内还设置有与第一激光扫描器、第二激光扫描器、径向压力传感器、轴向压力传感器和编码器通讯连接的控制器。本发明还提供了一种上述自动导引运输车系统的控制装置的控制方法。本发明能够解
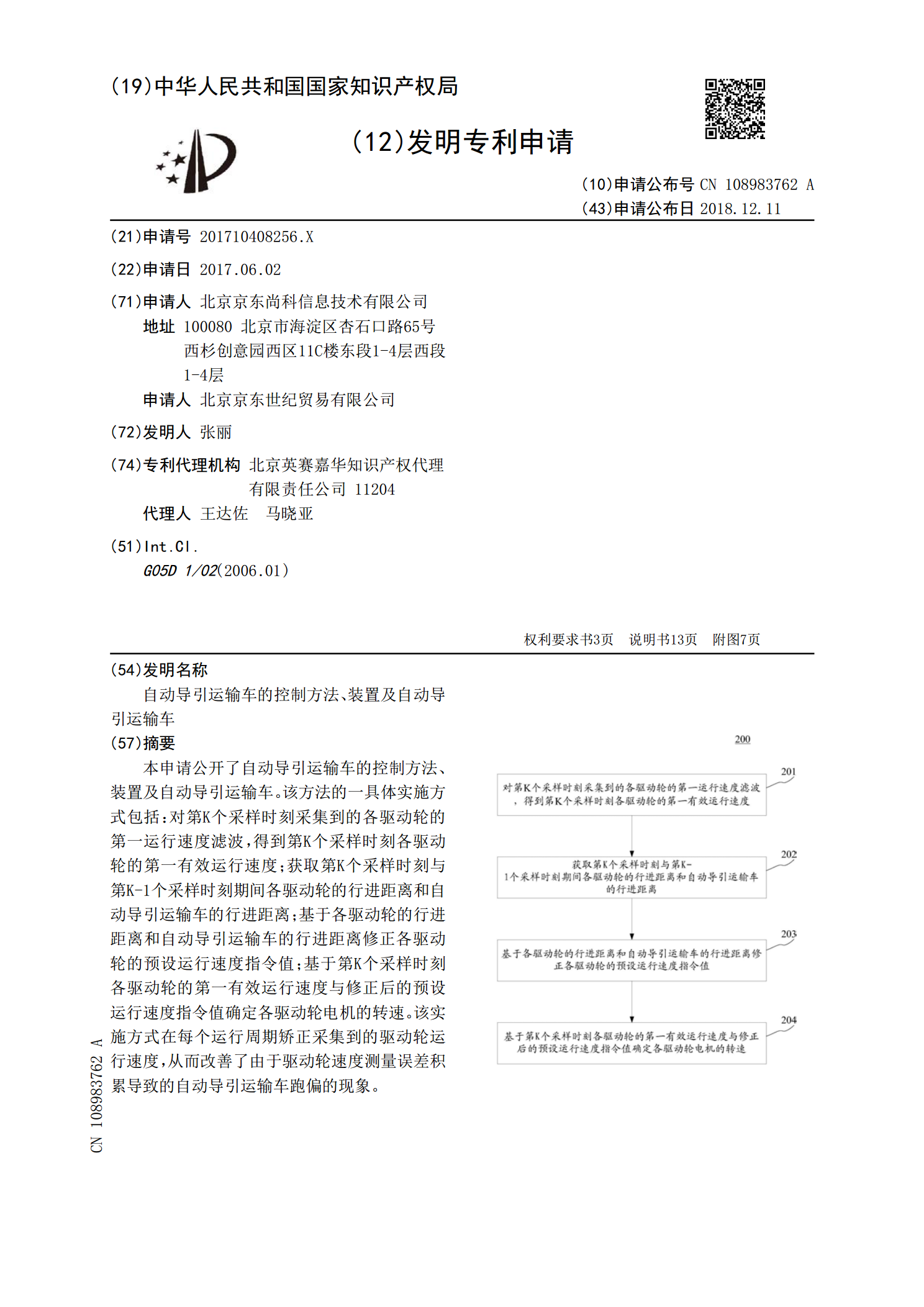
自动导引运输车的控制方法、装置及自动导引运输车.pdf
本申请公开了自动导引运输车的控制方法、装置及自动导引运输车。该方法的一具体实施方式包括:对第K个采样时刻采集到的各驱动轮的第一运行速度滤波,得到第K个采样时刻各驱动轮的第一有效运行速度;获取第K个采样时刻与第K‑1个采样时刻期间各驱动轮的行进距离和自动导引运输车的行进距离;基于各驱动轮的行进距离和自动导引运输车的行进距离修正各驱动轮的预设运行速度指令值;基于第K个采样时刻各驱动轮的第一有效运行速度与修正后的预设运行速度指令值确定各驱动轮电机的转速。该实施方式在每个运行周期矫正采集到的驱动轮运行速度,从而改