
机器手臂的刹车装置.pdf

努力****幻翠


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

机器手臂的刹车装置.pdf
本发明公开一种机器手臂的刹车装置,刹车时释放结合板,使结合板抵抗复位弹簧的弹力,顺着导引销滑动,结合板承载结合块接近棘轮,结合块先行接触下层齿系,降低棘轮的转动速度,使结合块钳入大间隔的双层齿系,持续降至低速,再让棘轮的密集间隔的外周齿系啮合结合板的档齿系,以停止机器手臂。

机器手臂的教导装置及方法.pdf
本发明公开一种机器手臂的教导装置及方法,按压切换钮,切换末端感测器为力感测器,侦测作用的牵引力,使机器手臂顺着牵引力移动,进行牵引教导,切换末端感测器为输入装置时,预先设定外力作用末端感测器的预定方向,作为多种输入信号,以操作引导装置的设定程序。

机器人手臂驱动装置.pdf
本发明公开了一种机器人手臂驱动装置,所述的机器人手臂驱动装置包含一第一连接支架和一第二连接支架,所述的第一连接支架通过一第一连杆与所述的第二连接支架相连接,所述的第二连接支架通过一连接凸块与一第二连杆相连接,所述的?第一连接支架的底部设有一可转动的驱动底盘,所述的驱动底盘上设有一对平行设置的驱动模块。本发明的机器人手臂驱动装置利用设置在驱动底盘上的一对平行设置的驱动模块,大大增强了初级电机的驱动能力,同时不必占用较大的空间。另外,由于步进电机的驱动凸轮直接与第一连接支架的连接突片的末端相连接,动力传递更为

传动装置及机器人手臂装置.pdf
【目的】为了精确地检测旋转角度且也为了更加安全地驱动。【解决方法】本发明提供了一种传动装置(300),该传动装置(300)包括:减速齿轮(320),该减速齿轮(320)通过一定减速比降低接合至电机(360)的旋转轴的输入轴的旋转速度,并将降低的旋转速度发送给输出轴(350);第一绝对角度编码器(330),该第一绝对角度编码器(330)检测输入轴的旋转角度;和第二绝对角度编码器(340),该第二绝对角度编码器(340)检测输出轴的旋转角度。
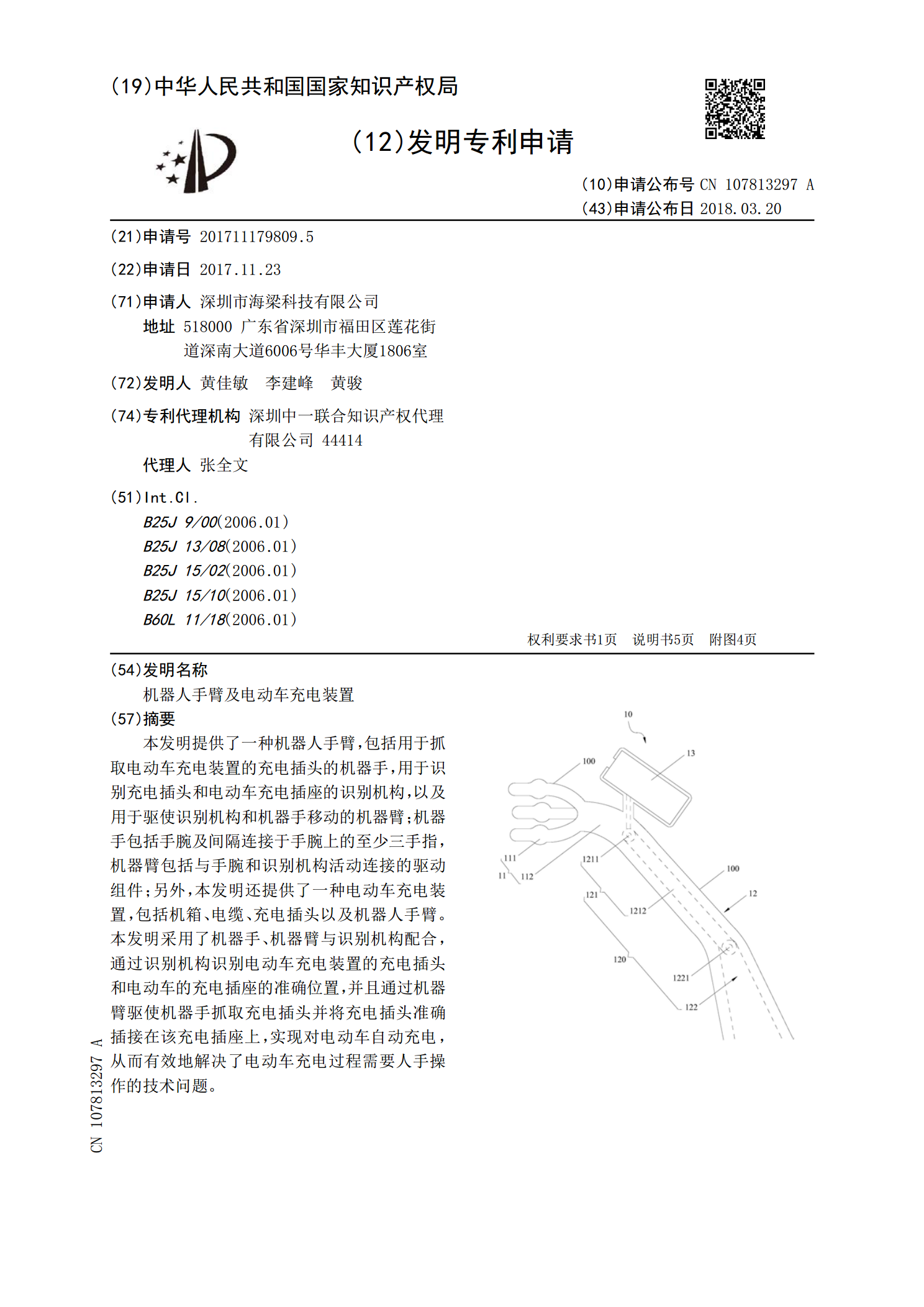
机器人手臂及电动车充电装置.pdf
本发明提供了一种机器人手臂,包括用于抓取电动车充电装置的充电插头的机器手,用于识别充电插头和电动车充电插座的识别机构,以及用于驱使识别机构和机器手移动的机器臂;机器手包括手腕及间隔连接于手腕上的至少三手指,机器臂包括与手腕和识别机构活动连接的驱动组件;另外,本发明还提供了一种电动车充电装置,包括机箱、电缆、充电插头以及机器人手臂。本发明采用了机器手、机器臂与识别机构配合,通过识别机构识别电动车充电装置的充电插头和电动车的充电插座的准确位置,并且通过机器臂驱使机器手抓取充电插头并将充电插头准确插接在该充电插