
一种带有多种支撑轮的攀壁作业机器.pdf

睿德****找我


1/10
2/10
3/10

4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种带有多种支撑轮的攀壁作业机器.pdf
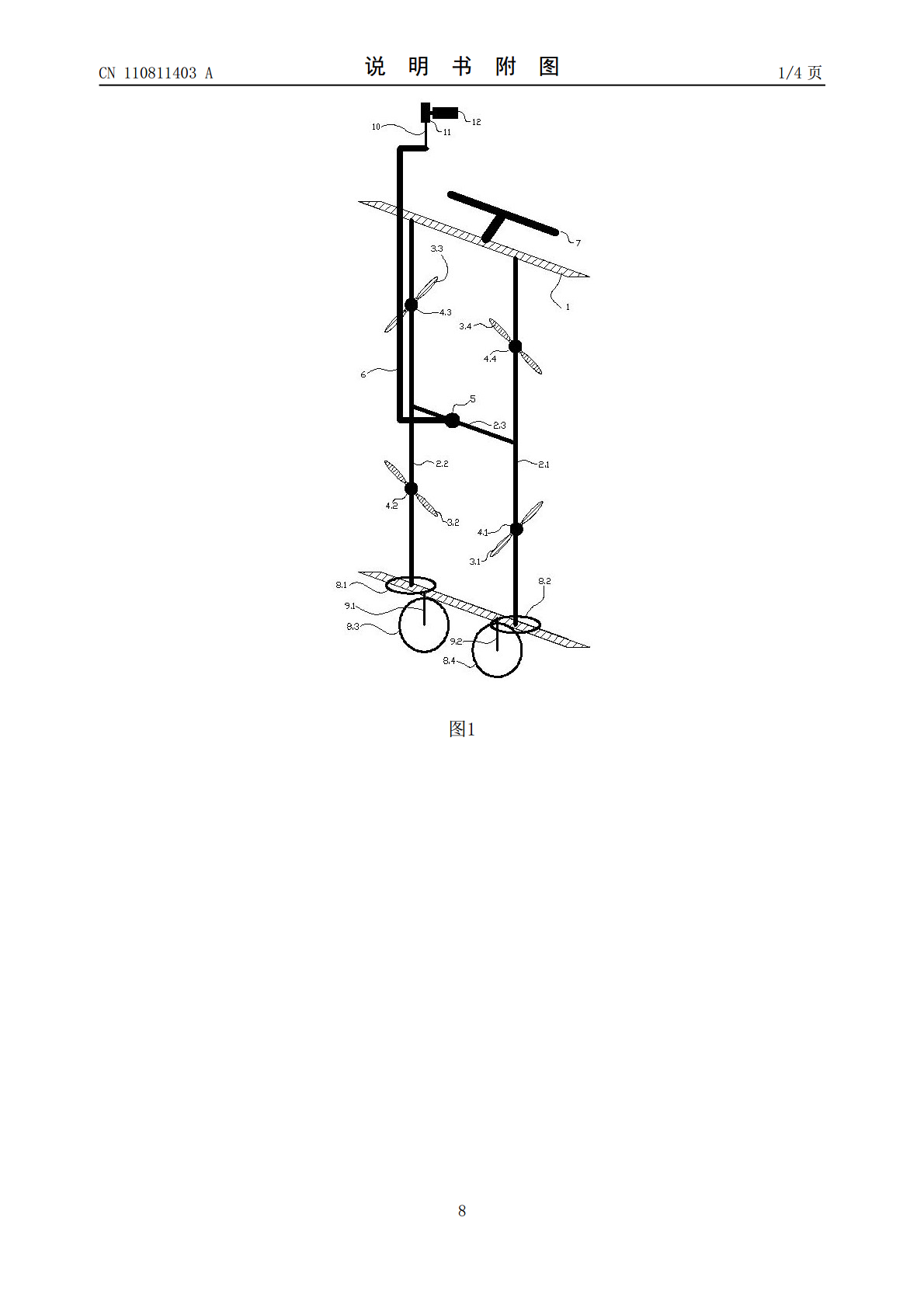
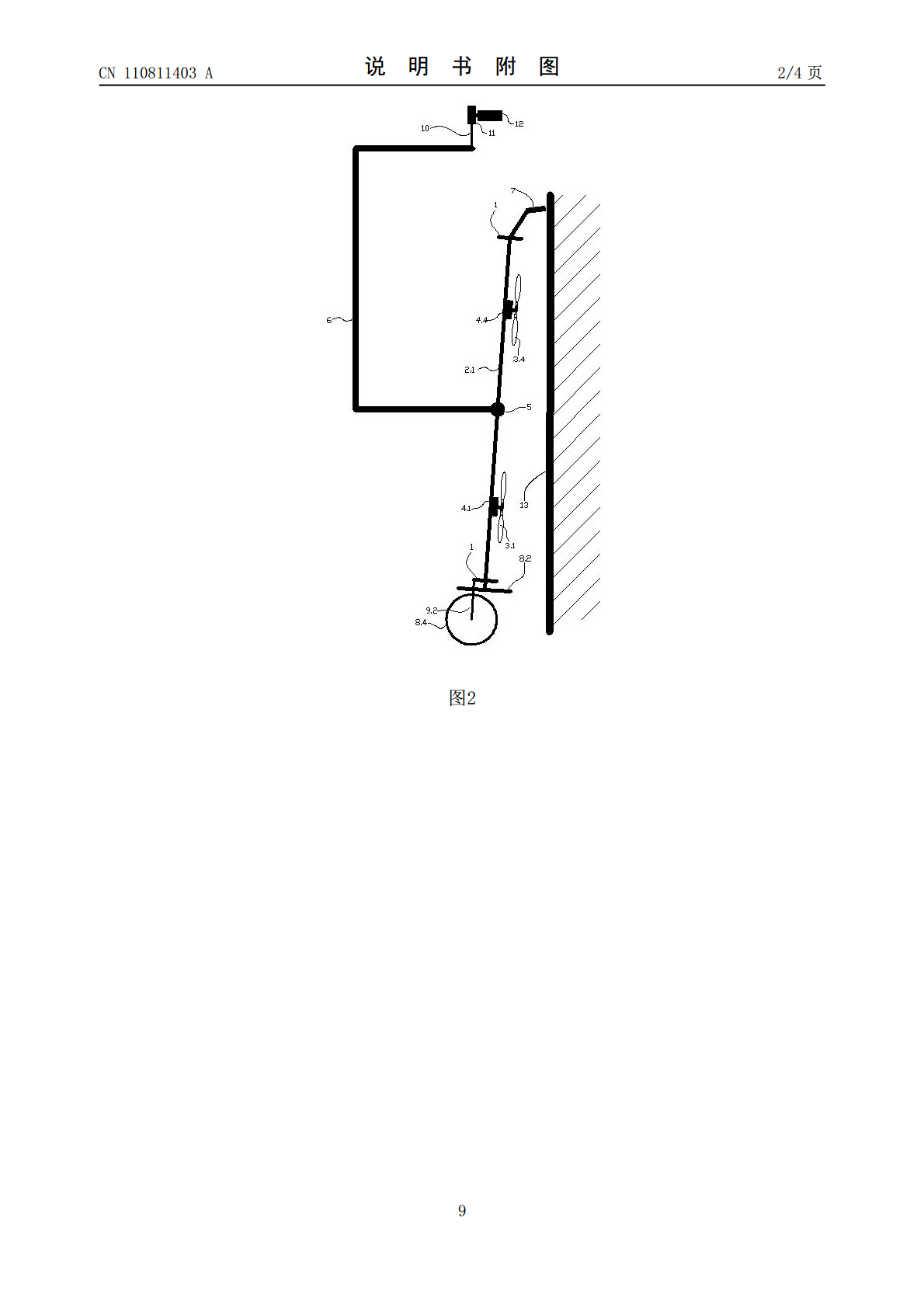
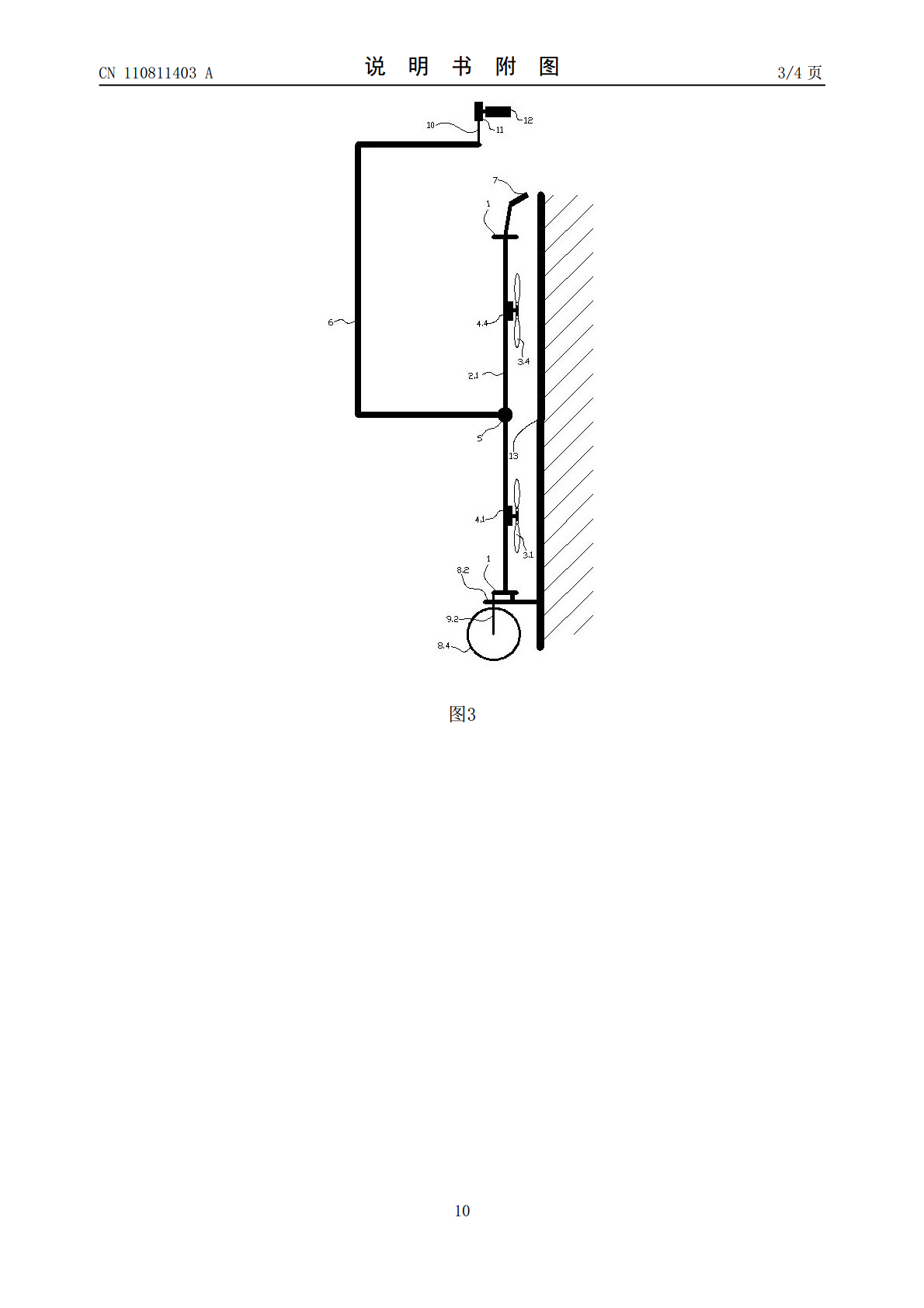
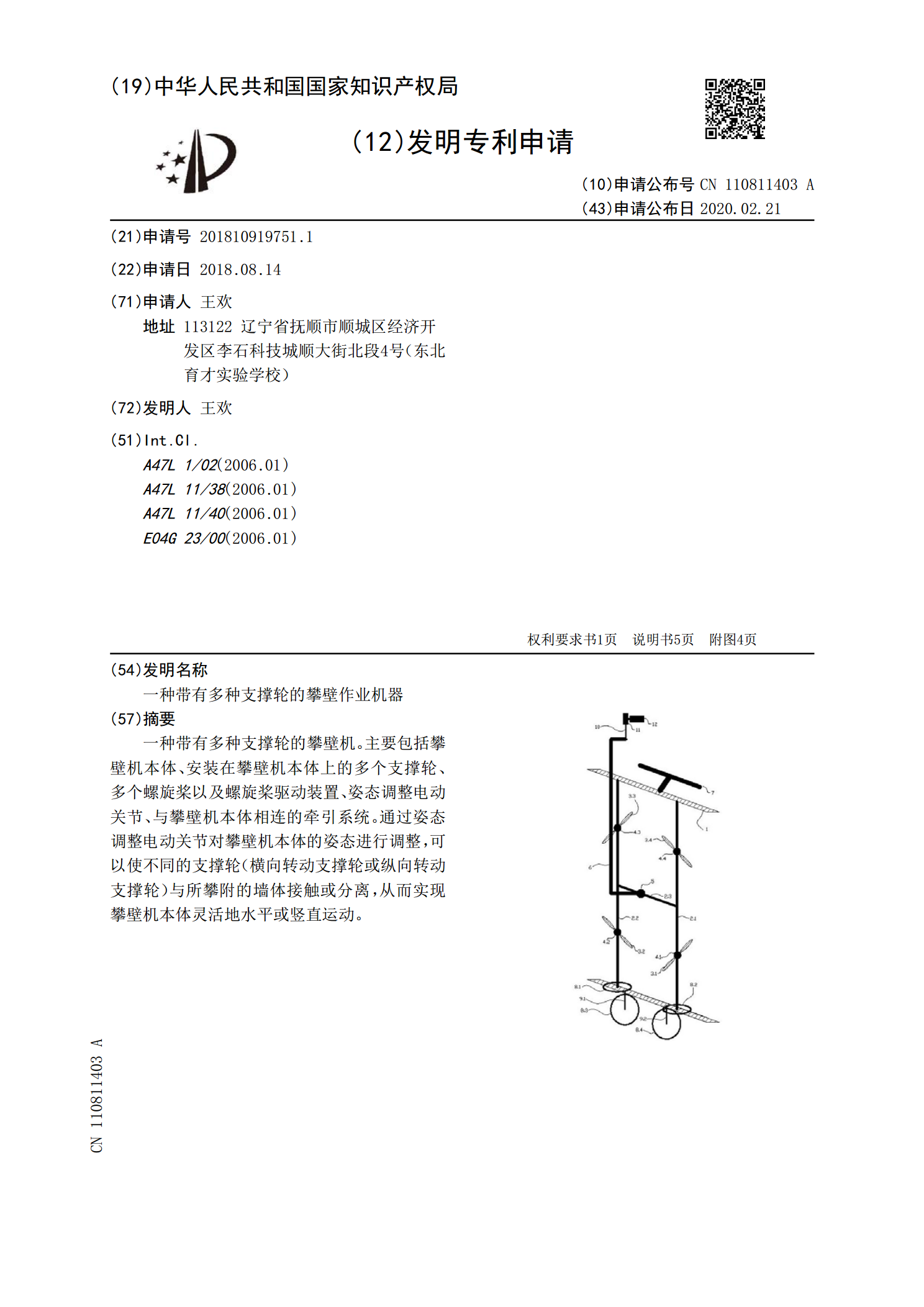
一种带有多种支撑轮的攀壁机。主要包括攀壁机本体、安装在攀壁机本体上的多个支撑轮、多个螺旋桨以及螺旋桨驱动装置、姿态调整电动关节、与攀壁机本体相连的牵引系统。通过姿态调整电动关节对攀壁机本体的姿态进行调整,可以使不同的支撑轮(横向转动支撑轮或纵向转动支撑轮)与所攀附的墙体接触或分离,从而实现攀壁机本体灵活地水平或竖直运动。
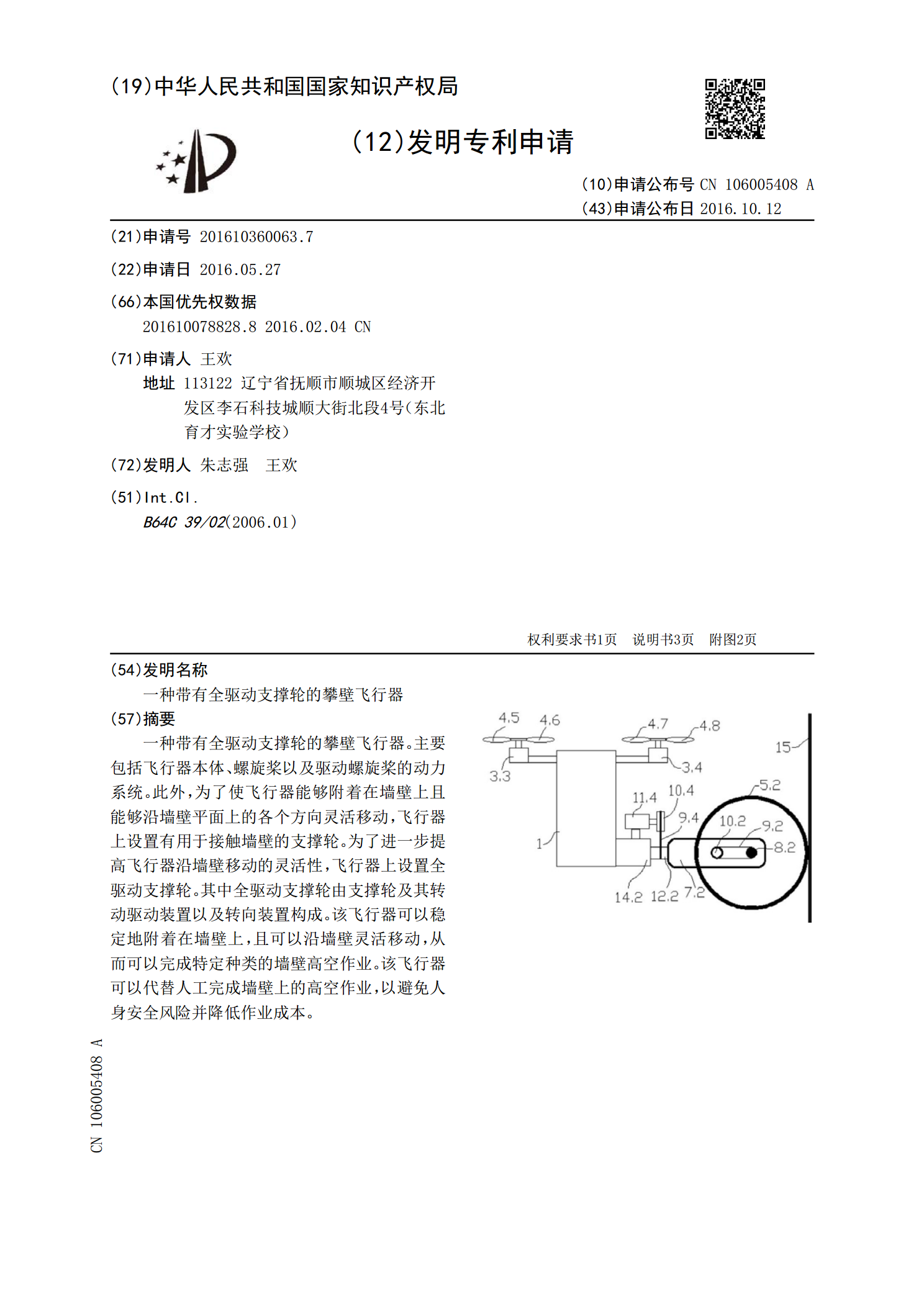
一种带有全驱动支撑轮的攀壁飞行器.pdf
一种带有全驱动支撑轮的攀壁飞行器。主要包括飞行器本体、螺旋桨以及驱动螺旋桨的动力系统。此外,为了使飞行器能够附着在墙壁上且能够沿墙壁平面上的各个方向灵活移动,飞行器上设置有用于接触墙壁的支撑轮。为了进一步提高飞行器沿墙壁移动的灵活性,飞行器上设置全驱动支撑轮。其中全驱动支撑轮由支撑轮及其转动驱动装置以及转向装置构成。该飞行器可以稳定地附着在墙壁上,且可以沿墙壁灵活移动,从而可以完成特定种类的墙壁高空作业。该飞行器可以代替人工完成墙壁上的高空作业,以避免人身安全风险并降低作业成本。
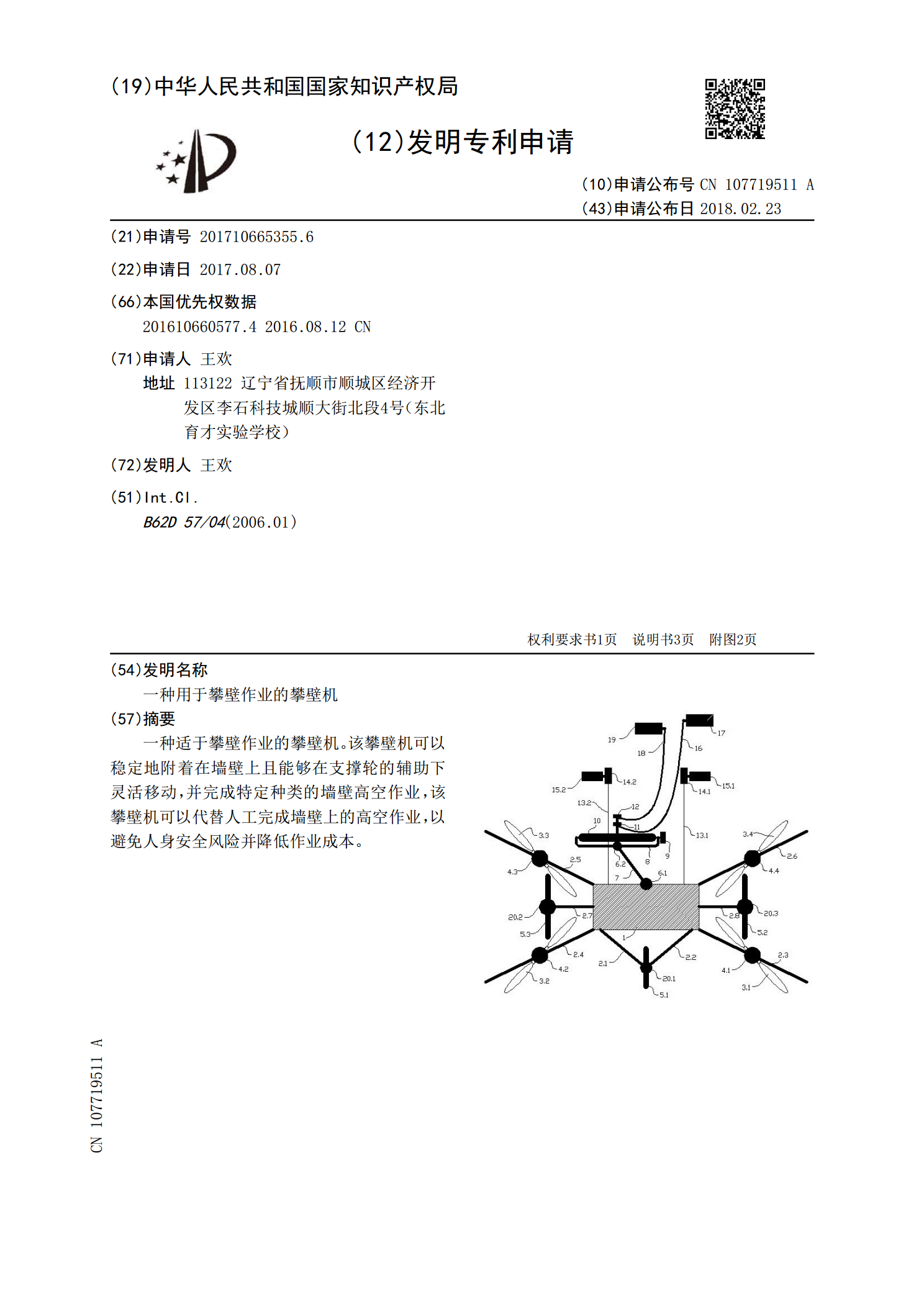
一种用于攀壁作业的攀壁机.pdf
一种适于攀壁作业的攀壁机。该攀壁机可以稳定地附着在墙壁上且能够在支撑轮的辅助下灵活移动,并完成特定种类的墙壁高空作业,该攀壁机可以代替人工完成墙壁上的高空作业,以避免人身安全风险并降低作业成本。
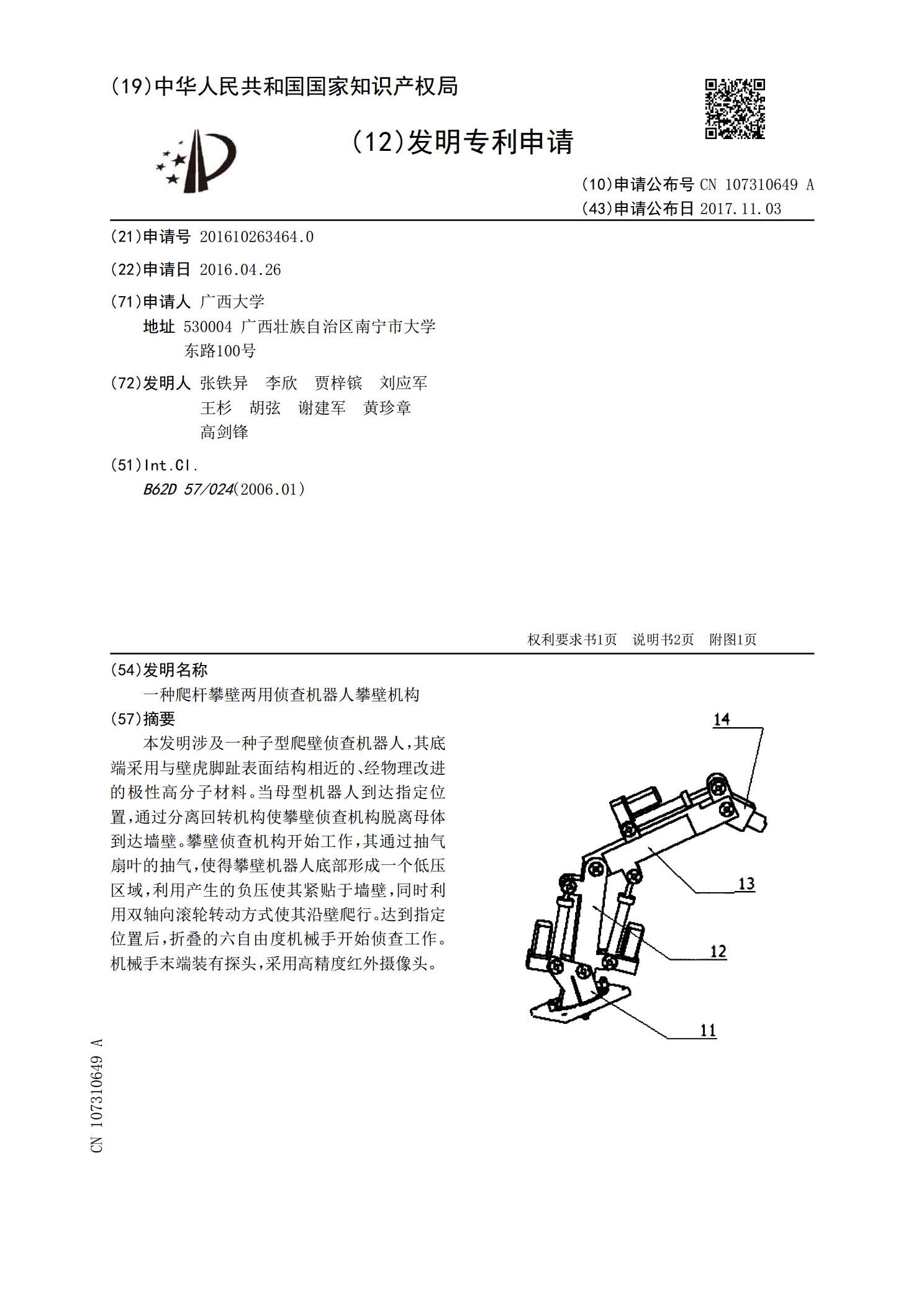
一种爬杆攀壁两用侦查机器人攀壁机构.pdf
本发明涉及一种子型爬壁侦查机器人,其底端采用与壁虎脚趾表面结构相近的、经物理改进的极性高分子材料。当母型机器人到达指定位置,通过分离回转机构使攀壁侦查机构脱离母体到达墙壁。攀壁侦查机构开始工作,其通过抽气扇叶的抽气,使得攀壁机器人底部形成一个低压区域,利用产生的负压使其紧贴于墙壁,同时利用双轴向滚轮转动方式使其沿壁爬行。达到指定位置后,折叠的六自由度机械手开始侦查工作。机械手末端装有探头,采用高精度红外摄像头。
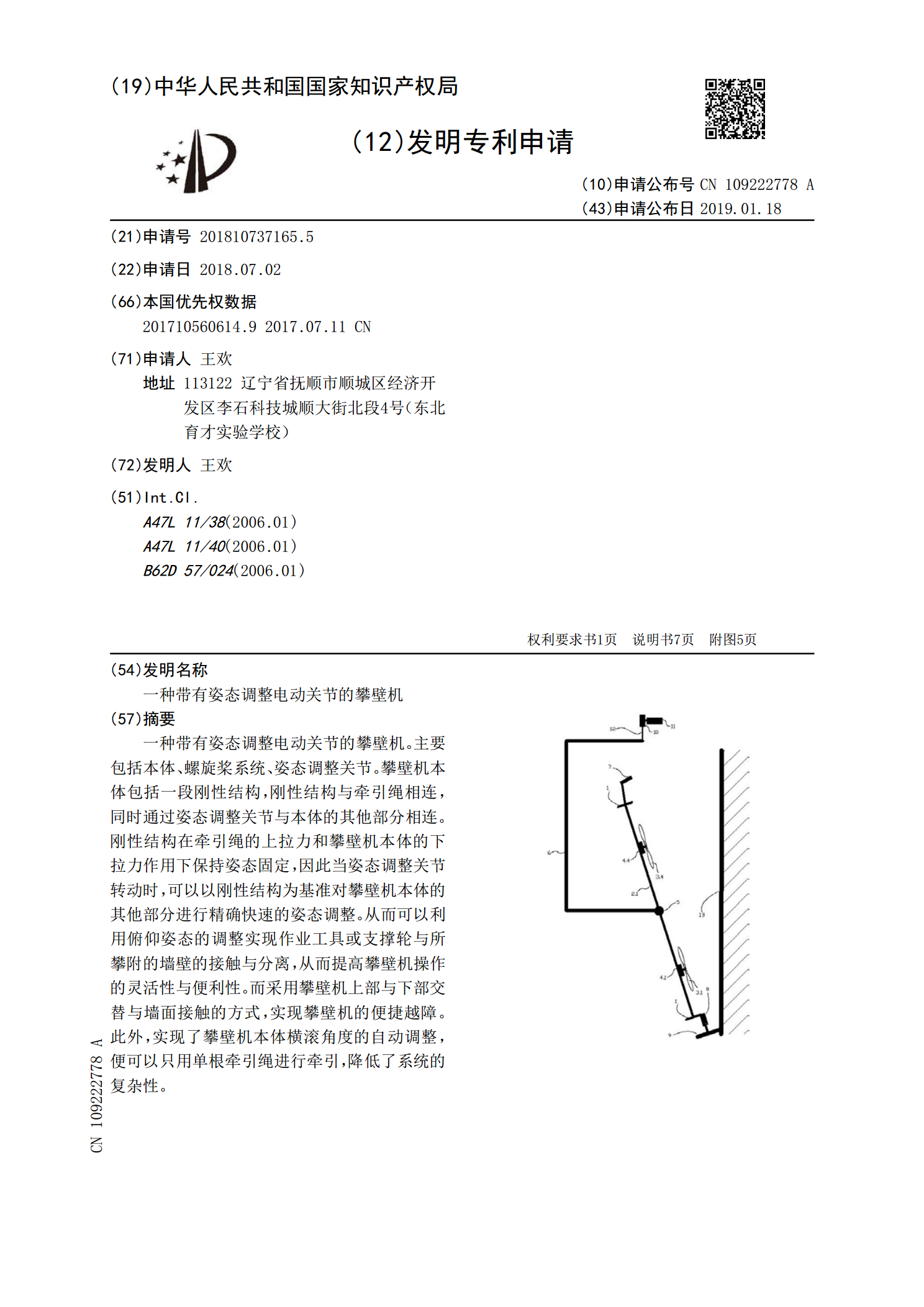
一种带有姿态调整电动关节的攀壁机.pdf
一种带有姿态调整电动关节的攀壁机。主要包括本体、螺旋桨系统、姿态调整关节。攀壁机本体包括一段刚性结构,刚性结构与牵引绳相连,同时通过姿态调整关节与本体的其他部分相连。刚性结构在牵引绳的上拉力和攀壁机本体的下拉力作用下保持姿态固定,因此当姿态调整关节转动时,可以以刚性结构为基准对攀壁机本体的其他部分进行精确快速的姿态调整。从而可以利用俯仰姿态的调整实现作业工具或支撑轮与所攀附的墙壁的接触与分离,从而提高攀壁机操作的灵活性与便利性。而采用攀壁机上部与下部交替与墙面接触的方式,实现攀壁机的便捷越障。此外,实现了