
一种电动车的驻坡控制方法、电动车和可读存储介质.pdf

康平****ng

1/8
2/8
3/8
4/8
5/8

6/8

7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种电动车的驻坡控制方法、电动车和可读存储介质.pdf
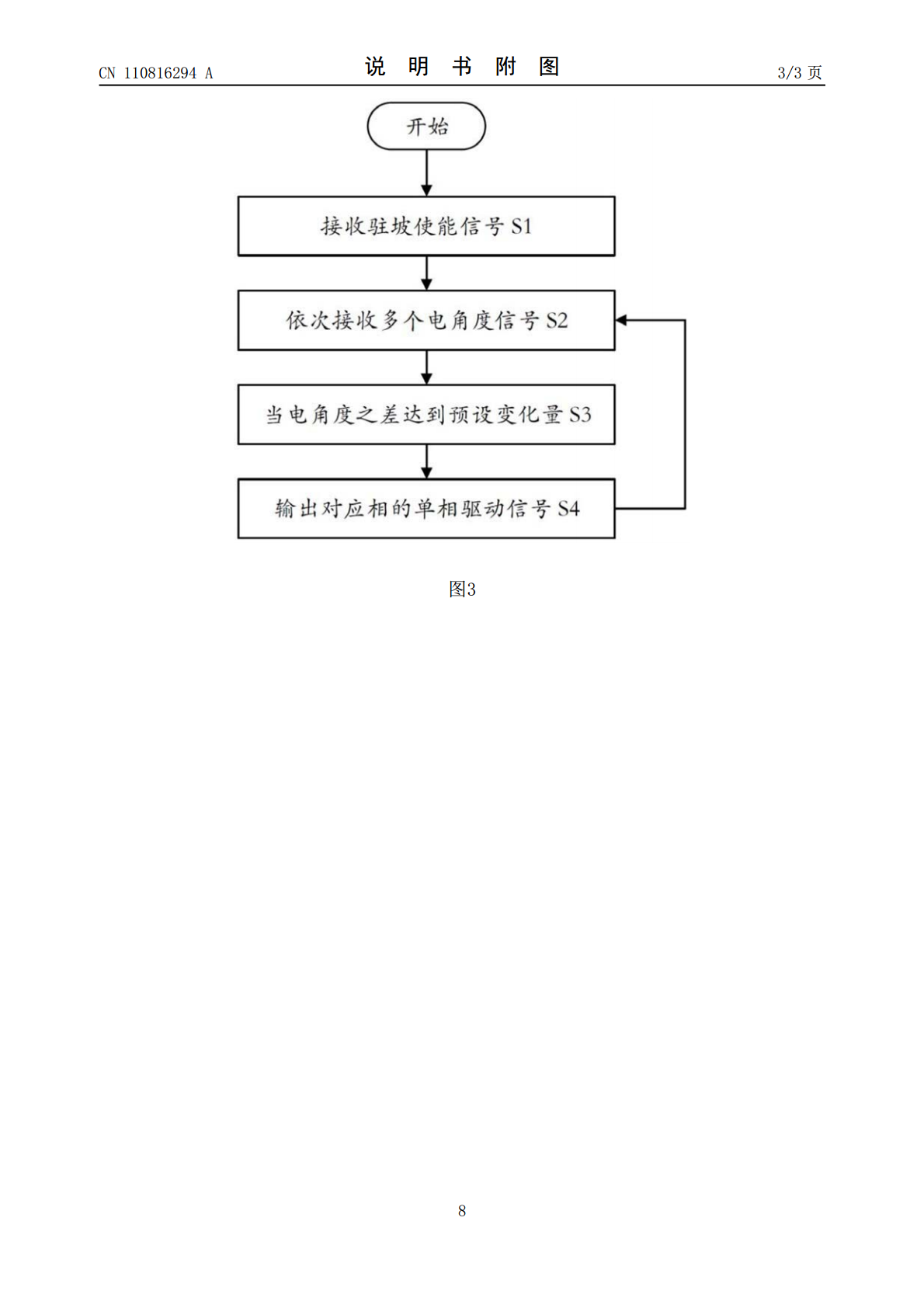
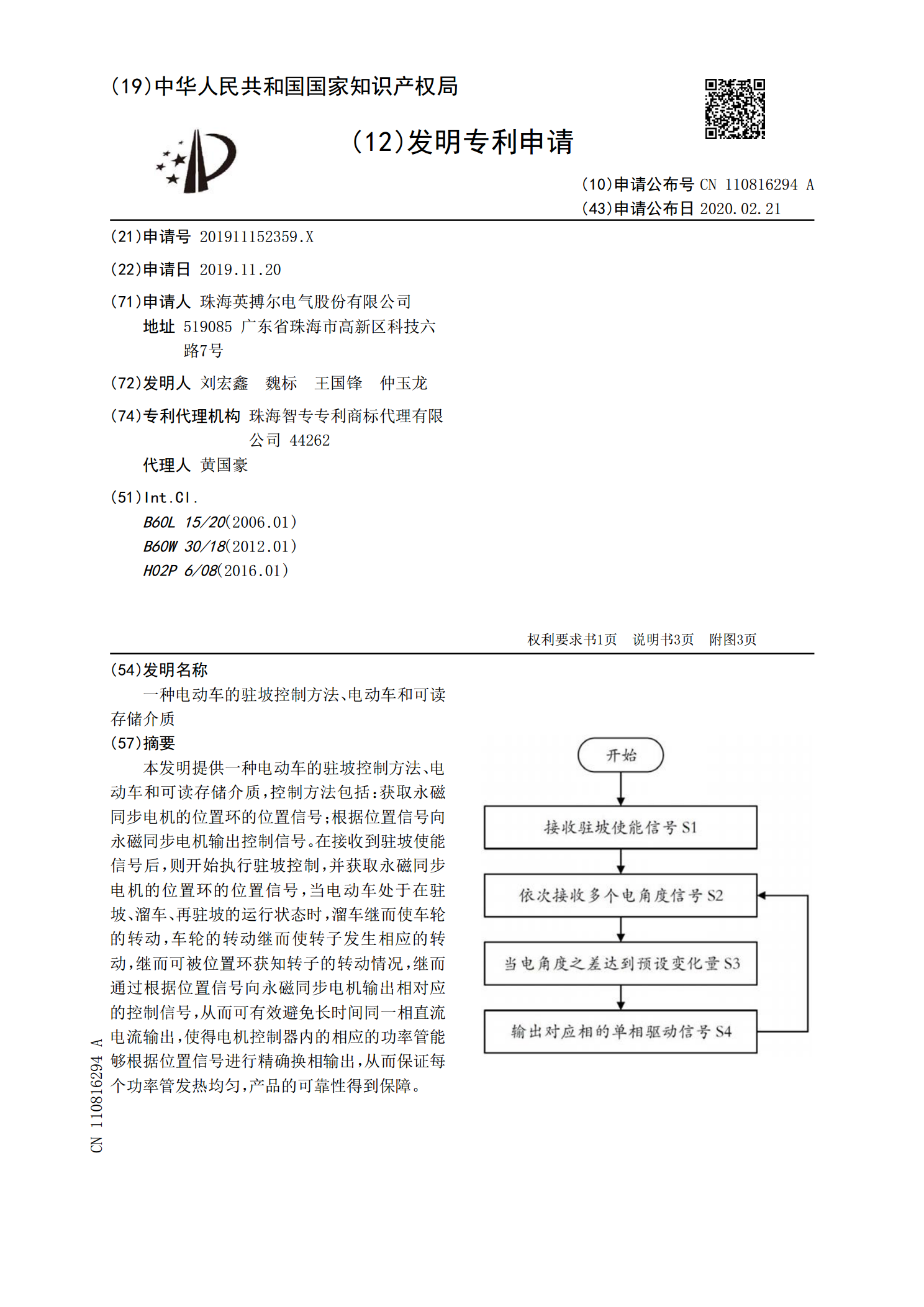
本发明提供一种电动车的驻坡控制方法、电动车和可读存储介质,控制方法包括:获取永磁同步电机的位置环的位置信号;根据位置信号向永磁同步电机输出控制信号。在接收到驻坡使能信号后,则开始执行驻坡控制,并获取永磁同步电机的位置环的位置信号,当电动车处于在驻坡、溜车、再驻坡的运行状态时,溜车继而使车轮的转动,车轮的转动继而使转子发生相应的转动,继而可被位置环获知转子的转动情况,继而通过根据位置信号向永磁同步电机输出相对应的控制信号,从而可有效避免长时间同一相直流电流输出,使得电机控制器内的相应的功率管能够根据位置信号
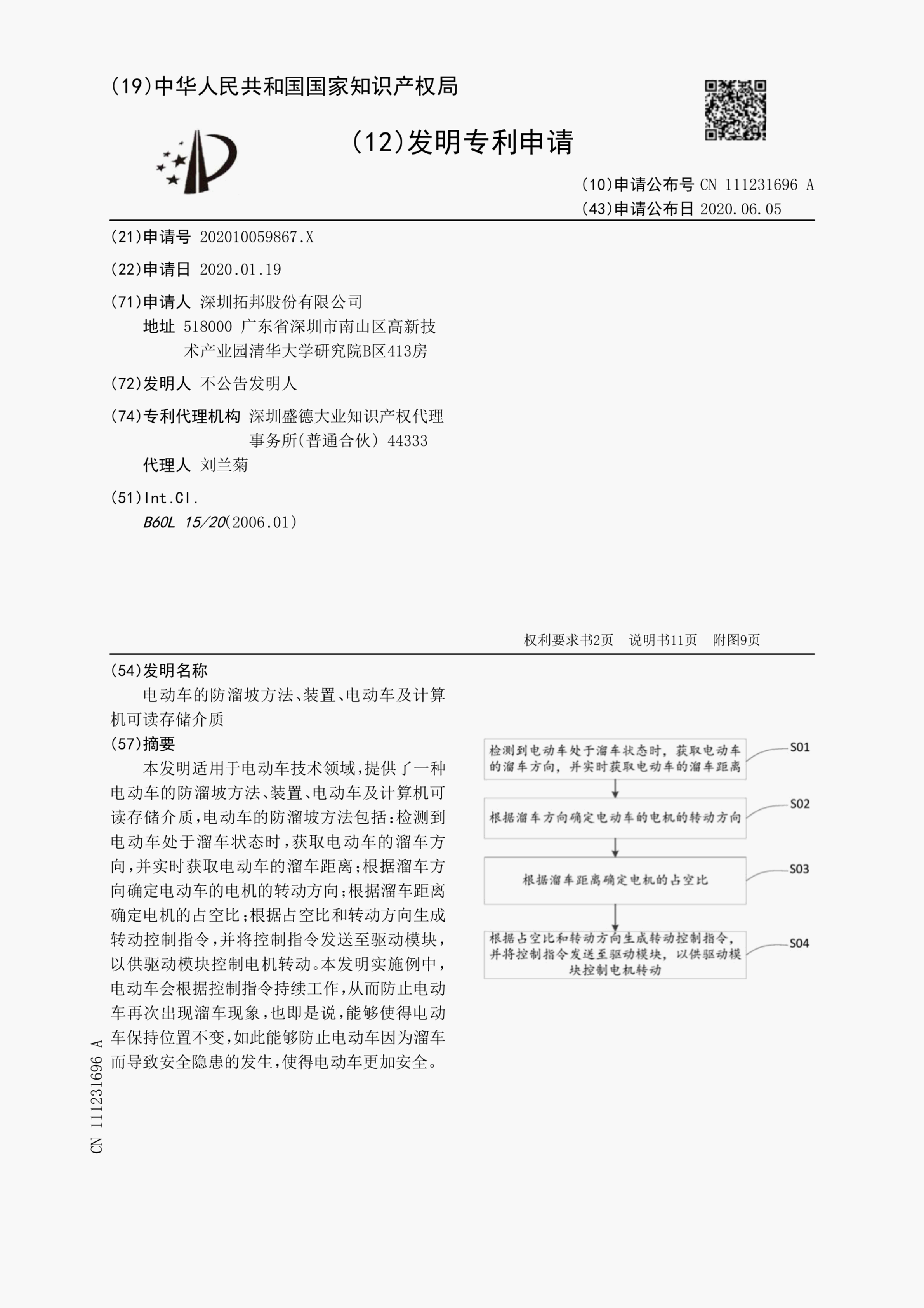
电动车的防溜坡方法、装置、电动车及计算机可读存储介质.pdf
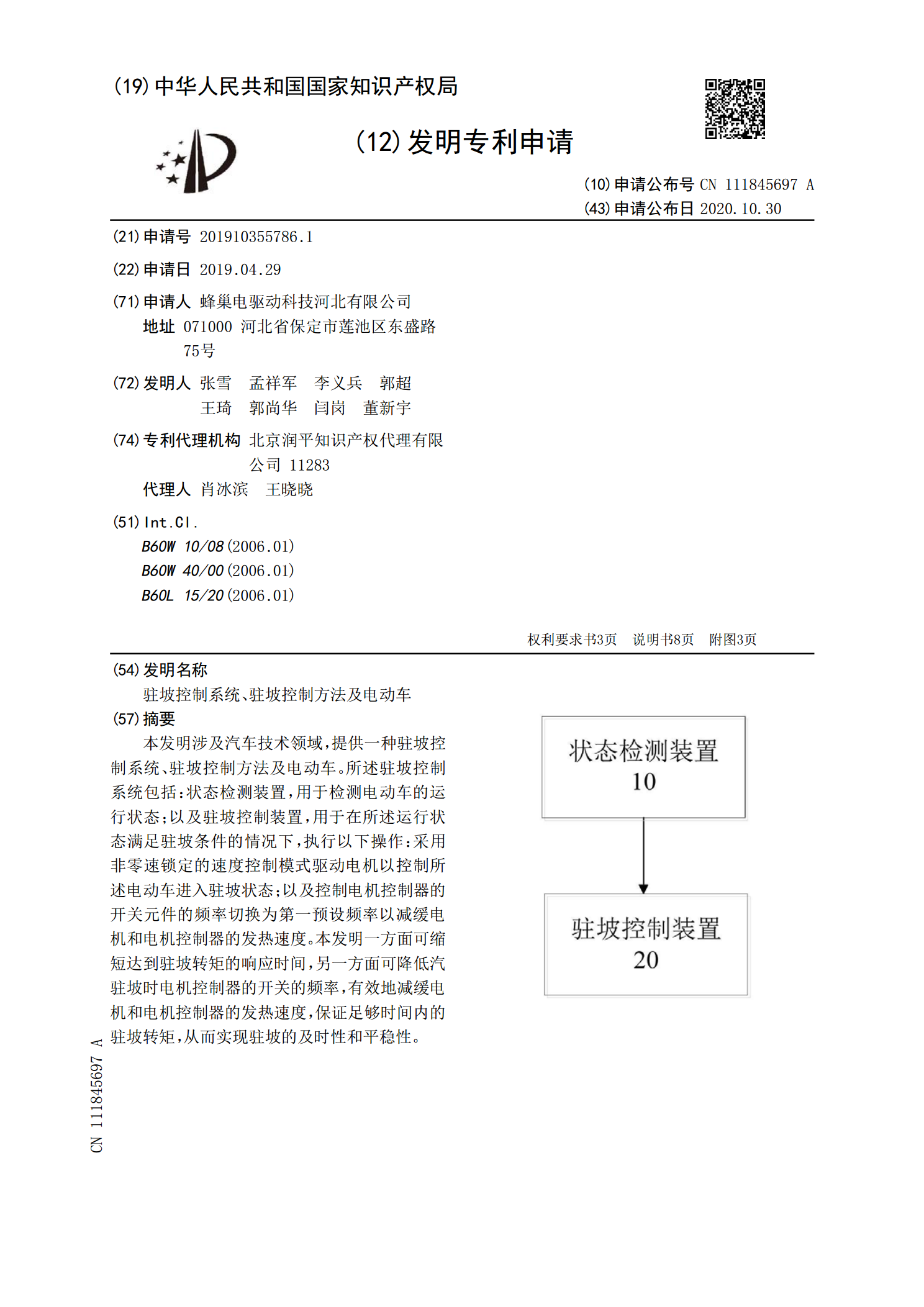
驻坡控制系统、驻坡控制方法及电动车.pdf
本发明涉及汽车技术领域,提供一种驻坡控制系统、驻坡控制方法及电动车。所述驻坡控制系统包括:状态检测装置,用于检测电动车的运行状态;以及驻坡控制装置,用于在所述运行状态满足驻坡条件的情况下,执行以下操作:采用非零速锁定的速度控制模式驱动电机以控制所述电动车进入驻坡状态;以及控制电机控制器的开关元件的频率切换为第一预设频率以减缓电机和电机控制器的发热速度。本发明一方面可缩短达到驻坡转矩的响应时间,另一方面可降低汽驻坡时电机控制器的开关的频率,有效地减缓电机和电机控制器的发热速度,保证足够时间内的驻坡转矩,从而
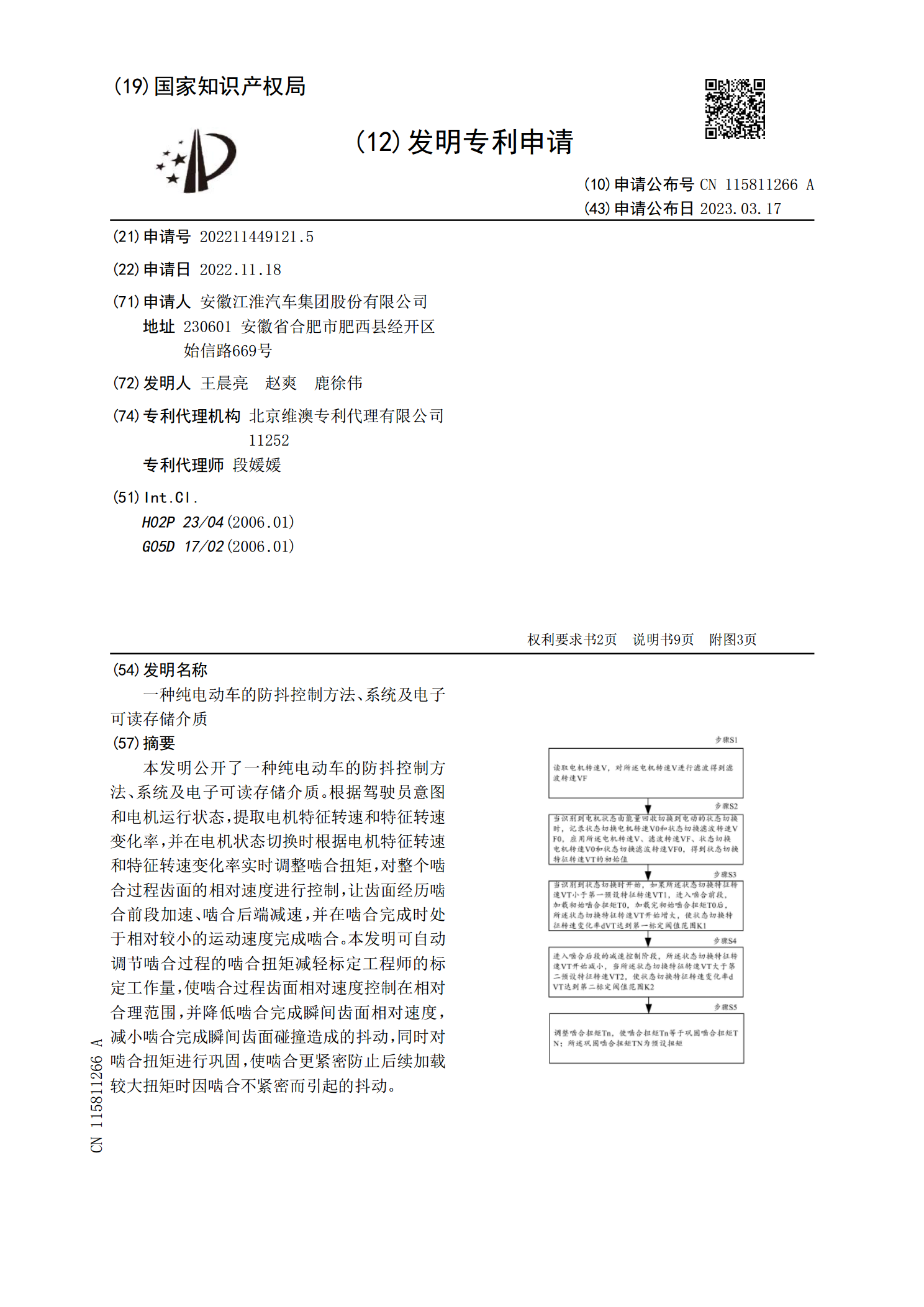
一种纯电动车的防抖控制方法、系统及电子可读存储介质.pdf
本发明公开了一种纯电动车的防抖控制方法、系统及电子可读存储介质。根据驾驶员意图和电机运行状态,提取电机特征转速和特征转速变化率,并在电机状态切换时根据电机特征转速和特征转速变化率实时调整啮合扭矩,对整个啮合过程齿面的相对速度进行控制,让齿面经历啮合前段加速、啮合后端减速,并在啮合完成时处于相对较小的运动速度完成啮合。本发明可自动调节啮合过程的啮合扭矩减轻标定工程师的标定工作量,使啮合过程齿面相对速度控制在相对合理范围,并降低啮合完成瞬间齿面相对速度,减小啮合完成瞬间齿面碰撞造成的抖动,同时对啮合扭矩进行巩
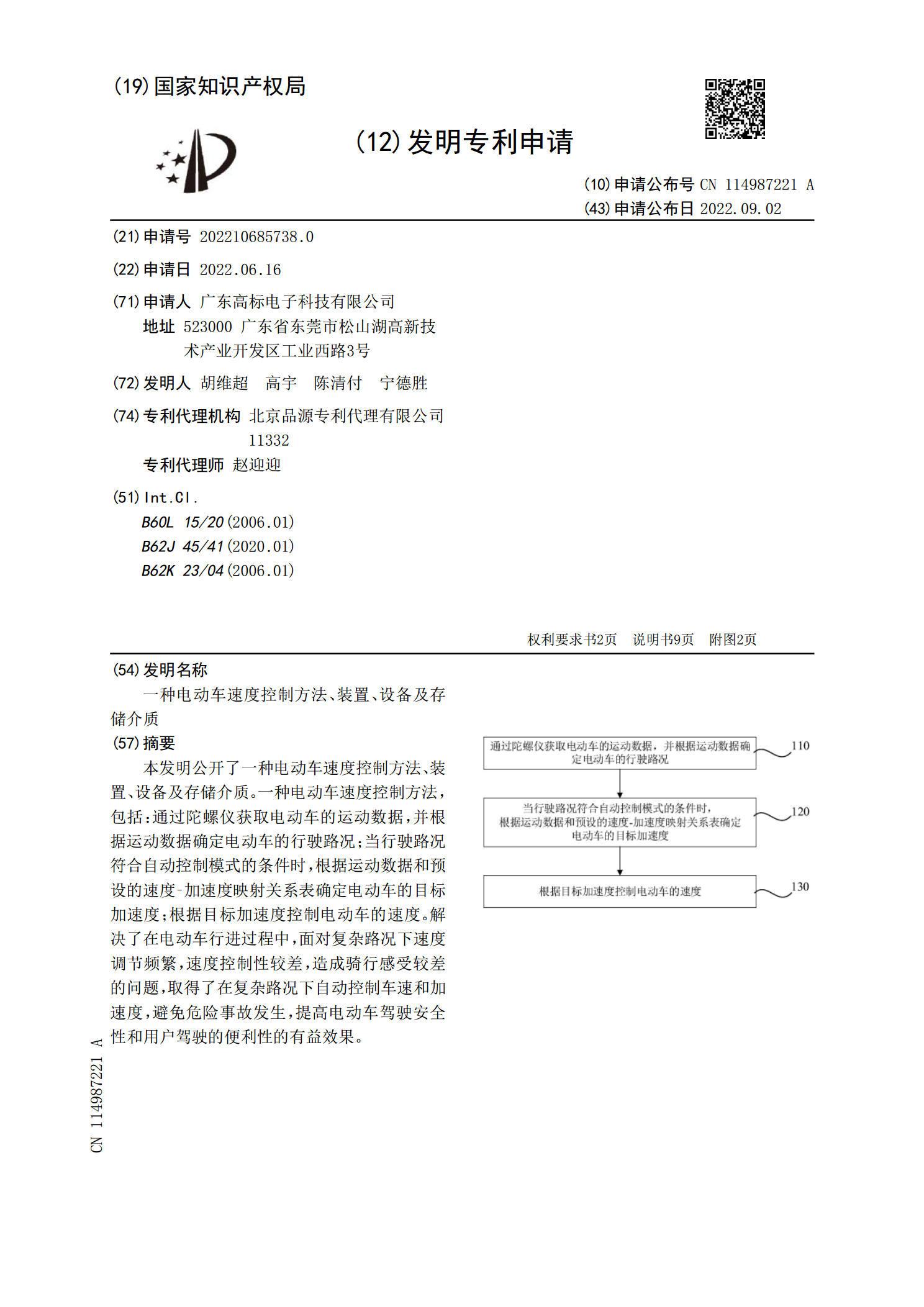
一种电动车速度控制方法、装置、设备及存储介质.pdf
本发明公开了一种电动车速度控制方法、装置、设备及存储介质。一种电动车速度控制方法,包括:通过陀螺仪获取电动车的运动数据,并根据运动数据确定电动车的行驶路况;当行驶路况符合自动控制模式的条件时,根据运动数据和预设的速度‑加速度映射关系表确定电动车的目标加速度;根据目标加速度控制电动车的速度。解决了在电动车行进过程中,面对复杂路况下速度调节频繁,速度控制性较差,造成骑行感受较差的问题,取得了在复杂路况下自动控制车速和加速度,避免危险事故发生,提高电动车驾驶安全性和用户驾驶的便利性的有益效果。