
一种无人驾驶汽车车辆间安全距离的控制系统及控制方法.pdf

兴朝****45


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种无人驾驶汽车车辆间安全距离的控制系统及控制方法.pdf
本发明公开一种无人驾驶汽车车辆间安全距离的控制系统,包括:多个图像采集装置,其分别设置在所述汽车前侧和后侧中部;辅助制动系统,其与刹车盘连接,并与刹车制动系统并联;其中,所述辅助制动系统能够与所述刹车制动系统共同制动,也能单独制动;辅助加速系统,其与车辆轮毂连接,用于辅助加速;数据采集模块,其用于检测车况和路况;数据处理模块,其与所述数据采集模块和所述图像采集装置连接,用于数据处理;控制器,其与所述数据处理模块、所述辅助制动系统和所述辅助加速系统连接,用于接收所述数据处理模块的数据并控制所述辅助制动系统和
无人驾驶车辆制动控制方法、控制系统及车辆.pdf
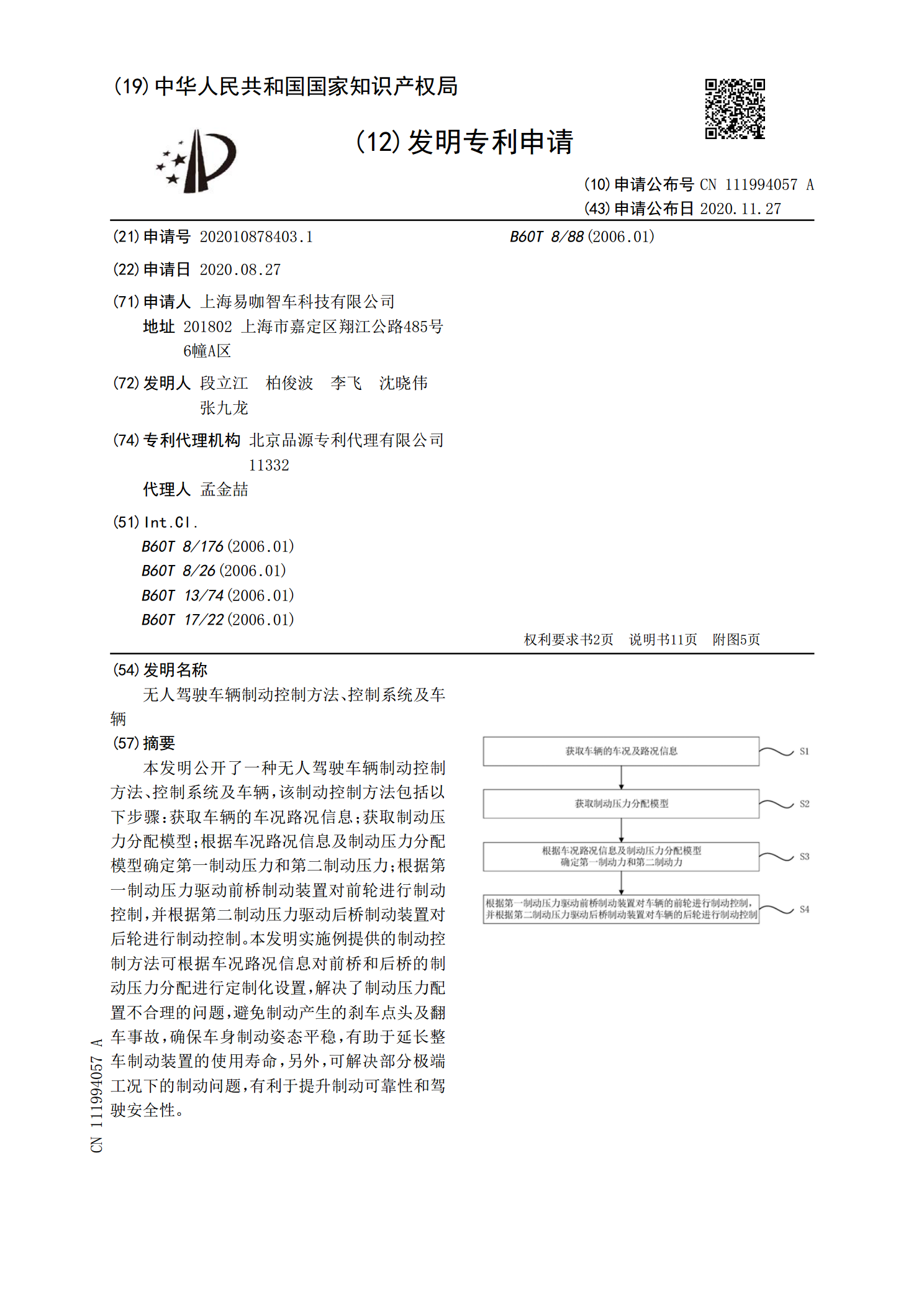
本发明公开了一种无人驾驶车辆制动控制方法、控制系统及车辆,该制动控制方法包括以下步骤:获取车辆的车况路况信息;获取制动压力分配模型;根据车况路况信息及制动压力分配模型确定第一制动压力和第二制动压力;根据第一制动压力驱动前桥制动装置对前轮进行制动控制,并根据第二制动压力驱动后桥制动装置对后轮进行制动控制。本发明实施例提供的制动控制方法可根据车况路况信息对前桥和后桥的制动压力分配进行定制化设置,解决了制动压力配置不合理的问题,避免制动产生的刹车点头及翻车事故,确保车身制动姿态平稳,有助于延长整车制动装置的使用
一种无人驾驶车辆制动控制系统及方法.pdf
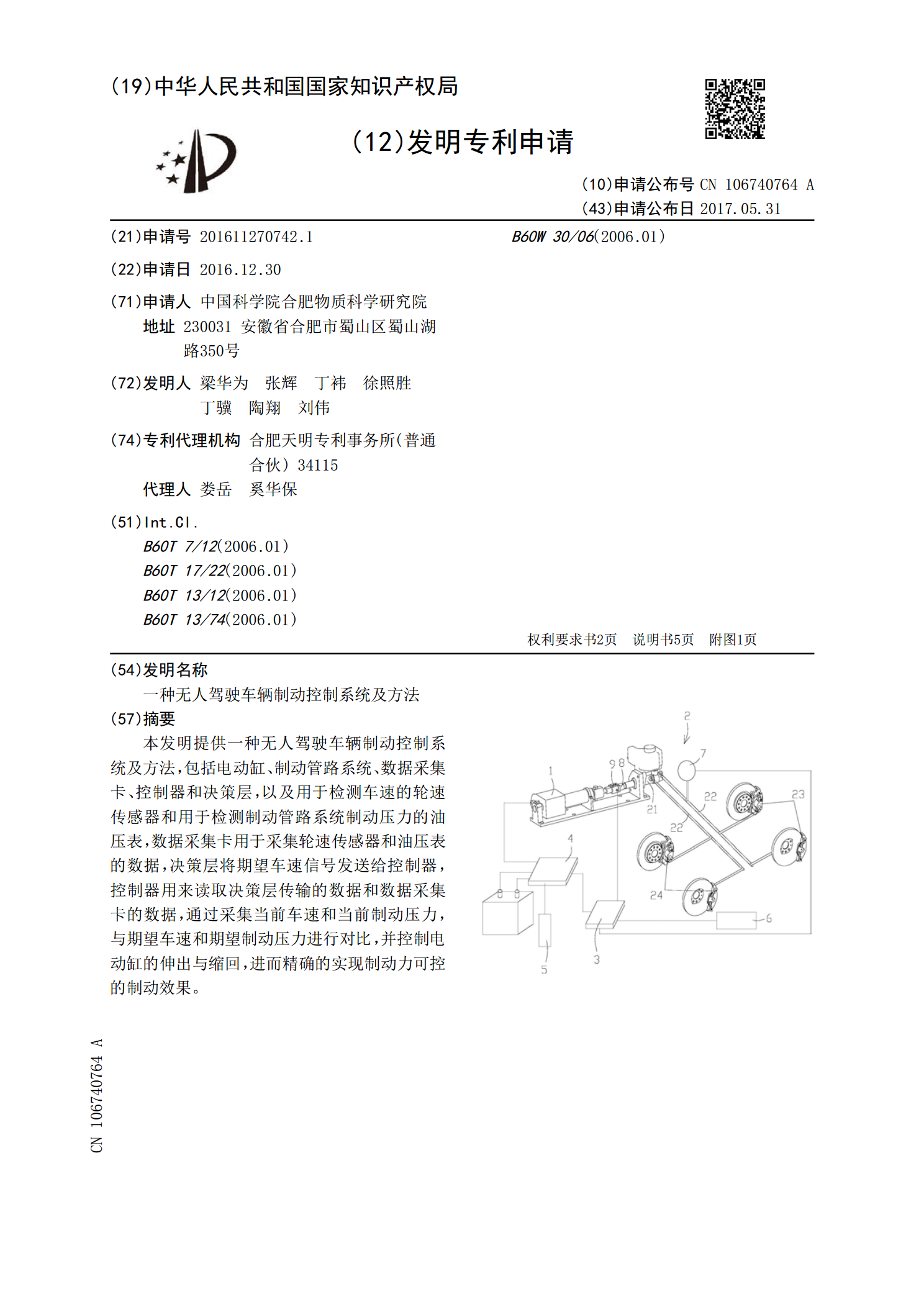
本发明提供一种无人驾驶车辆制动控制系统及方法,包括电动缸、制动管路系统、数据采集卡、控制器和决策层,以及用于检测车速的轮速传感器和用于检测制动管路系统制动压力的油压表,数据采集卡用于采集轮速传感器和油压表的数据,决策层将期望车速信号发送给控制器,控制器用来读取决策层传输的数据和数据采集卡的数据,通过采集当前车速和当前制动压力,与期望车速和期望制动压力进行对比,并控制电动缸的伸出与缩回,进而精确的实现制动力可控的制动效果。

一种汽车无人驾驶模式的控制系统及方法.pdf
本发明涉及汽车无人驾驶技术领域,公开了一种汽车无人驾驶模式的控制系统及方法,所述的控制系统包括环境感知模块、横向控制模块、纵向控制模块、中心控制模块、行为数据采集模块和决策执行模块。本发明设有的行为数据采集模块,通过CAN总线与中心控制模块和决策执行模块连接,在人工驾驶模式下接收决策执行模块的特征信息,并通过构建人工神经网络模型获取在不同行驶工况下的最佳行为参数,并将获取的最佳行为参数与执行反馈信息进行数据融合,生成具有人类驾驶特性的决策指令用于控制决策执行模块,使其控制结果及控制过程更加接近于人工驾驶模

一种车辆的控制方法、控制装置、车辆控制系统及汽车.pdf
本发明提供了一种车辆的控制方法、控制装置、车辆控制系统及汽车,该车辆控制方法包括:获取方向盘的转向信号,并根据所述转向信号确定车辆的待停车方向;获取汽车的当前挡位信息;根据所述待停车方向和所述当前挡位信息,对位于待停车方向一侧的侧视摄像头和主机显示屏上显示的图像进行控制。通过对位于待停车方向一侧的侧视摄像头采集的车辆前轮周边图像或者车辆后轮周边图像进行显示,在车辆进行倒车时,能够避免车辆后轮与路肩之间发生摩擦的风险;在不需要倒车时,通过对输出到主机显示屏上的侧视摄像头或者后视摄像头采集的图像进行显示或者关