
一种基于OS轮的轮足一体化特种六足机器人.pdf

努力****晓骞

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于OS轮的轮足一体化特种六足机器人.pdf
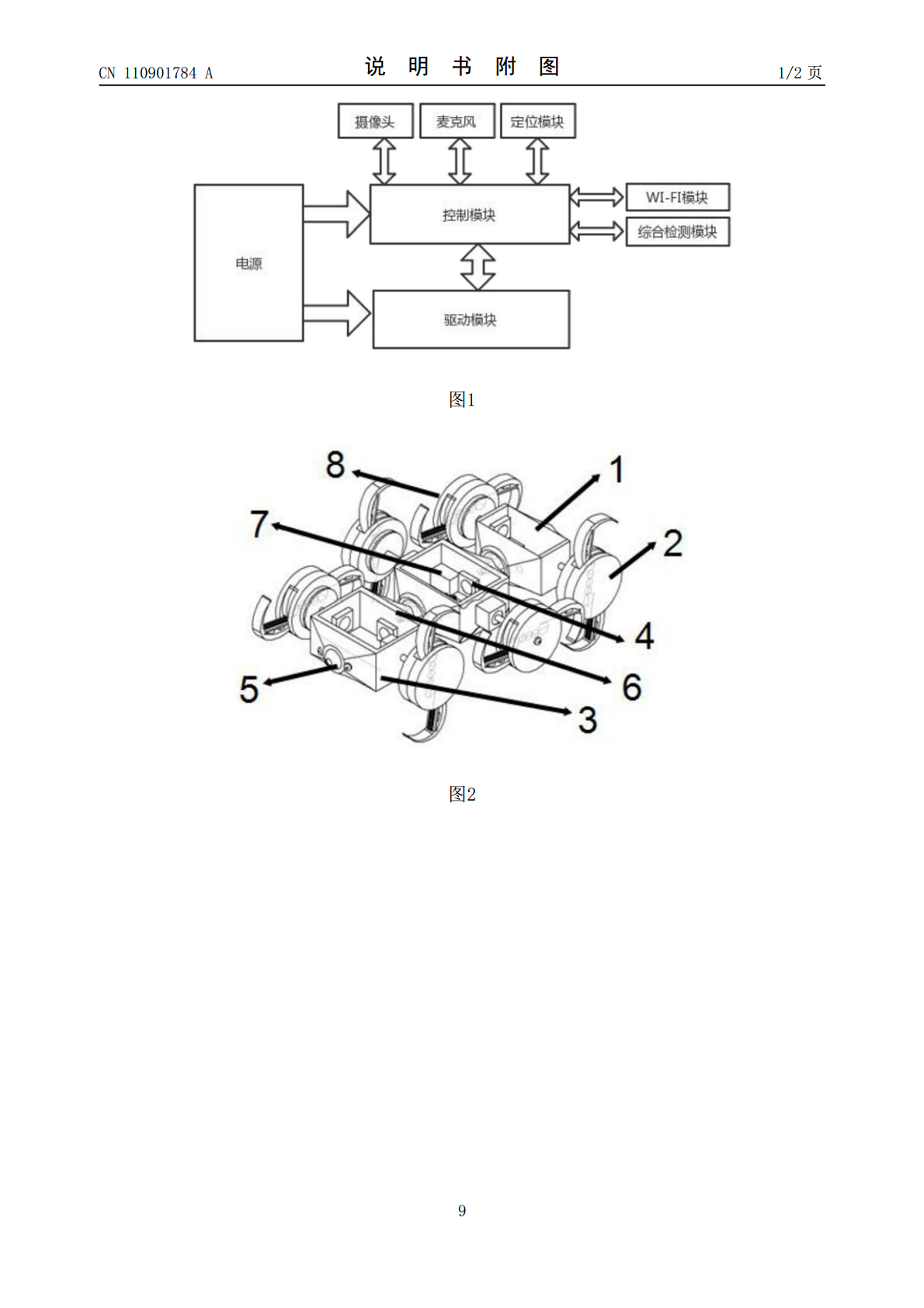
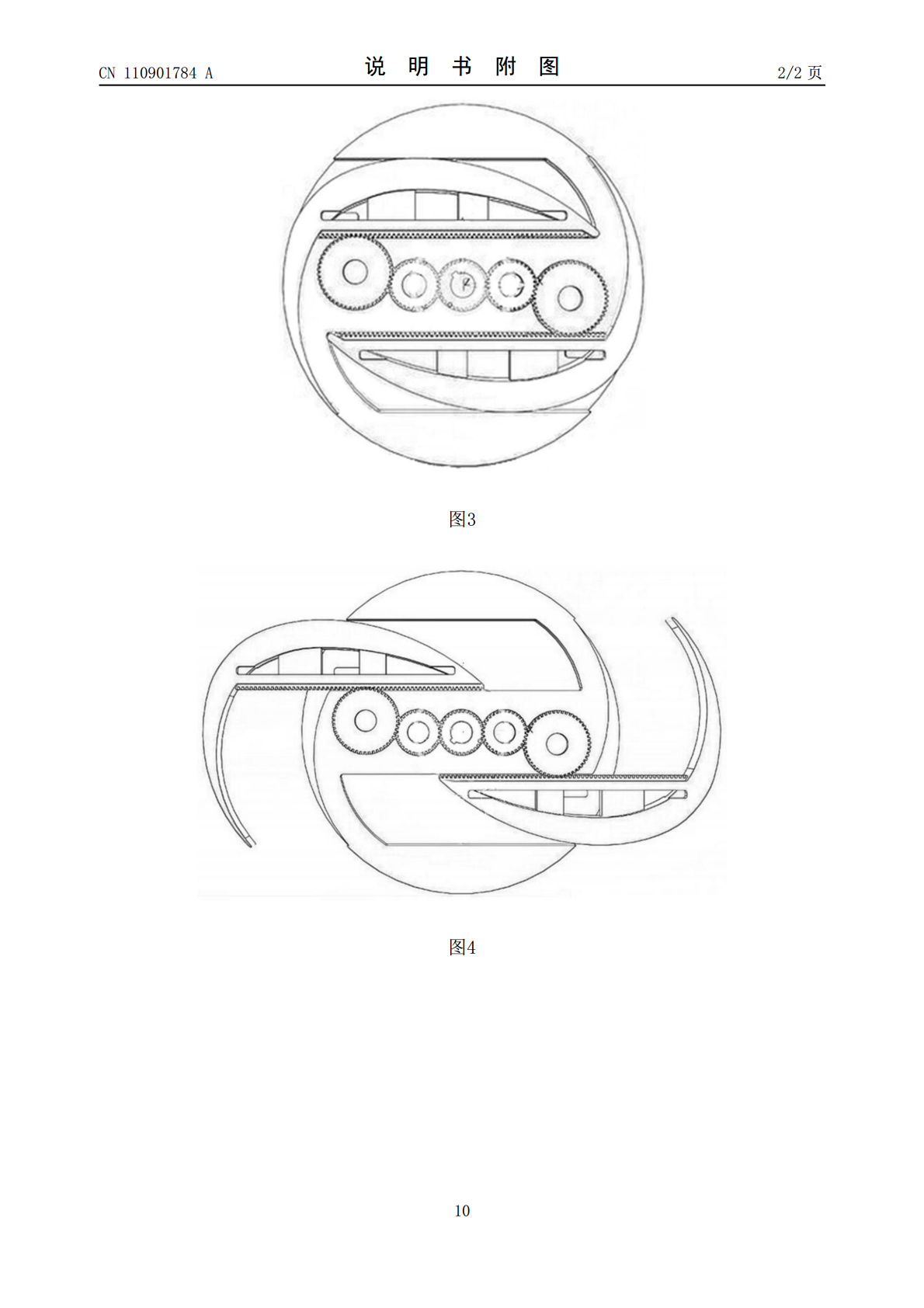
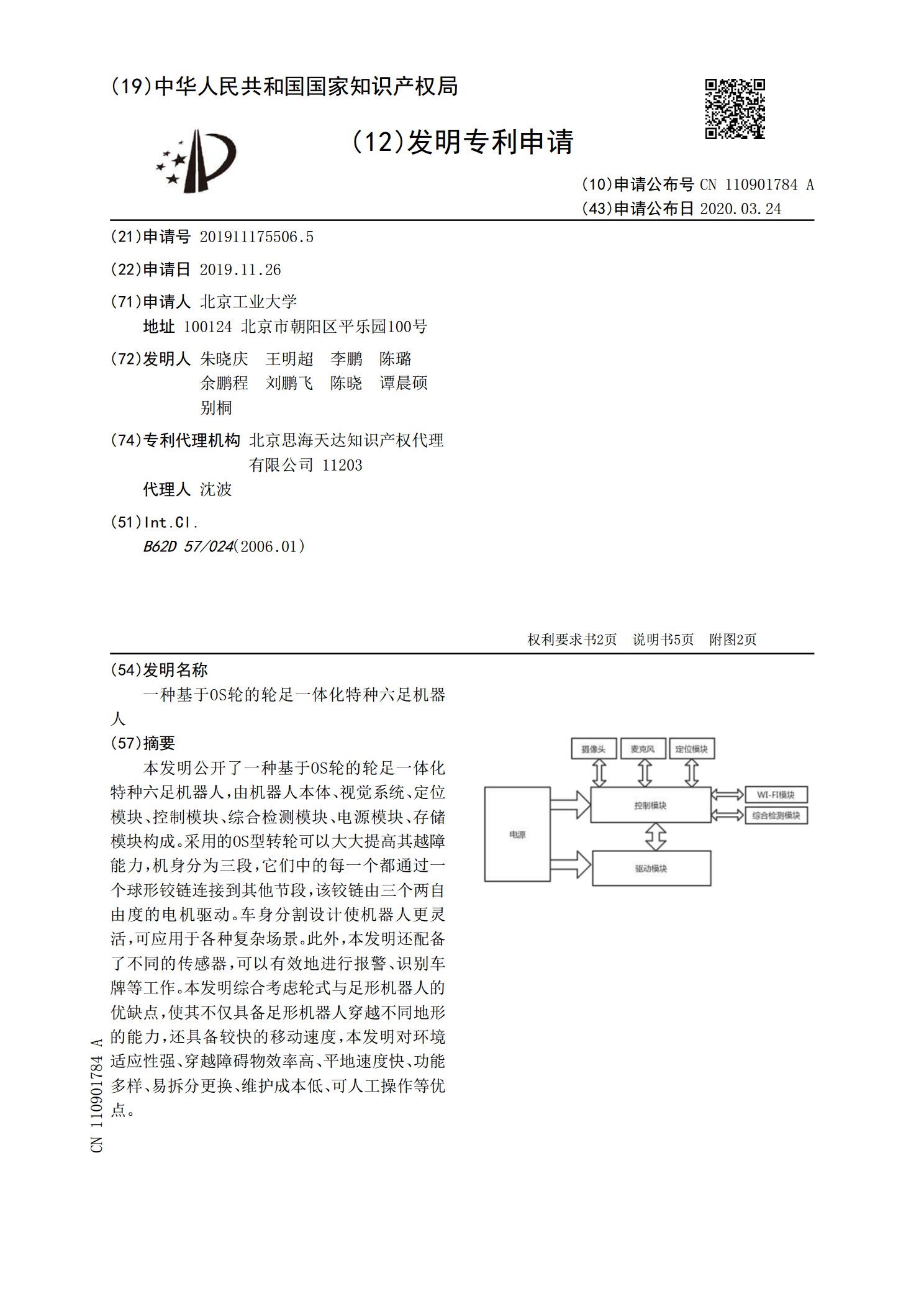
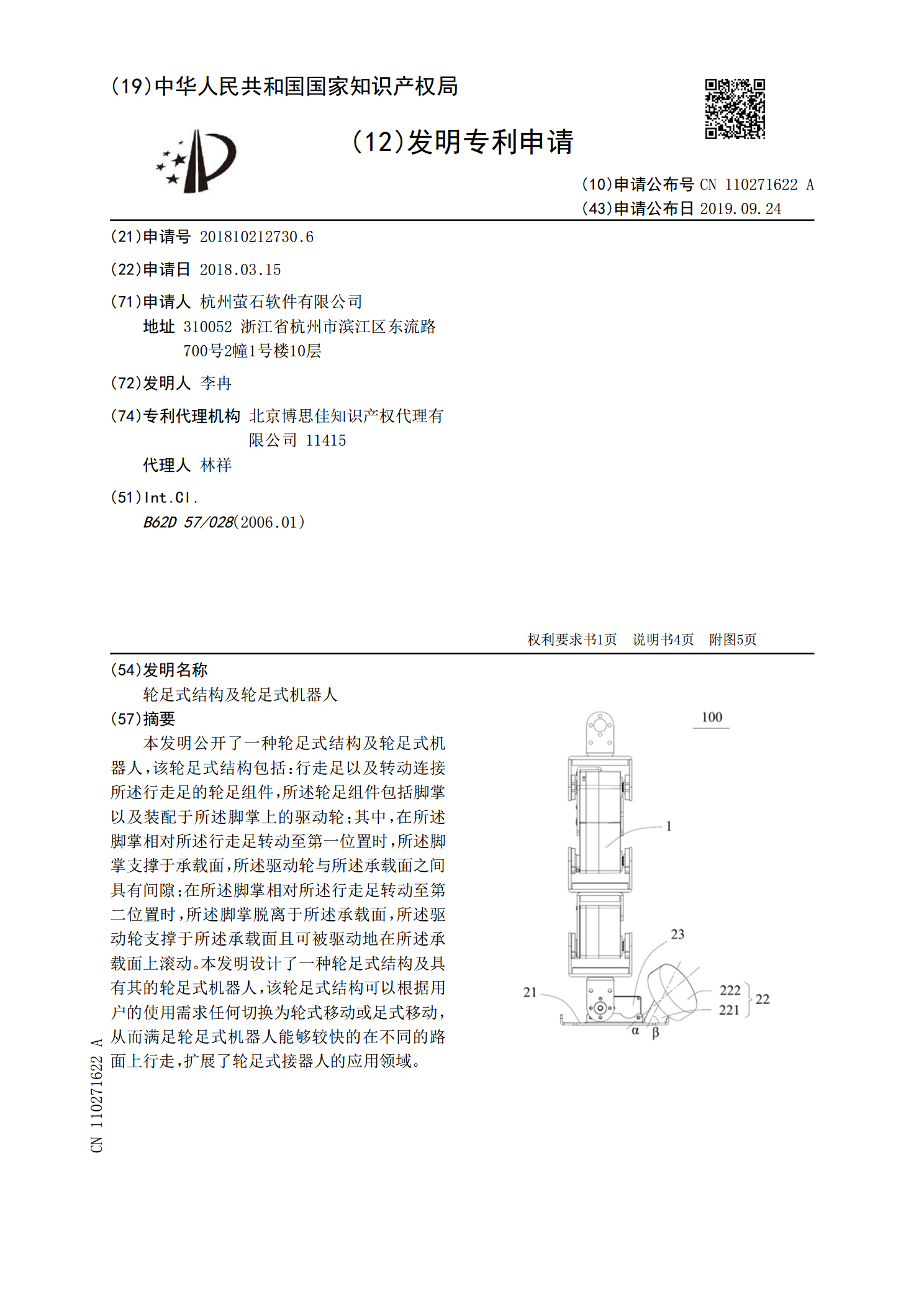
本发明公开了一种基于OS轮的轮足一体化特种六足机器人,由机器人本体、视觉系统、定位模块、控制模块、综合检测模块、电源模块、存储模块构成。采用的OS型转轮可以大大提高其越障能力,机身分为三段,它们中的每一个都通过一个球形铰链连接到其他节段,该铰链由三个两自由度的电机驱动。车身分割设计使机器人更灵活,可应用于各种复杂场景。此外,本发明还配备了不同的传感器,可以有效地进行报警、识别车牌等工作。本发明综合考虑轮式与足形机器人的优缺点,使其不仅具备足形机器人穿越不同地形的能力,还具备较快的移动速度,本发明对环境适应

一种小型轮足复合式六足机器人.pdf
本发明涉及机器人技术领域,更具体地说是一种小型轮足复合式六足机器人,该机器人具有结构紧凑,体积小的优点,能在复杂环境中行走,在平坦环境中运行效率高,且能够适用于多个领域,使用范围广。所述的L型舵机支架Ⅰ活动连接在主板的底端,舵机Ⅰ的舵机轴安装在舵机连接架上,所述的连接舵机Ⅰ的舵机连接架固定连接在L型舵机支架Ⅰ上。L型舵机支架Ⅱ与L型舵机支架Ⅰ之间固定连接,舵机Ⅱ舵机轴安装在舵机连接架上,所述的连接舵机Ⅱ的舵机连接架固定连接在L型舵机支架Ⅱ上,舵机Ⅱ安装在舵机连接板的上端。马达安装在L型马达支架上,并且马达
轮足式结构及轮足式机器人.pdf
本发明公开了一种轮足式结构及轮足式机器人,该轮足式结构包括:行走足以及转动连接所述行走足的轮足组件,所述轮足组件包括脚掌以及装配于所述脚掌上的驱动轮;其中,在所述脚掌相对所述行走足转动至第一位置时,所述脚掌支撑于承载面,所述驱动轮与所述承载面之间具有间隙;在所述脚掌相对所述行走足转动至第二位置时,所述脚掌脱离于所述承载面,所述驱动轮支撑于所述承载面且可被驱动地在所述承载面上滚动。本发明设计了一种轮足式结构及具有其的轮足式机器人,该轮足式结构可以根据用户的使用需求任何切换为轮式移动或足式移动,从而满足轮足式
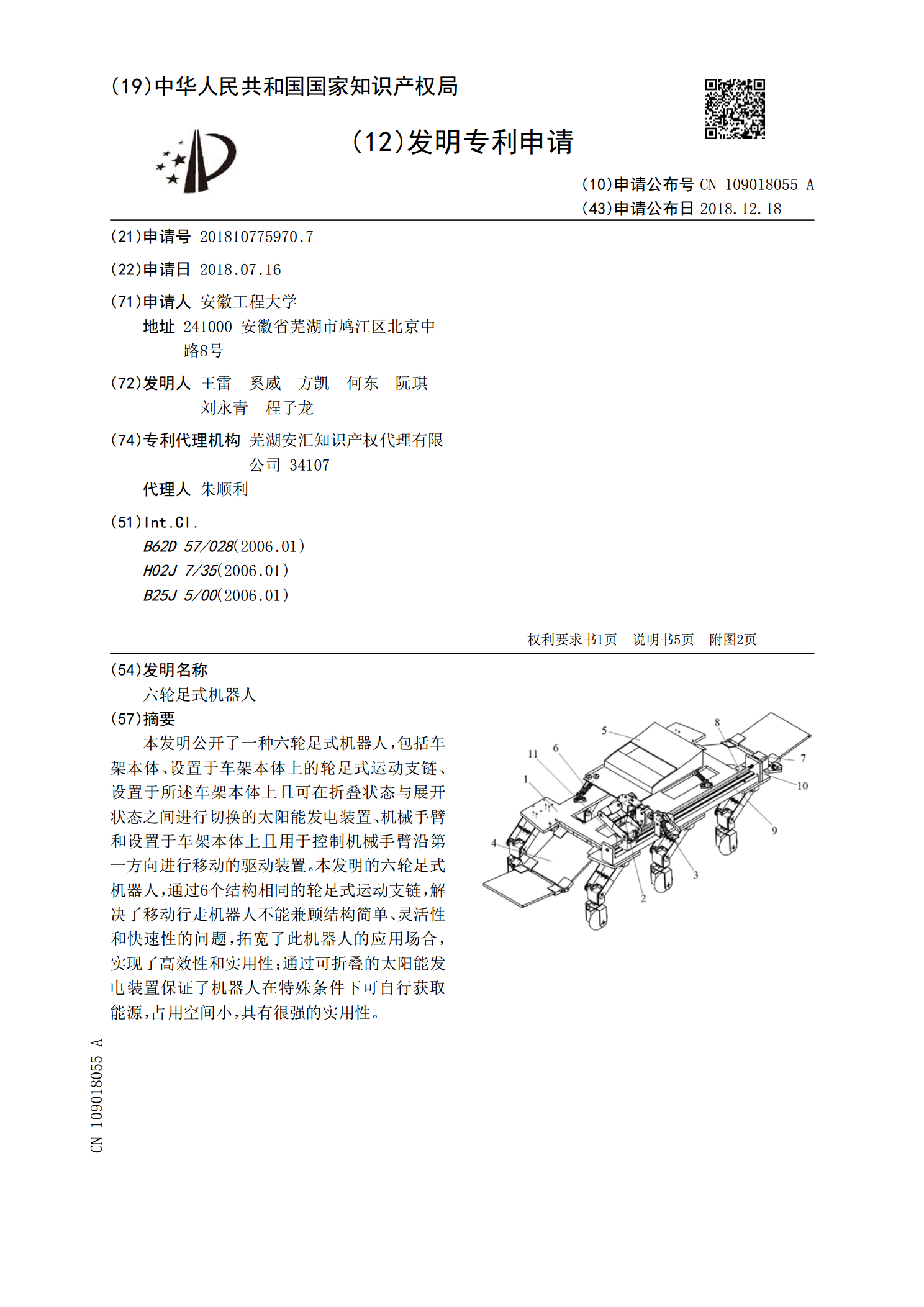
六轮足式机器人.pdf
本发明公开了一种六轮足式机器人,包括车架本体、设置于车架本体上的轮足式运动支链、设置于所述车架本体上且可在折叠状态与展开状态之间进行切换的太阳能发电装置、机械手臂和设置于车架本体上且用于控制机械手臂沿第一方向进行移动的驱动装置。本发明的六轮足式机器人,通过6个结构相同的轮足式运动支链,解决了移动行走机器人不能兼顾结构简单、灵活性和快速性的问题,拓宽了此机器人的应用场合,实现了高效性和实用性;通过可折叠的太阳能发电装置保证了机器人在特殊条件下可自行获取能源,占用空间小,具有很强的实用性。
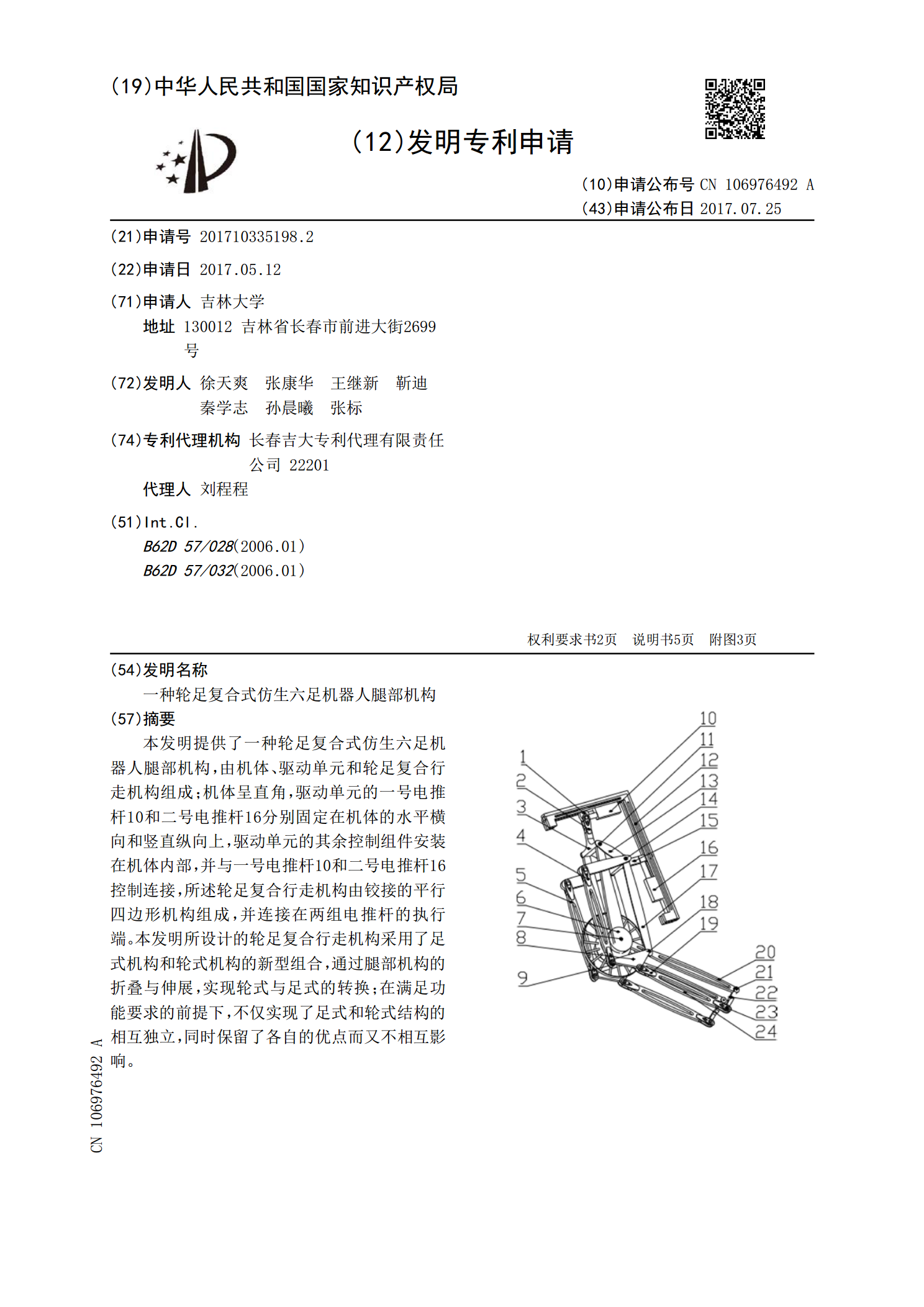
一种轮足复合式仿生六足机器人腿部机构.pdf
本发明提供了一种轮足复合式仿生六足机器人腿部机构,由机体、驱动单元和轮足复合行走机构组成;机体呈直角,驱动单元的一号电推杆10和二号电推杆16分别固定在机体的水平横向和竖直纵向上,驱动单元的其余控制组件安装在机体内部,并与一号电推杆10和二号电推杆16控制连接,所述轮足复合行走机构由铰接的平行四边形机构组成,并连接在两组电推杆的执行端。本发明所设计的轮足复合行走机构采用了足式机构和轮式机构的新型组合,通过腿部机构的折叠与伸展,实现轮式与足式的转换;在满足功能要求的前提下,不仅实现了足式和轮式结构的相互独立