
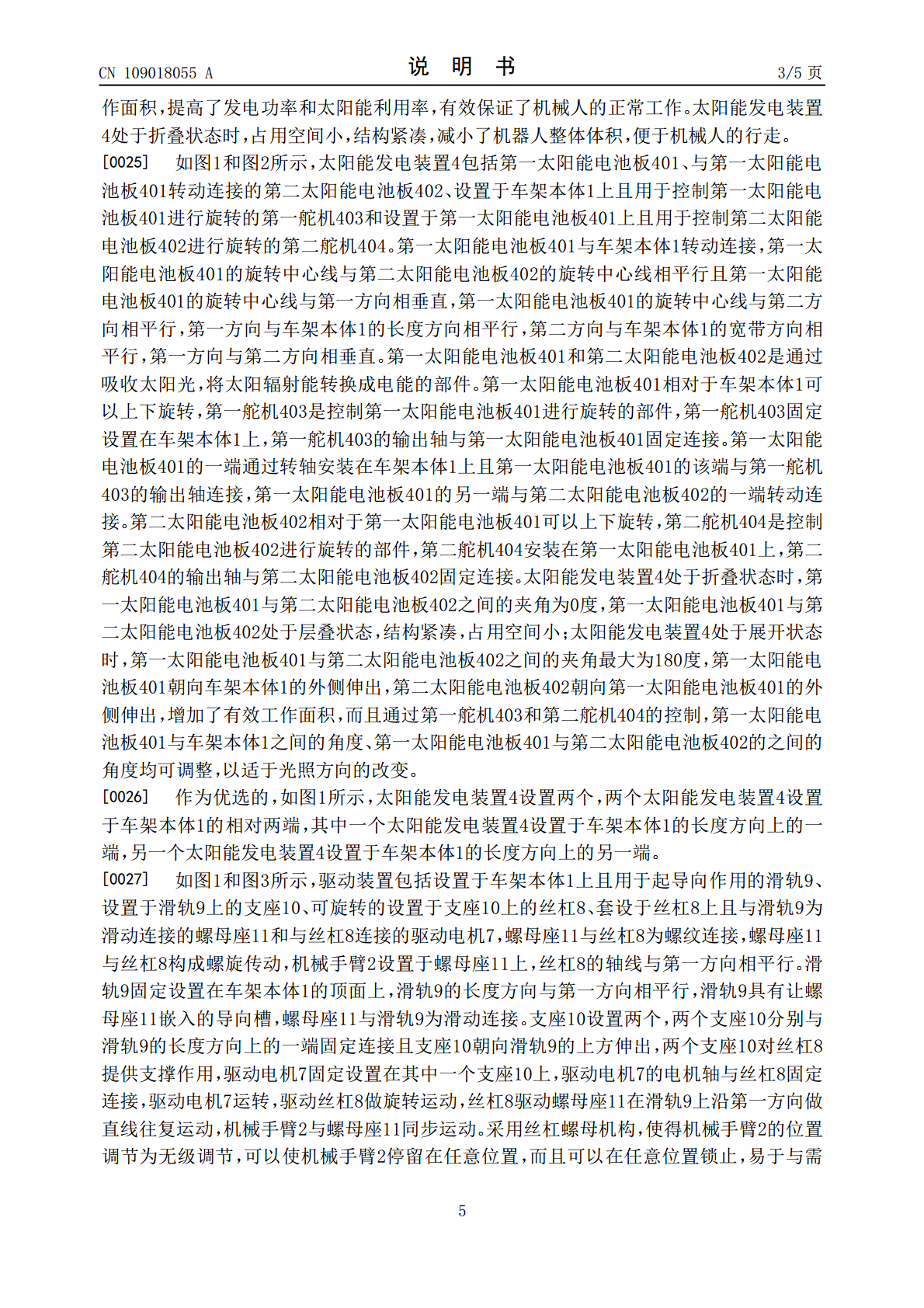
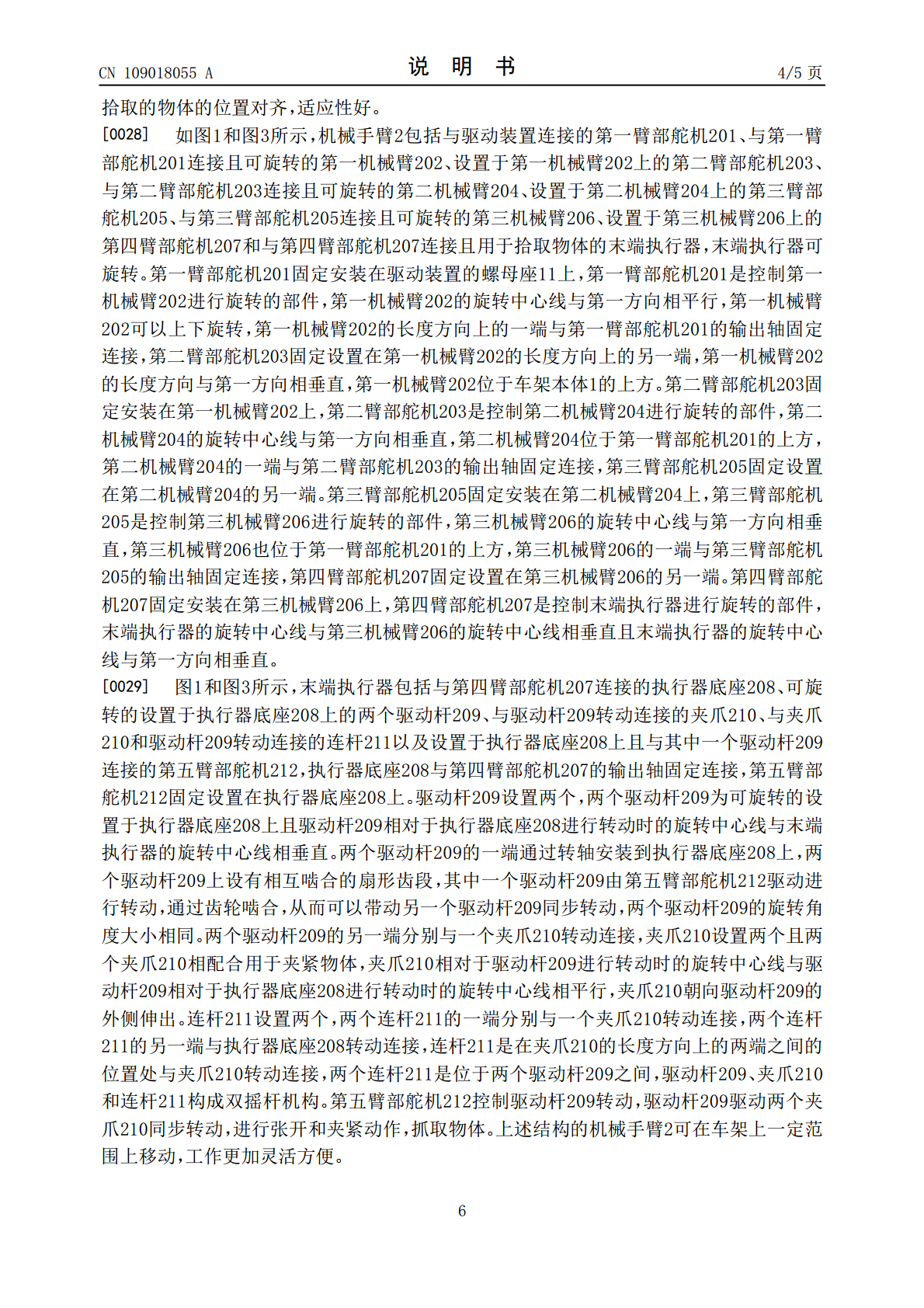
六轮足式机器人.pdf

涵蓄****09

1/9
2/9
3/9
4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
足式机器人散热系统、方法及足式机器人.pdf
本发明提供了一种足式机器人散热系统、方法及足式机器人,所述散热系统,包括:包括:水冷散热机构以及侧壳风扇散热机构;水冷散热机构,包括:水冷泵和水冷风扇,水冷风扇位于足式机器人的腔体内部以进行腔体内部电机散热,位于足式机器人腔体内部的水冷泵用于与水冷风扇连通;侧壳风扇散热机构,包括:位于腔体侧壳上的至少一个用于进行腔体侧壳元器件、腔体内部电机以及前部电机散热的腔体侧壳风扇;本发明保证了足式机器人的整体工作温度,提高了足式机器人的工作安全性。
轮足式结构及轮足式机器人.pdf
本发明公开了一种轮足式结构及轮足式机器人,该轮足式结构包括:行走足以及转动连接所述行走足的轮足组件,所述轮足组件包括脚掌以及装配于所述脚掌上的驱动轮;其中,在所述脚掌相对所述行走足转动至第一位置时,所述脚掌支撑于承载面,所述驱动轮与所述承载面之间具有间隙;在所述脚掌相对所述行走足转动至第二位置时,所述脚掌脱离于所述承载面,所述驱动轮支撑于所述承载面且可被驱动地在所述承载面上滚动。本发明设计了一种轮足式结构及具有其的轮足式机器人,该轮足式结构可以根据用户的使用需求任何切换为轮式移动或足式移动,从而满足轮足式

足端装置及足式机器人.pdf
本发明公开了一种足端装置及足式机器人,足端装置包括支撑杆、固定件和预紧组件;固定件沿第一方向设有活动孔,支撑杆的第一端位于活动孔内并能够在活动孔内活动,固定件与支撑杆之间设有防止支撑杆从活动孔脱离的限位结构,固定件的表面设有沿第二方向设置的安装通孔,第二方向与第一方向不平行,安装通孔设有至少两个并沿固定件的周向呈间隔设置;预紧组件设有至少两个并与安装通孔一一对应,预紧组件包括弹性件,弹性件的第一端通过安装通孔伸入固定件内并抵压支撑杆,弹性件的第二端与固定件固定。支撑杆能够相对固定件进行一定幅度的摆动和伸缩
腿足式机器人.pdf
一种腿足式机器人,该腿足式机器人具有:框架,该框架具有与多个支架机械连接的多个连杆,该框架形成前部、后部、顶部、底部和侧部;支腿,该支腿与多个支架中的一个或多个机械连接,每个支腿均具有膝部电机、外展电机和髋部电机;计算机模块,该计算机模块与多个支架中的一个或多个机械连接并且与支腿电性连接;以及电源模块,该电源模块与多个支架中的一个或多个机械连接并且与支腿和计算机模块电性连接。
足脚式机器人.pdf
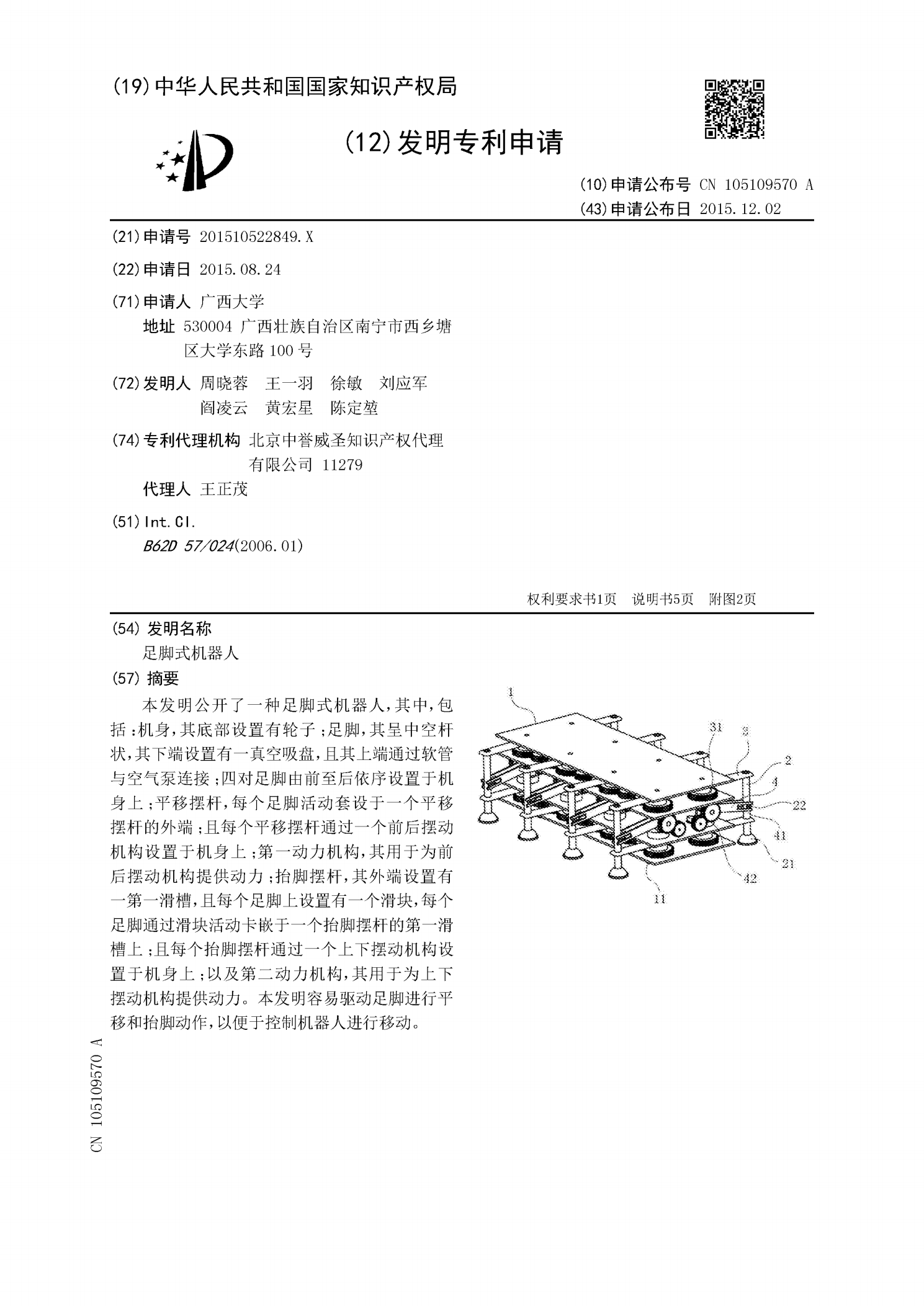
本发明公开了一种足脚式机器人,其中,包括:机身,其底部设置有轮子;足脚,其呈中空杆状,其下端设置有一真空吸盘,且其上端通过软管与空气泵连接;四对足脚由前至后依序设置于机身上;平移摆杆,每个足脚活动套设于一个平移摆杆的外端;且每个平移摆杆通过一个前后摆动机构设置于机身上;第一动力机构,其用于为前后摆动机构提供动力;抬脚摆杆,其外端设置有一第一滑槽,且每个足脚上设置有一个滑块,每个足脚通过滑块活动卡嵌于一个抬脚摆杆的第一滑槽上;且每个抬脚摆杆通过一个上下摆动机构设置于机身上;以及第二动力机构,其用于为上下摆动