
一种管道机器人传动驱动装置.pdf

纪阳****公主

1/9
2/9
3/9
4/9
5/9
6/9

7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种管道机器人传动驱动装置.pdf
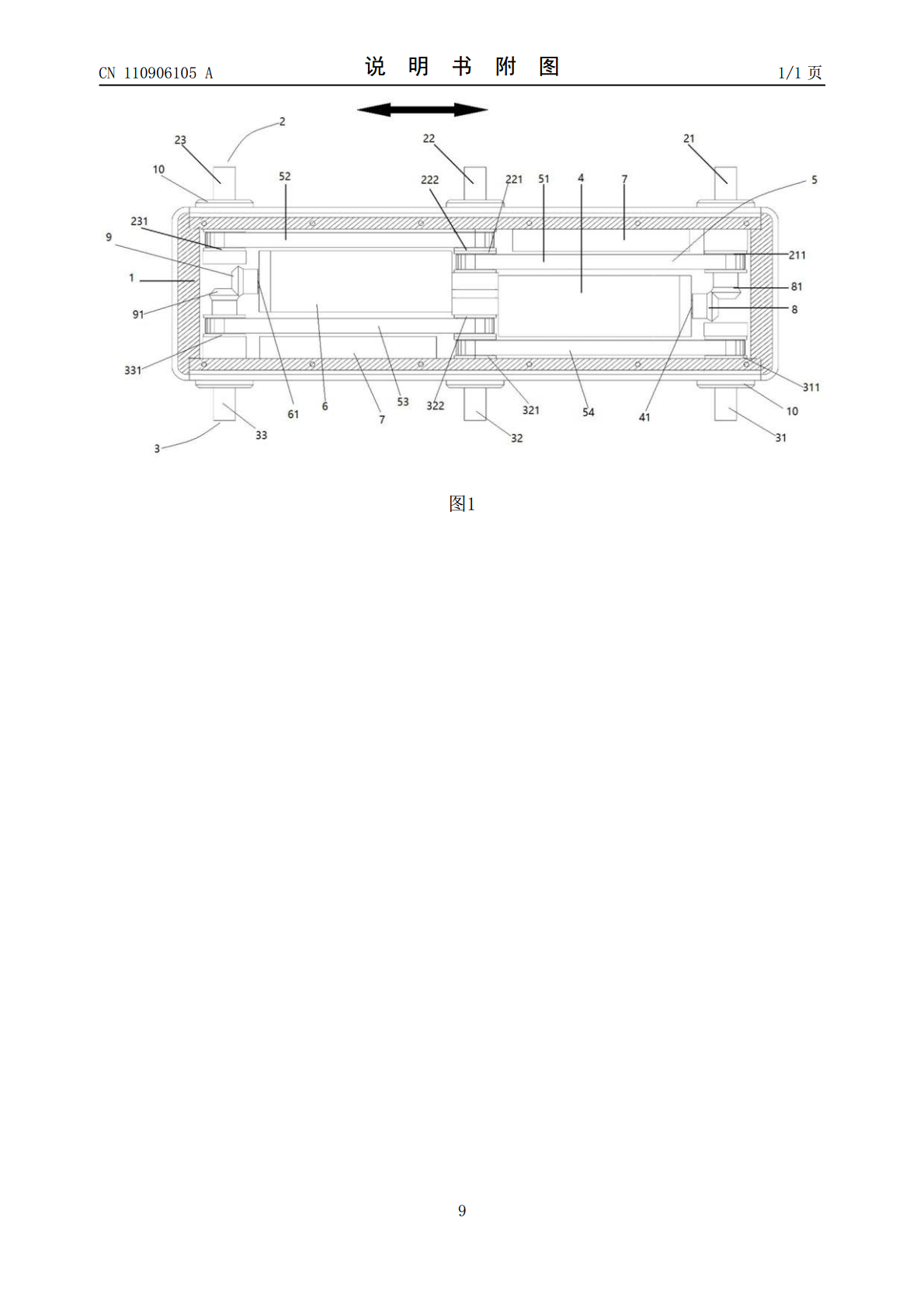
本发明提供一种管道机器人传动驱动装置,包括:外壳;第一转轴组,插设于外壳一侧壁,包括第一转轴、第二转轴和第三转轴,分别套设有车轮;第二转轴组,插设于外壳另一侧壁,包括第四转轴、第五转轴和第六转轴,分别套设有车轮;第一电机,装设于外壳内,第一输出轴与第一转轴或第三转轴传动连接,第一~第三转轴通过同步带形成同步旋转;第二电机,装设于外壳内,第二输出轴与第六转轴或第四转轴传动连接,第四~第六转轴通过同步带形成同步旋转;控制板,装设于外壳内,第一电机和第二电机分别与控制板通信连接。所述装置结构紧凑,空间占用小;传
一种管道机器人驱动装置.pdf
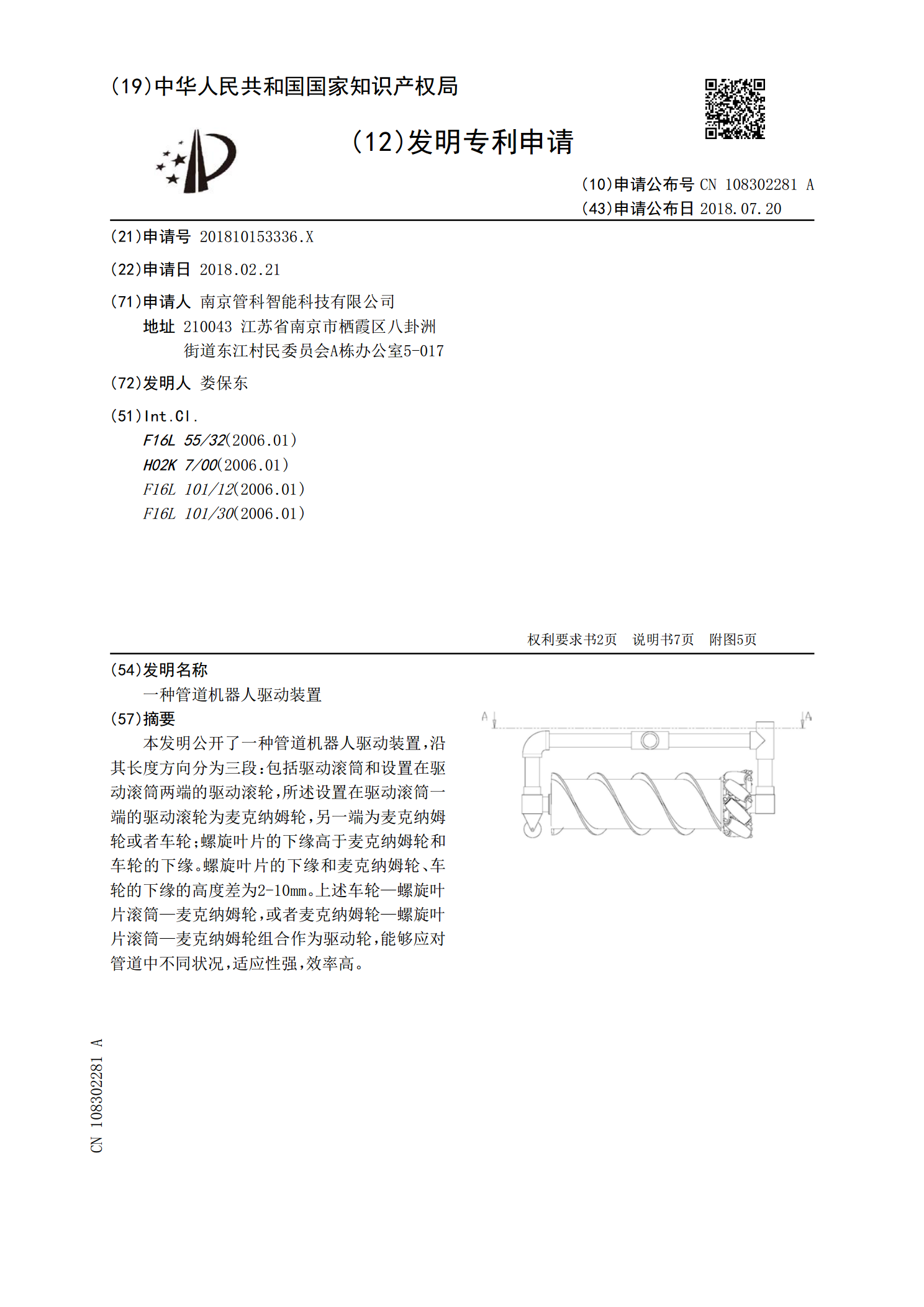
本发明公开了一种管道机器人驱动装置,沿其长度方向分为三段:包括驱动滚筒和设置在驱动滚筒两端的驱动滚轮,所述设置在驱动滚筒一端的驱动滚轮为麦克纳姆轮,另一端为麦克纳姆轮或者车轮;螺旋叶片的下缘高于麦克纳姆轮和车轮的下缘。螺旋叶片的下缘和麦克纳姆轮、车轮的下缘的高度差为2‑10mm。上述车轮—螺旋叶片滚筒—麦克纳姆轮,或者麦克纳姆轮—螺旋叶片滚筒—麦克纳姆轮组合作为驱动轮,能够应对管道中不同状况,适应性强,效率高。
一种管道机器人螺旋驱动装置及管道机器人.pdf
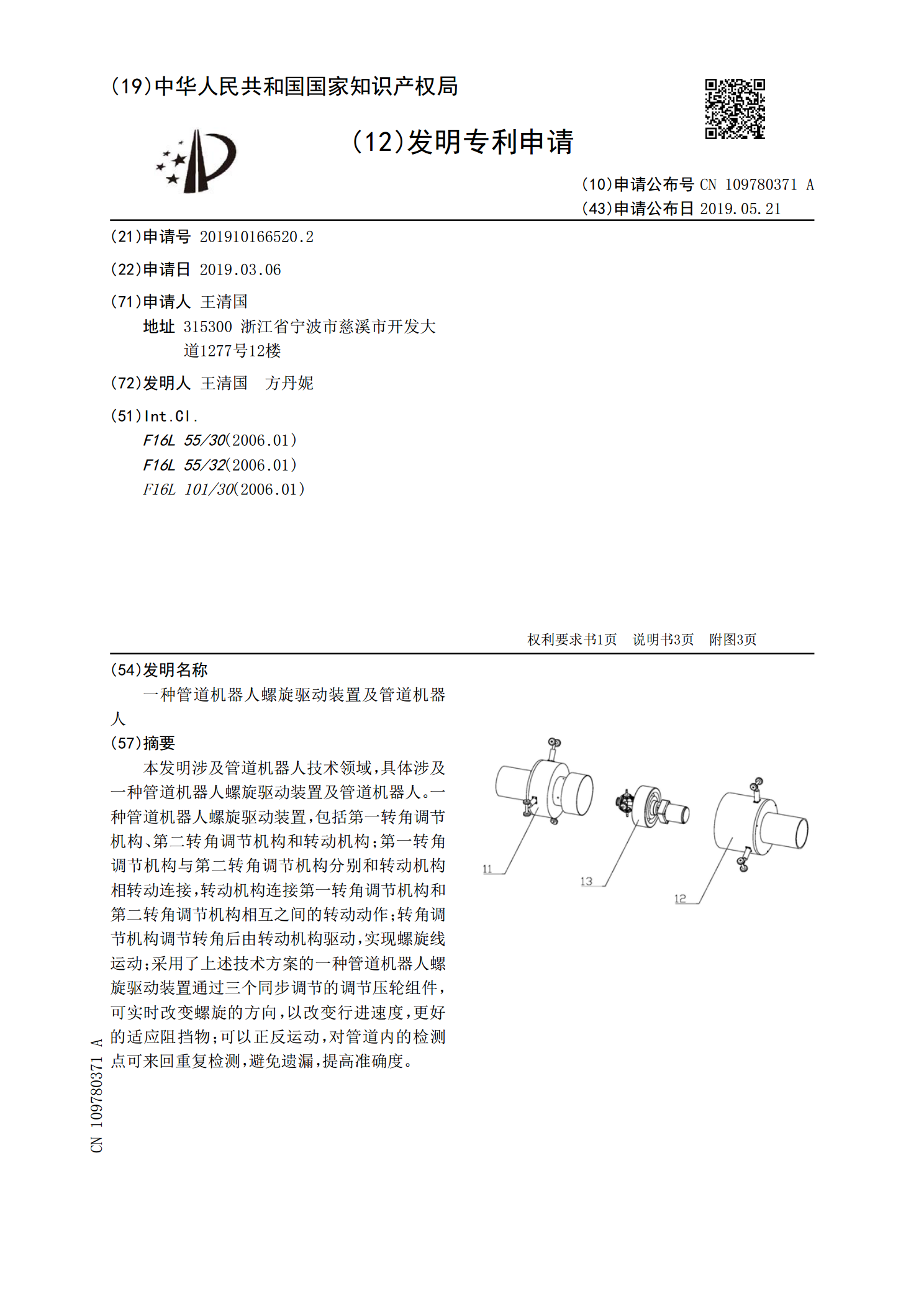
本发明涉及管道机器人技术领域,具体涉及一种管道机器人螺旋驱动装置及管道机器人。一种管道机器人螺旋驱动装置,包括第一转角调节机构、第二转角调节机构和转动机构;第一转角调节机构与第二转角调节机构分别和转动机构相转动连接,转动机构连接第一转角调节机构和第二转角调节机构相互之间的转动动作;转角调节机构调节转角后由转动机构驱动,实现螺旋线运动;采用了上述技术方案的一种管道机器人螺旋驱动装置通过三个同步调节的调节压轮组件,可实时改变螺旋的方向,以改变行进速度,更好的适应阻挡物;可以正反运动,对管道内的检测点可来回重复

一种锥齿传动管道机器人的驱动机构.pdf
本发明公开了一种锥齿传动管道机器人的驱动机构,包括驱动滚筒和设置在驱动滚筒两端的两个驱动滚轮;每个驱动滚轮包括第一锥齿轮、第二锥齿轮、第一连接件和滚轮,第一锥齿轮的一端沿轴线方向外凸起延伸形成凸台,凸台的中心沿轴线方向开设有贯穿第一锥齿轮的第一通孔;第一连接件与第一转轴固连,第一转轴上转动套设第二锥齿轮和滚轮,第一锥齿轮和第二锥齿轮啮合,第二锥齿轮与滚轮同轴固连,第二锥齿轮的半径小于滚轮的半径。通过设计成采用锥齿传动的结构,且第一锥齿轮和第二锥齿轮的齿数比为1:(1.5~5),该齿数比,具有较大扭矩,增强
管道机器人驱动装置和管道机器人.pdf
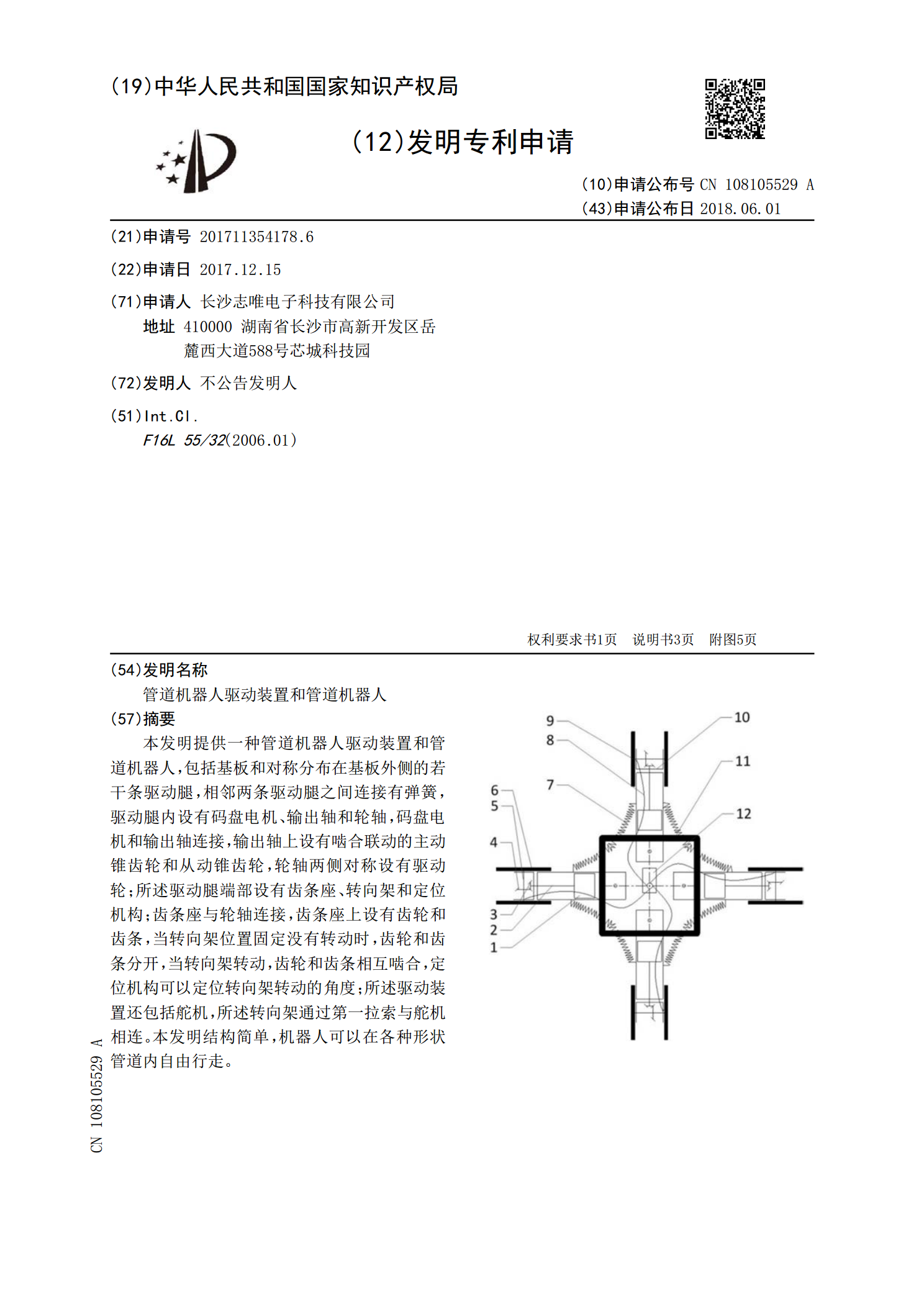
本发明提供一种管道机器人驱动装置和管道机器人,包括基板和对称分布在基板外侧的若干条驱动腿,相邻两条驱动腿之间连接有弹簧,驱动腿内设有码盘电机、输出轴和轮轴,码盘电机和输出轴连接,输出轴上设有啮合联动的主动锥齿轮和从动锥齿轮,轮轴两侧对称设有驱动轮;所述驱动腿端部设有齿条座、转向架和定位机构;齿条座与轮轴连接,齿条座上设有齿轮和齿条,当转向架位置固定没有转动时,齿轮和齿条分开,当转向架转动,齿轮和齿条相互啮合,定位机构可以定位转向架转动的角度;所述驱动装置还包括舵机,所述转向架通过第一拉索与舵机相连。本发明