
一种锥齿传动管道机器人的驱动机构.pdf

努力****晓骞


1/10

2/10

3/10

4/10

5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种锥齿传动管道机器人的驱动机构.pdf
本发明公开了一种锥齿传动管道机器人的驱动机构,包括驱动滚筒和设置在驱动滚筒两端的两个驱动滚轮;每个驱动滚轮包括第一锥齿轮、第二锥齿轮、第一连接件和滚轮,第一锥齿轮的一端沿轴线方向外凸起延伸形成凸台,凸台的中心沿轴线方向开设有贯穿第一锥齿轮的第一通孔;第一连接件与第一转轴固连,第一转轴上转动套设第二锥齿轮和滚轮,第一锥齿轮和第二锥齿轮啮合,第二锥齿轮与滚轮同轴固连,第二锥齿轮的半径小于滚轮的半径。通过设计成采用锥齿传动的结构,且第一锥齿轮和第二锥齿轮的齿数比为1:(1.5~5),该齿数比,具有较大扭矩,增强

一种锥齿传动管道机器人的主体结构.pdf
本发明公开了一种锥齿传动管道机器人的主体结构,包括支架和两个驱动装置,以及固设在支架上的控制器;每个驱动装置包括驱动滚筒和两个驱动滚轮;每个驱动滚轮包括第一锥齿轮、第二锥齿轮、第一连接件和滚轮,第一锥齿轮的一端沿轴线方向外凸起延伸形成凸台,凸台的中心沿轴线方向开设有贯穿第一锥齿轮的第一通孔;第一连接件与第一转轴固连,第一转轴上转动套设第二锥齿轮和滚轮,第一锥齿轮和第二锥齿轮啮合,第二锥齿轮与滚轮同轴固连,第二锥齿轮的半径小于滚轮的半径。通过设计成采用锥齿传动的结构,且第一锥齿轮和第二锥齿轮的齿数比为1:(

双锥齿传动机构.pdf
本发明公开了一种双锥齿传动机构,包括输入部分、差速机构和一一对应的同轴固定于差速机构的两个半轴齿轮的两个输出轴,所述输入部分与差速机构的差速体之间通过互为镜像对称的两个锥齿轮副啮合传动;本发明的双锥齿传动机构,其输入部分与差速机构的差速体之间通过互为镜像对称的两个锥齿轮副啮合传动,而该两个锥齿轮副的从动轮能够抵消轴向分力,能保证差速体轴向受力平衡,利于差速机构的运转,延长使用寿命。
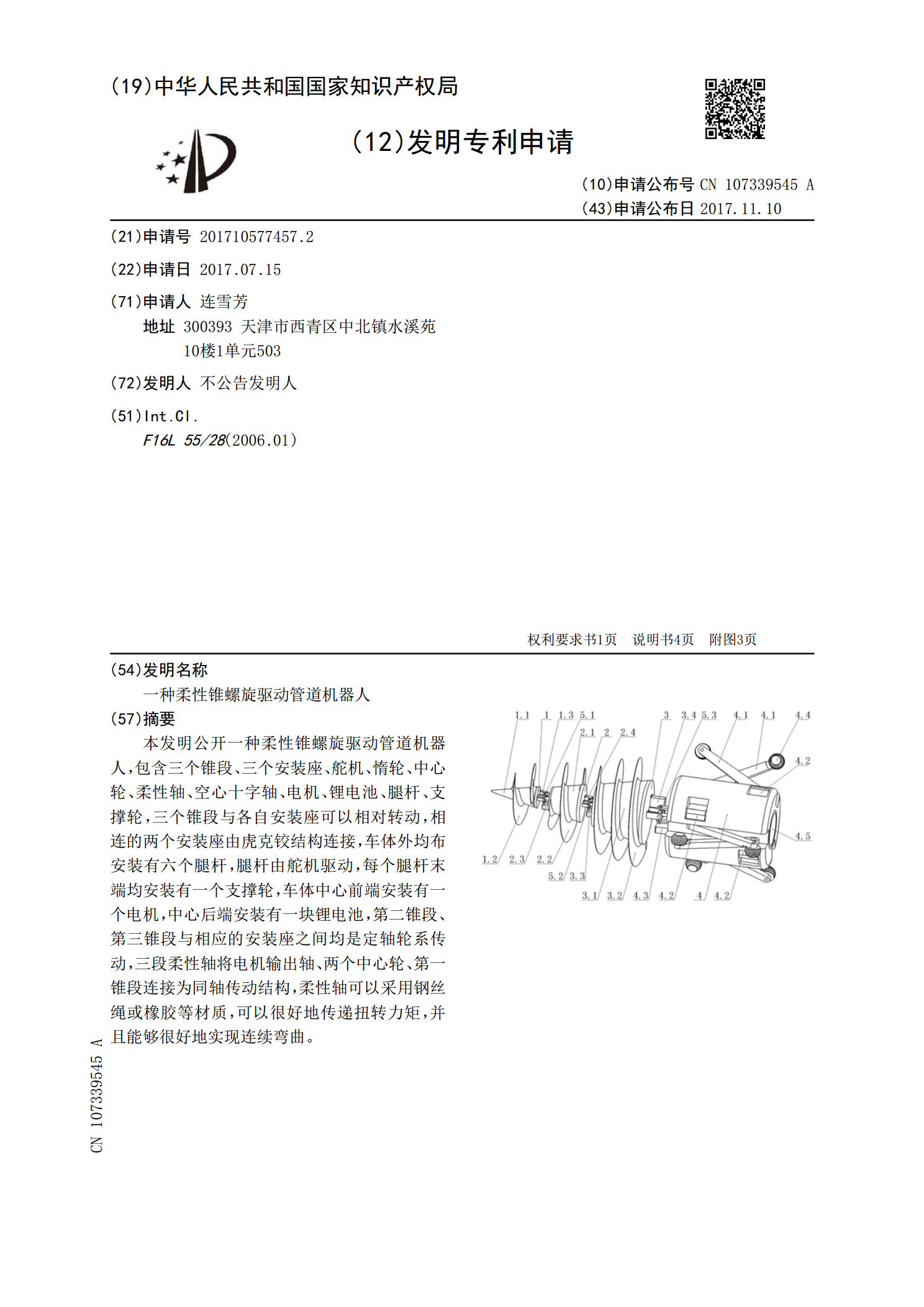
一种柔性锥螺旋驱动管道机器人.pdf
本发明公开一种柔性锥螺旋驱动管道机器人,包含三个锥段、三个安装座、舵机、惰轮、中心轮、柔性轴、空心十字轴、电机、锂电池、腿杆、支撑轮,三个锥段与各自安装座可以相对转动,相连的两个安装座由虎克铰结构连接,车体外均布安装有六个腿杆,腿杆由舵机驱动,每个腿杆末端均安装有一个支撑轮,车体中心前端安装有一个电机,中心后端安装有一块锂电池,第二锥段、第三锥段与相应的安装座之间均是定轴轮系传动,三段柔性轴将电机输出轴、两个中心轮、第一锥段连接为同轴传动结构,柔性轴可以采用钢丝绳或橡胶等材质,可以很好地传递扭转力矩,并且

一种管道机器人传动驱动装置.pdf
本发明提供一种管道机器人传动驱动装置,包括:外壳;第一转轴组,插设于外壳一侧壁,包括第一转轴、第二转轴和第三转轴,分别套设有车轮;第二转轴组,插设于外壳另一侧壁,包括第四转轴、第五转轴和第六转轴,分别套设有车轮;第一电机,装设于外壳内,第一输出轴与第一转轴或第三转轴传动连接,第一~第三转轴通过同步带形成同步旋转;第二电机,装设于外壳内,第二输出轴与第六转轴或第四转轴传动连接,第四~第六转轴通过同步带形成同步旋转;控制板,装设于外壳内,第一电机和第二电机分别与控制板通信连接。所述装置结构紧凑,空间占用小;传