
一种割草机器人.pdf

俊凤****bb

1/6
2/6
3/6
4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种割草机器人路径规划方法及割草机器人.pdf
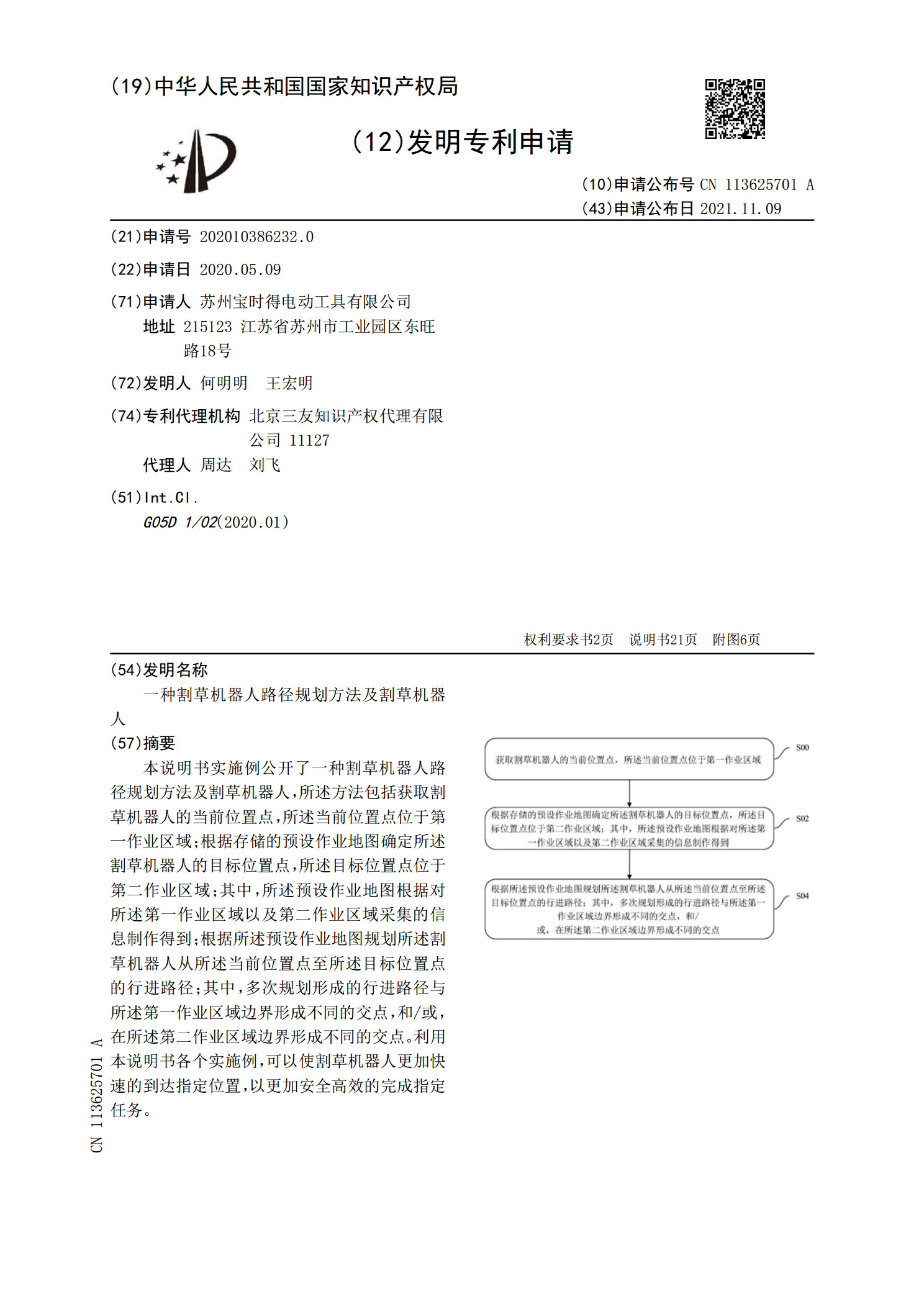
本说明书实施例公开了一种割草机器人路径规划方法及割草机器人,所述方法包括获取割草机器人的当前位置点,所述当前位置点位于第一作业区域;根据存储的预设作业地图确定所述割草机器人的目标位置点,所述目标位置点位于第二作业区域;其中,所述预设作业地图根据对所述第一作业区域以及第二作业区域采集的信息制作得到;根据所述预设作业地图规划所述割草机器人从所述当前位置点至所述目标位置点的行进路径;其中,多次规划形成的行进路径与所述第一作业区域边界形成不同的交点,和/或,在所述第二作业区域边界形成不同的交点。利用本说明书各个实
一种割草机器人.pdf
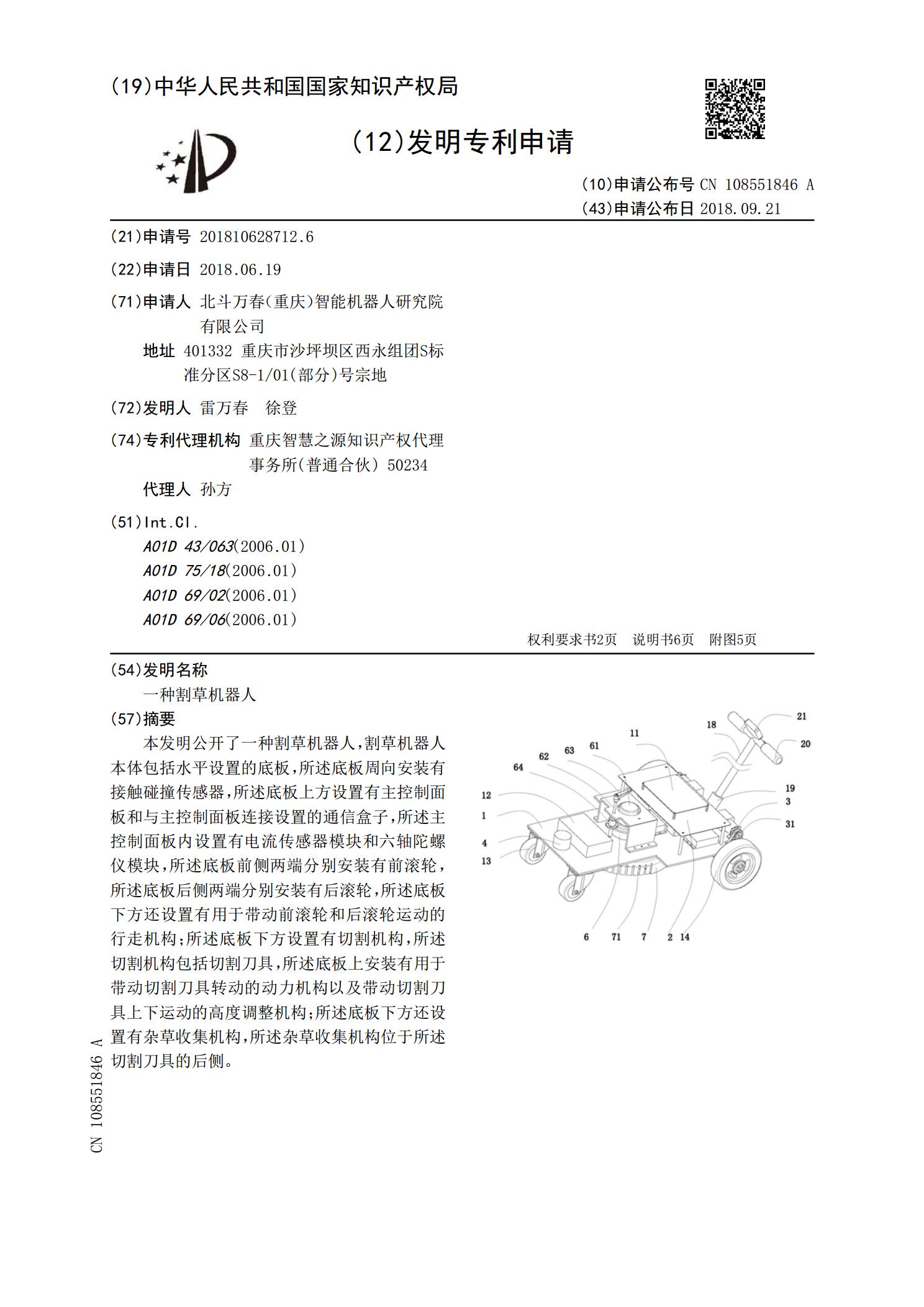
本发明公开了一种割草机器人,割草机器人本体包括水平设置的底板,所述底板周向安装有接触碰撞传感器,所述底板上方设置有主控制面板和与主控制面板连接设置的通信盒子,所述主控制面板内设置有电流传感器模块和六轴陀螺仪模块,所述底板前侧两端分别安装有前滚轮,所述底板后侧两端分别安装有后滚轮,所述底板下方还设置有用于带动前滚轮和后滚轮运动的行走机构;所述底板下方设置有切割机构,所述切割机构包括切割刀具,所述底板上安装有用于带动切割刀具转动的动力机构以及带动切割刀具上下运动的高度调整机构;所述底板下方还设置有杂草收集机构
一种割草机器人.pdf
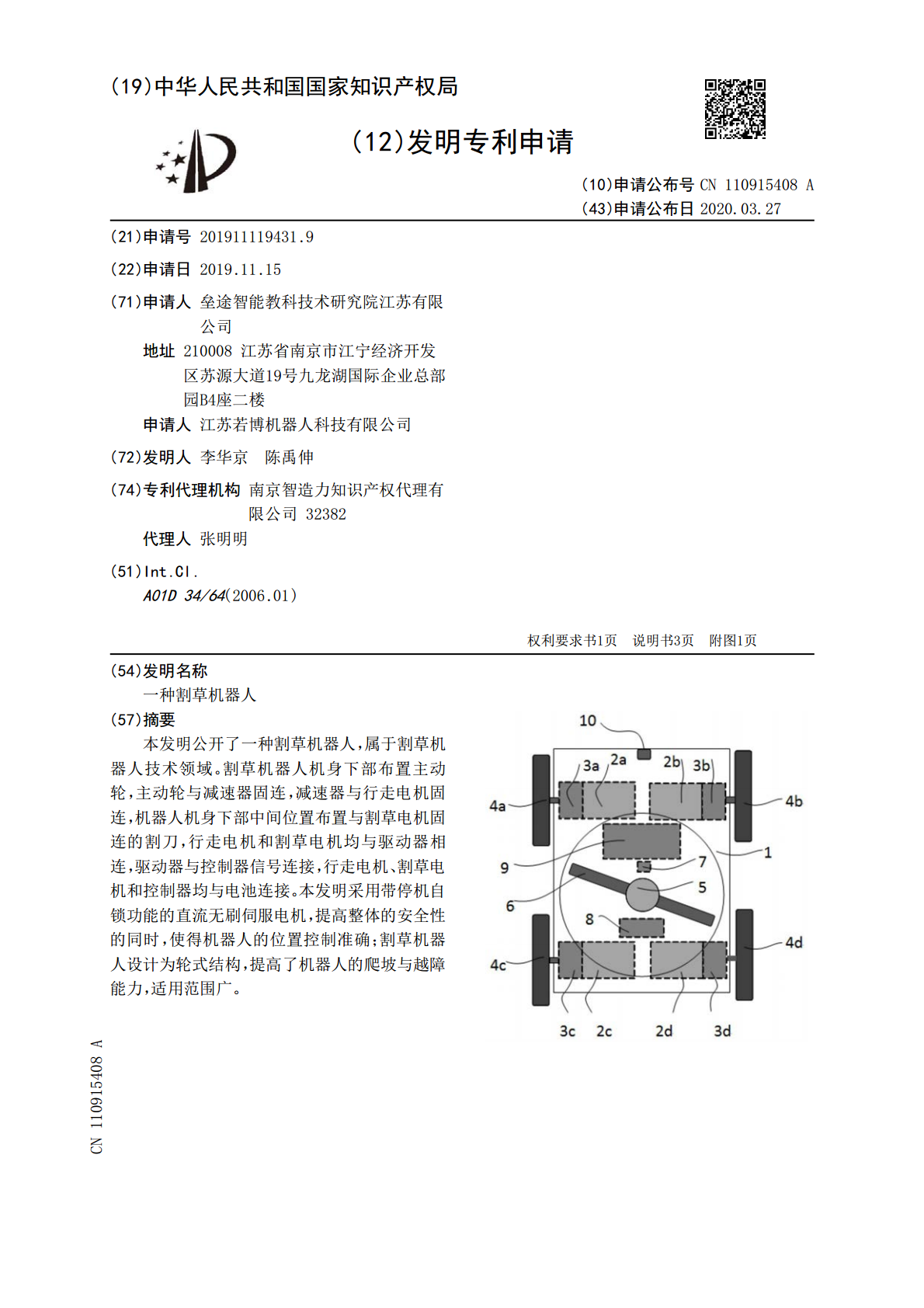
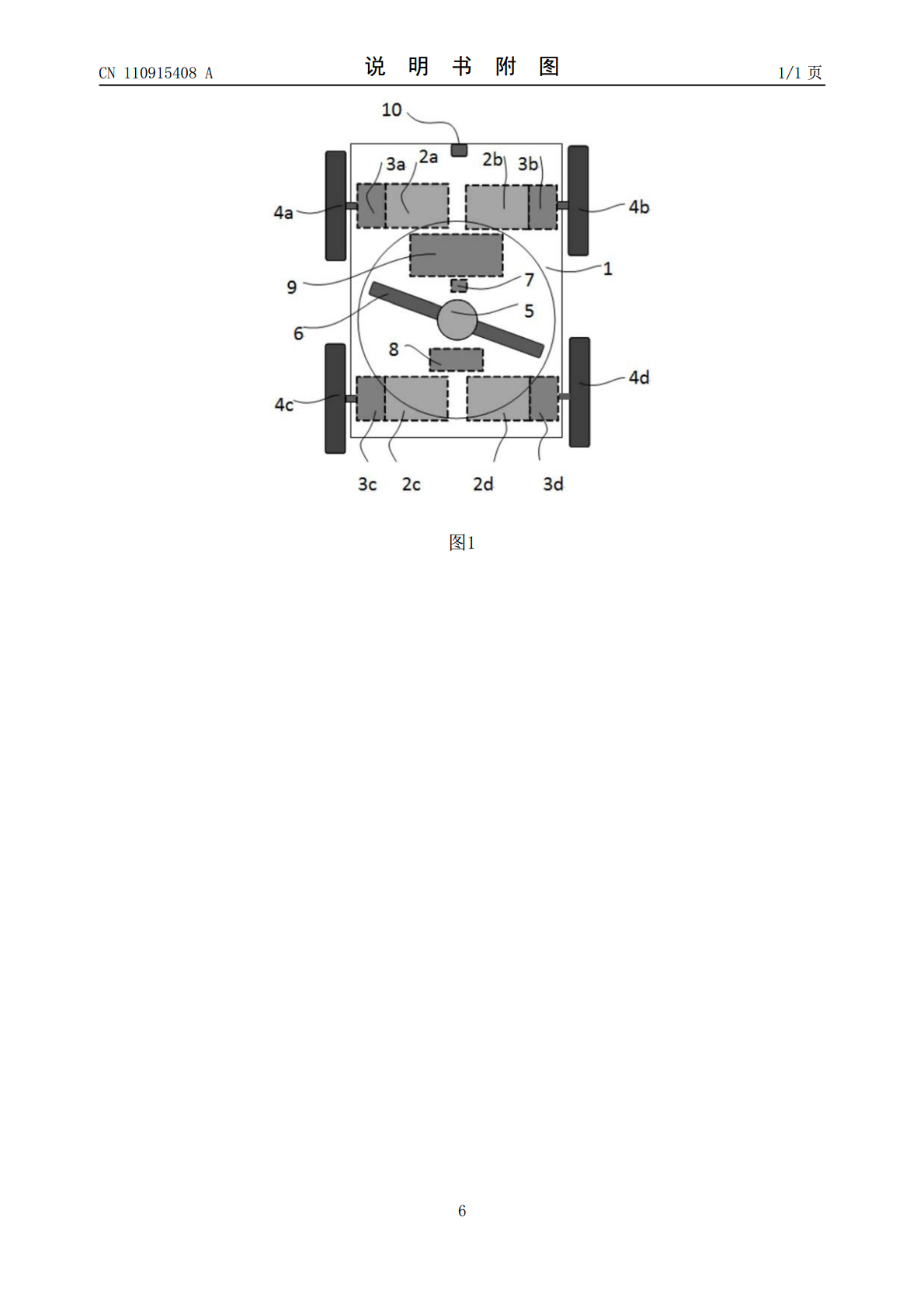
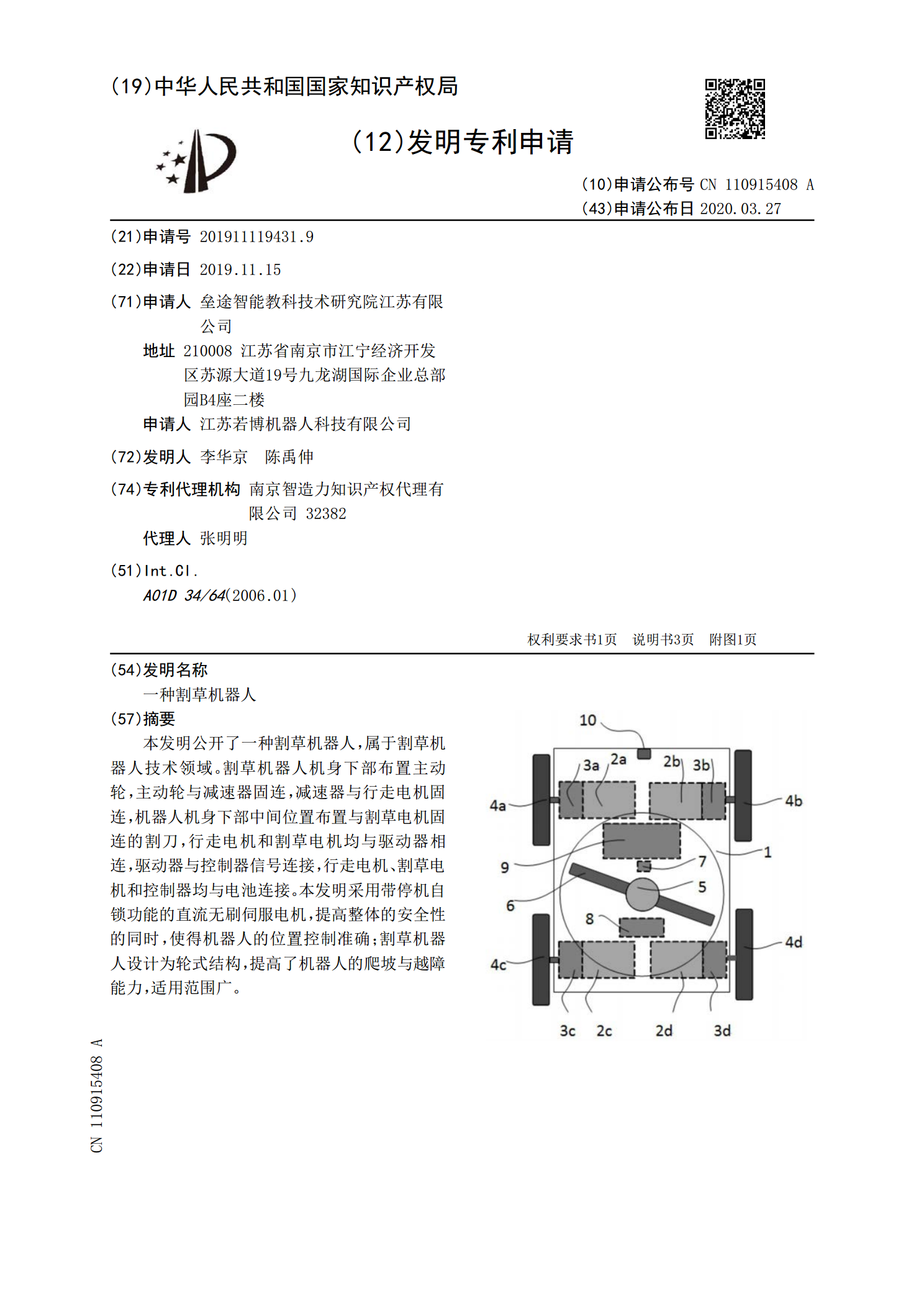
本发明公开了一种割草机器人,属于割草机器人技术领域。割草机器人机身下部布置主动轮,主动轮与减速器固连,减速器与行走电机固连,机器人机身下部中间位置布置与割草电机固连的割刀,行走电机和割草电机均与驱动器相连,驱动器与控制器信号连接,行走电机、割草电机和控制器均与电池连接。本发明采用带停机自锁功能的直流无刷伺服电机,提高整体的安全性的同时,使得机器人的位置控制准确;割草机器人设计为轮式结构,提高了机器人的爬坡与越障能力,适用范围广。
一种割草机器人.pdf
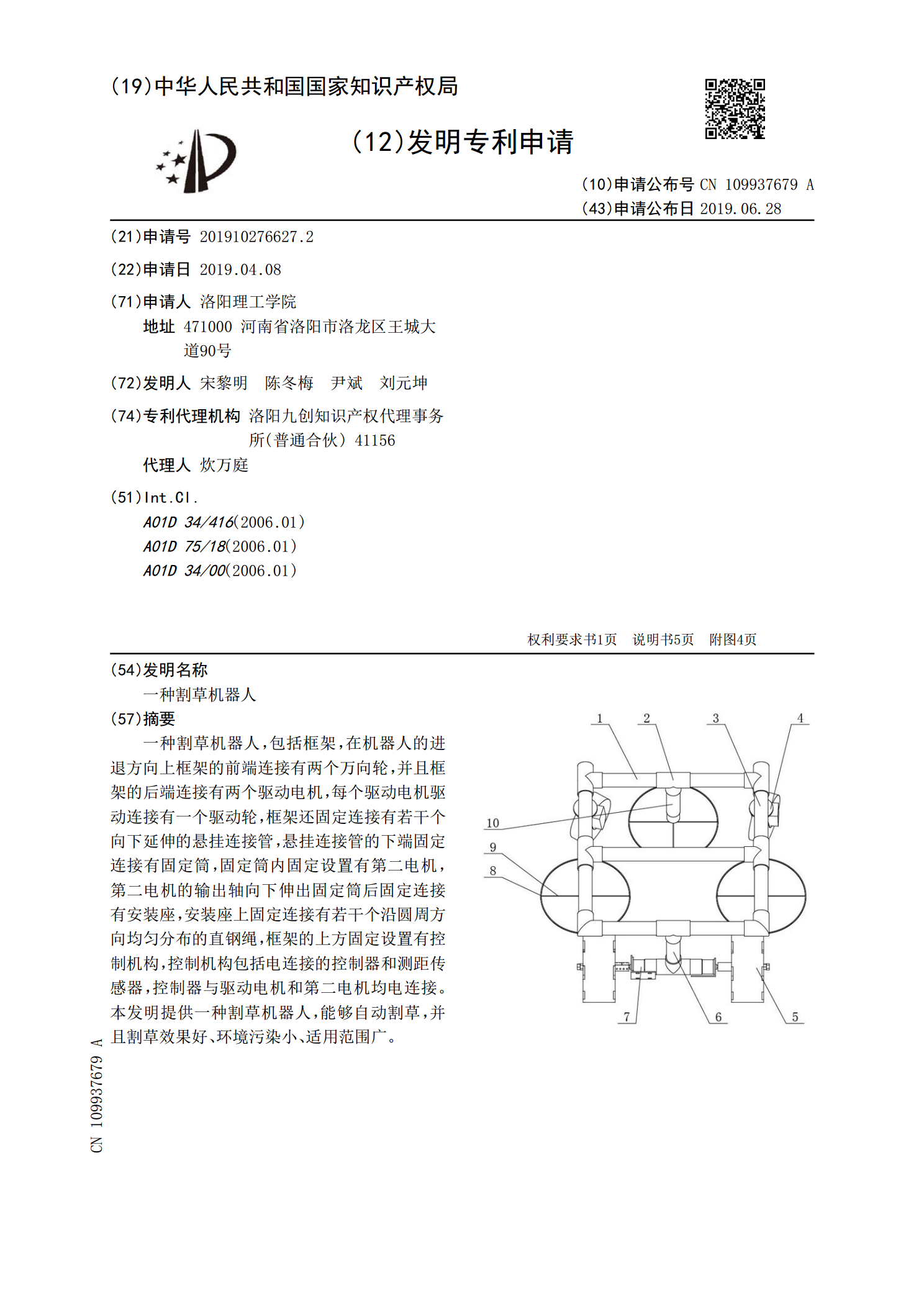
一种割草机器人,包括框架,在机器人的进退方向上框架的前端连接有两个万向轮,并且框架的后端连接有两个驱动电机,每个驱动电机驱动连接有一个驱动轮,框架还固定连接有若干个向下延伸的悬挂连接管,悬挂连接管的下端固定连接有固定筒,固定筒内固定设置有第二电机,第二电机的输出轴向下伸出固定筒后固定连接有安装座,安装座上固定连接有若干个沿圆周方向均匀分布的直钢绳,框架的上方固定设置有控制机构,控制机构包括电连接的控制器和测距传感器,控制器与驱动电机和第二电机均电连接。本发明提供一种割草机器人,能够自动割草,并且割草效果好
一种割草机器人.pdf
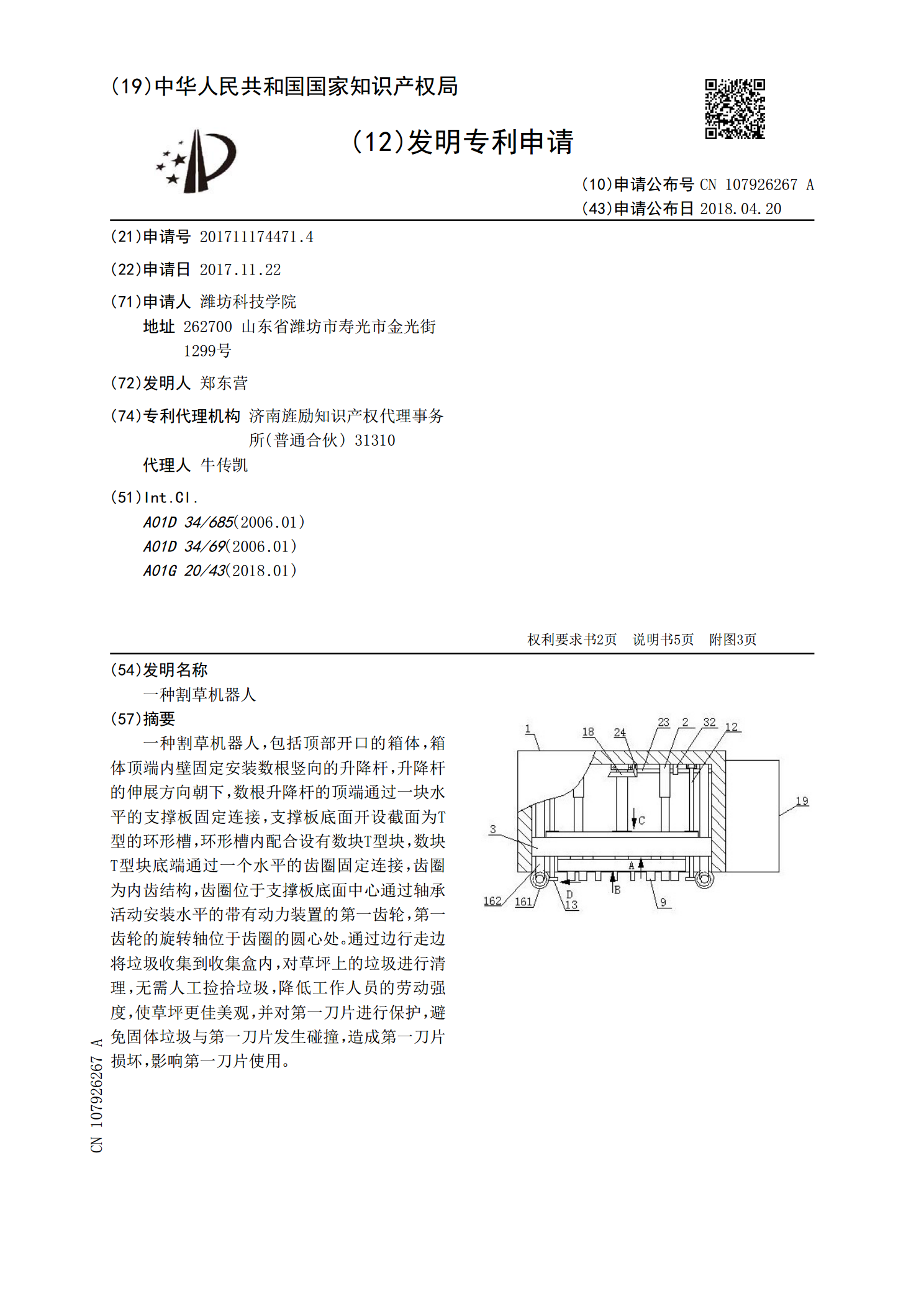
一种割草机器人,包括顶部开口的箱体,箱体顶端内壁固定安装数根竖向的升降杆,升降杆的伸展方向朝下,数根升降杆的顶端通过一块水平的支撑板固定连接,支撑板底面开设截面为T型的环形槽,环形槽内配合设有数块T型块,数块T型块底端通过一个水平的齿圈固定连接,齿圈为内齿结构,齿圈位于支撑板底面中心通过轴承活动安装水平的带有动力装置的第一齿轮,第一齿轮的旋转轴位于齿圈的圆心处。通过边行走边将垃圾收集到收集盒内,对草坪上的垃圾进行清理,无需人工捡拾垃圾,降低工作人员的劳动强度,使草坪更佳美观,并对第一刀片进行保护,避免固体