
关节驱动装置、具有驱动装置的关节机器人及驱动方法.pdf

一吃****春艳

1/9
2/9
3/9
4/9
5/9
6/9
7/9

8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
关节驱动装置、具有驱动装置的关节机器人及驱动方法.pdf
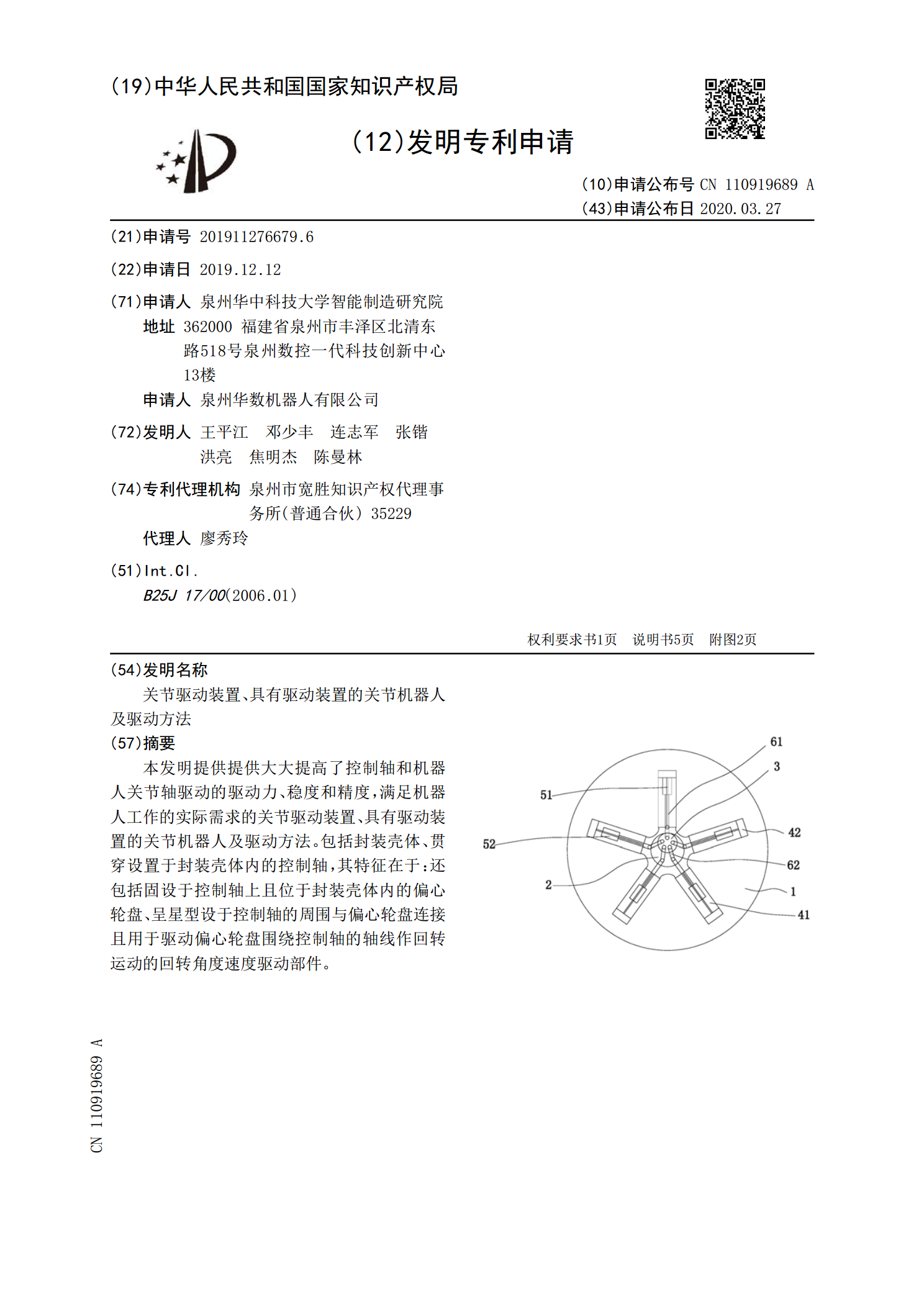
本发明提供提供大大提高了控制轴和机器人关节轴驱动的驱动力、稳度和精度,满足机器人工作的实际需求的关节驱动装置、具有驱动装置的关节机器人及驱动方法。包括封装壳体、贯穿设置于封装壳体内的控制轴,其特征在于:还包括固设于控制轴上且位于封装壳体内的偏心轮盘、呈星型设于控制轴的周围与偏心轮盘连接且用于驱动偏心轮盘围绕控制轴的轴线作回转运动的回转角度速度驱动部件。

关节装置的驱动方法.pdf
本发明提供一种适用于机器人关节且改善了可反向驱动性的关节装置的驱动方法。将第一马达和第二马达固定地设置在第一联杆。将第一马达的输出轴与差动减速器的内齿轮连结。将第二马达的输出轴与差动减速器的外齿轮连结。将第二联杆与差动减速器的内齿轮连结。在使第一联杆和第二联杆相对静止来确保固定的关节角的情况下,使第一马达和第二马达都以大于零的转速旋转并且使第一马达和第二马达的转速不同,从而使第二联杆静止。

机器人及其关节驱动装置.pdf
本发明公开了一种机器人及其关节驱动装置,机器人关节的驱动装置包括:关节驱动轮和联动齿轮;与所述关节驱动轮和联动齿轮均啮合的同步齿带,所述同步齿带的两端之间依次串接有第一弹性件和第二弹性件;调节部件,其能够调节所述第一弹性件和/或第二弹性件的长度。由于通过调节部件改变第一弹性件和/或第二弹性件的长度,进而改变了第一弹性件和第二弹性件共同形成的弹性组件的刚度,实现了机器人关机刚度的改变,使关节的驱动装置的刚度范围大大增加,能够适用于多种环境,大大提高了柔性关节的通用性。

多关节跳跃机器人弹性关节模块化驱动装置.pdf
本发明提供的是一种跳跃机器人弹性关节模块化驱动装置。包括关节轴支架、关节轴、关节轴固定销、关节扭簧、关节轴承、关节轴承座、电机安装架、电机、电磁离合器、电磁离合器安装架、蜗杆小支撑轴承、蜗轮轴、蜗轮支撑大轴承、蜗轮支撑大轴承端盖、蜗杆轴、蜗杆支撑大轴承、蜗轮蜗杆安装架、蜗轮支撑小轴承、同步齿形带、同步带轮、电磁离合器支架、涨紧轮安装架、涨紧轮、蜗杆支撑大轴承端盖、蜗杆固定销和蜗杆。本发明适用于跳跃机器人关节驱动,具有对电机功率要求低、电机性能发挥充分、跳跃性能高的特点。
一种工业机器人关节驱动装置.pdf
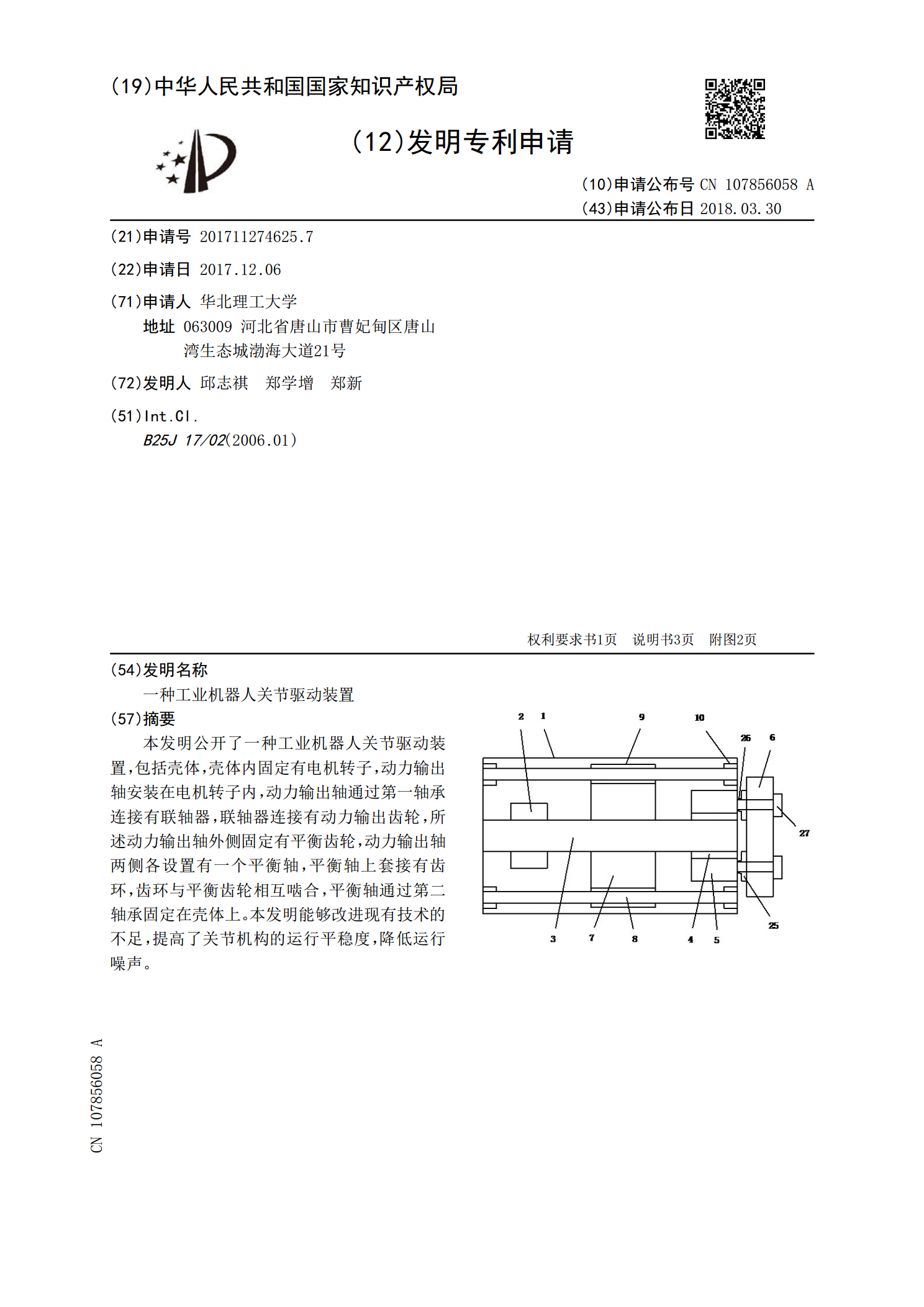
本发明公开了一种工业机器人关节驱动装置,包括壳体,壳体内固定有电机转子,动力输出轴安装在电机转子内,动力输出轴通过第一轴承连接有联轴器,联轴器连接有动力输出齿轮,所述动力输出轴外侧固定有平衡齿轮,动力输出轴两侧各设置有一个平衡轴,平衡轴上套接有齿环,齿环与平衡齿轮相互啮合,平衡轴通过第二轴承固定在壳体上。本发明能够改进现有技术的不足,提高了关节机构的运行平稳度,降低运行噪声。