
关节装置的驱动方法.pdf

一吃****春艳


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
关节驱动装置、具有驱动装置的关节机器人及驱动方法.pdf
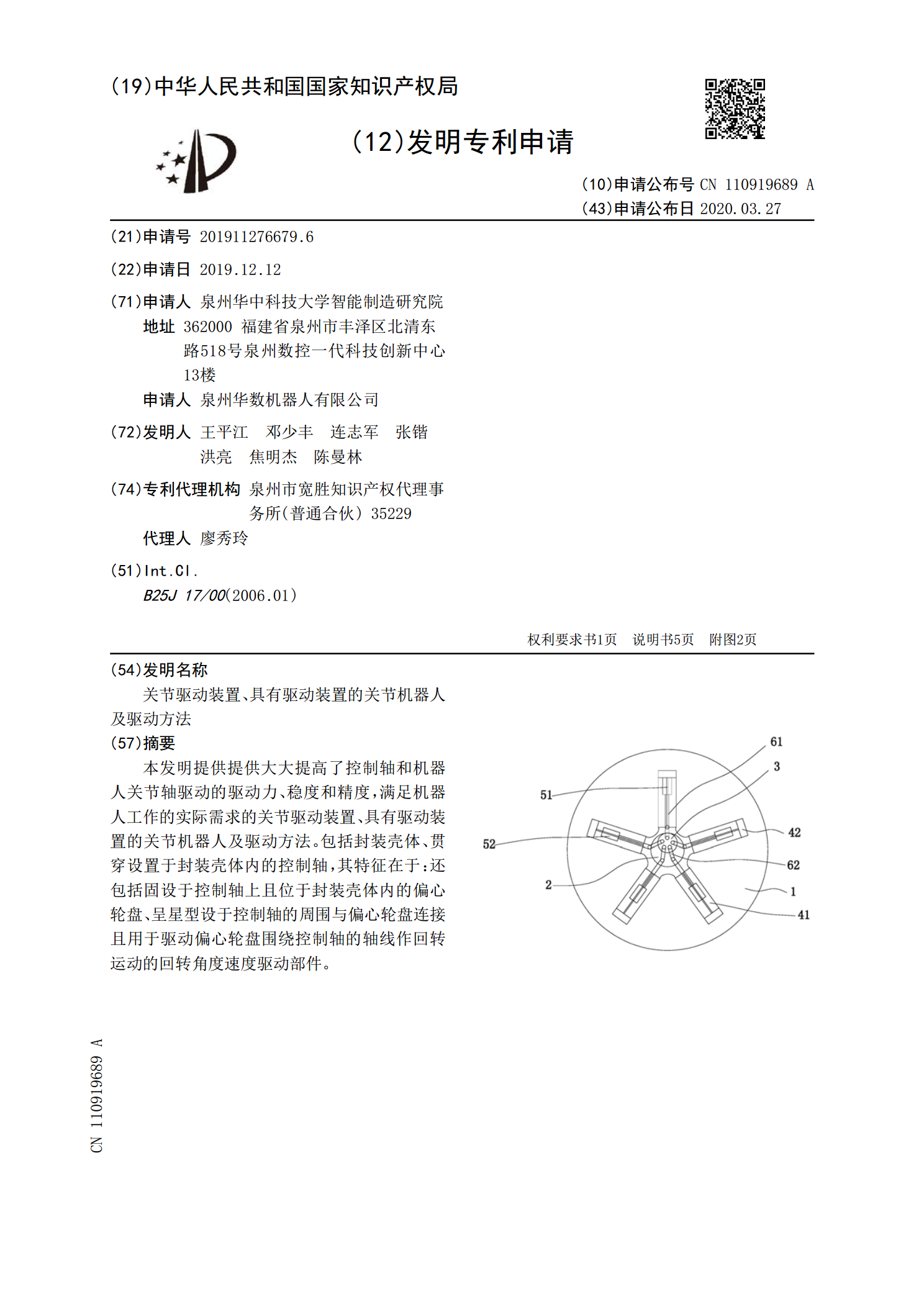
本发明提供提供大大提高了控制轴和机器人关节轴驱动的驱动力、稳度和精度,满足机器人工作的实际需求的关节驱动装置、具有驱动装置的关节机器人及驱动方法。包括封装壳体、贯穿设置于封装壳体内的控制轴,其特征在于:还包括固设于控制轴上且位于封装壳体内的偏心轮盘、呈星型设于控制轴的周围与偏心轮盘连接且用于驱动偏心轮盘围绕控制轴的轴线作回转运动的回转角度速度驱动部件。

关节装置的驱动方法.pdf
本发明提供一种适用于机器人关节且改善了可反向驱动性的关节装置的驱动方法。将第一马达和第二马达固定地设置在第一联杆。将第一马达的输出轴与差动减速器的内齿轮连结。将第二马达的输出轴与差动减速器的外齿轮连结。将第二联杆与差动减速器的内齿轮连结。在使第一联杆和第二联杆相对静止来确保固定的关节角的情况下,使第一马达和第二马达都以大于零的转速旋转并且使第一马达和第二马达的转速不同,从而使第二联杆静止。

机器人及其关节驱动装置.pdf
本发明公开了一种机器人及其关节驱动装置,机器人关节的驱动装置包括:关节驱动轮和联动齿轮;与所述关节驱动轮和联动齿轮均啮合的同步齿带,所述同步齿带的两端之间依次串接有第一弹性件和第二弹性件;调节部件,其能够调节所述第一弹性件和/或第二弹性件的长度。由于通过调节部件改变第一弹性件和/或第二弹性件的长度,进而改变了第一弹性件和第二弹性件共同形成的弹性组件的刚度,实现了机器人关机刚度的改变,使关节的驱动装置的刚度范围大大增加,能够适用于多种环境,大大提高了柔性关节的通用性。
基于人体膝关节和踝关节驱动的发电装置.pdf
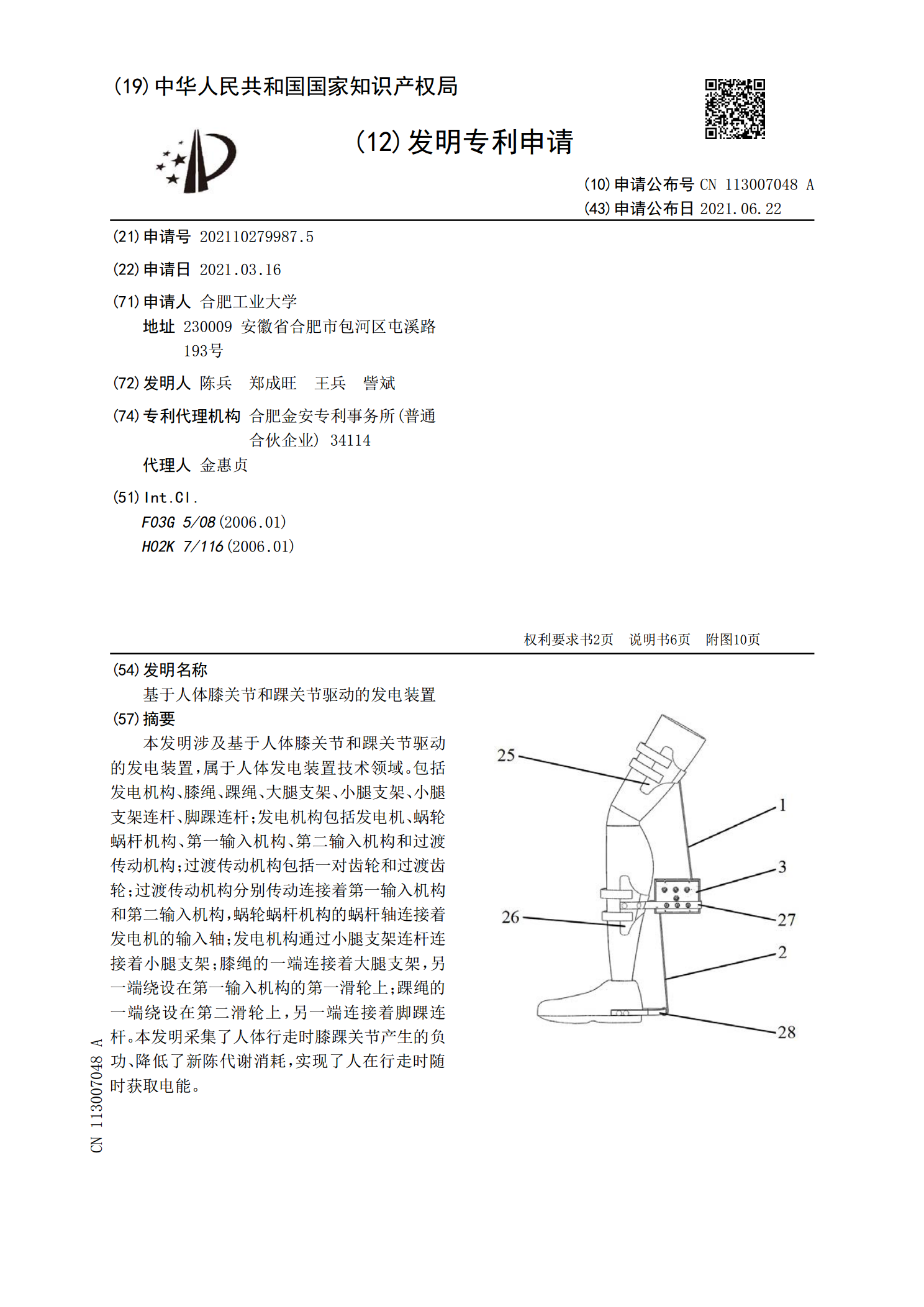
本发明涉及基于人体膝关节和踝关节驱动的发电装置,属于人体发电装置技术领域。包括发电机构、膝绳、踝绳、大腿支架、小腿支架、小腿支架连杆、脚踝连杆;发电机构包括发电机、蜗轮蜗杆机构、第一输入机构、第二输入机构和过渡传动机构;过渡传动机构包括一对齿轮和过渡齿轮;过渡传动机构分别传动连接着第一输入机构和第二输入机构,蜗轮蜗杆机构的蜗杆轴连接着发电机的输入轴;发电机构通过小腿支架连杆连接着小腿支架;膝绳的一端连接着大腿支架,另一端绕设在第一输入机构的第一滑轮上;踝绳的一端绕设在第二滑轮上,另一端连接着脚踝连杆。本发
一种用于关节驱动的主被动混合驱动装置.pdf
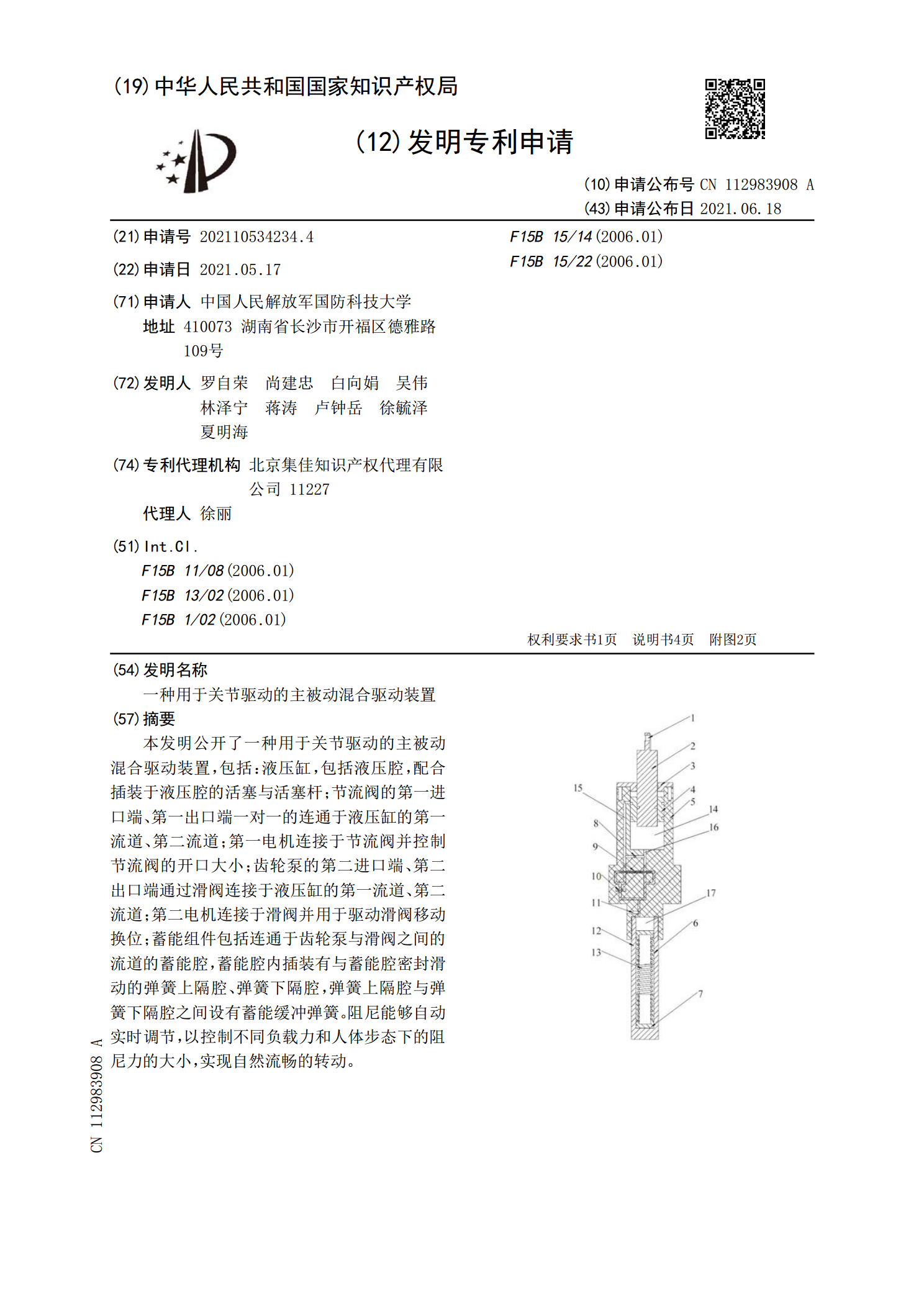
本发明公开了一种用于关节驱动的主被动混合驱动装置,包括:液压缸,包括液压腔,配合插装于液压腔的活塞与活塞杆;节流阀的第一进口端、第一出口端一对一的连通于液压缸的第一流道、第二流道;第一电机连接于节流阀并控制节流阀的开口大小;齿轮泵的第二进口端、第二出口端通过滑阀连接于液压缸的第一流道、第二流道;第二电机连接于滑阀并用于驱动滑阀移动换位;蓄能组件包括连通于齿轮泵与滑阀之间的流道的蓄能腔,蓄能腔内插装有与蓄能腔密封滑动的弹簧上隔腔、弹簧下隔腔,弹簧上隔腔与弹簧下隔腔之间设有蓄能缓冲弹簧。阻尼能够自动实时调节,