
一种轨道系统的检测和维护装置及方法.pdf

白凡****12

1/10
2/10
3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种轨道系统的检测和维护装置及方法.pdf
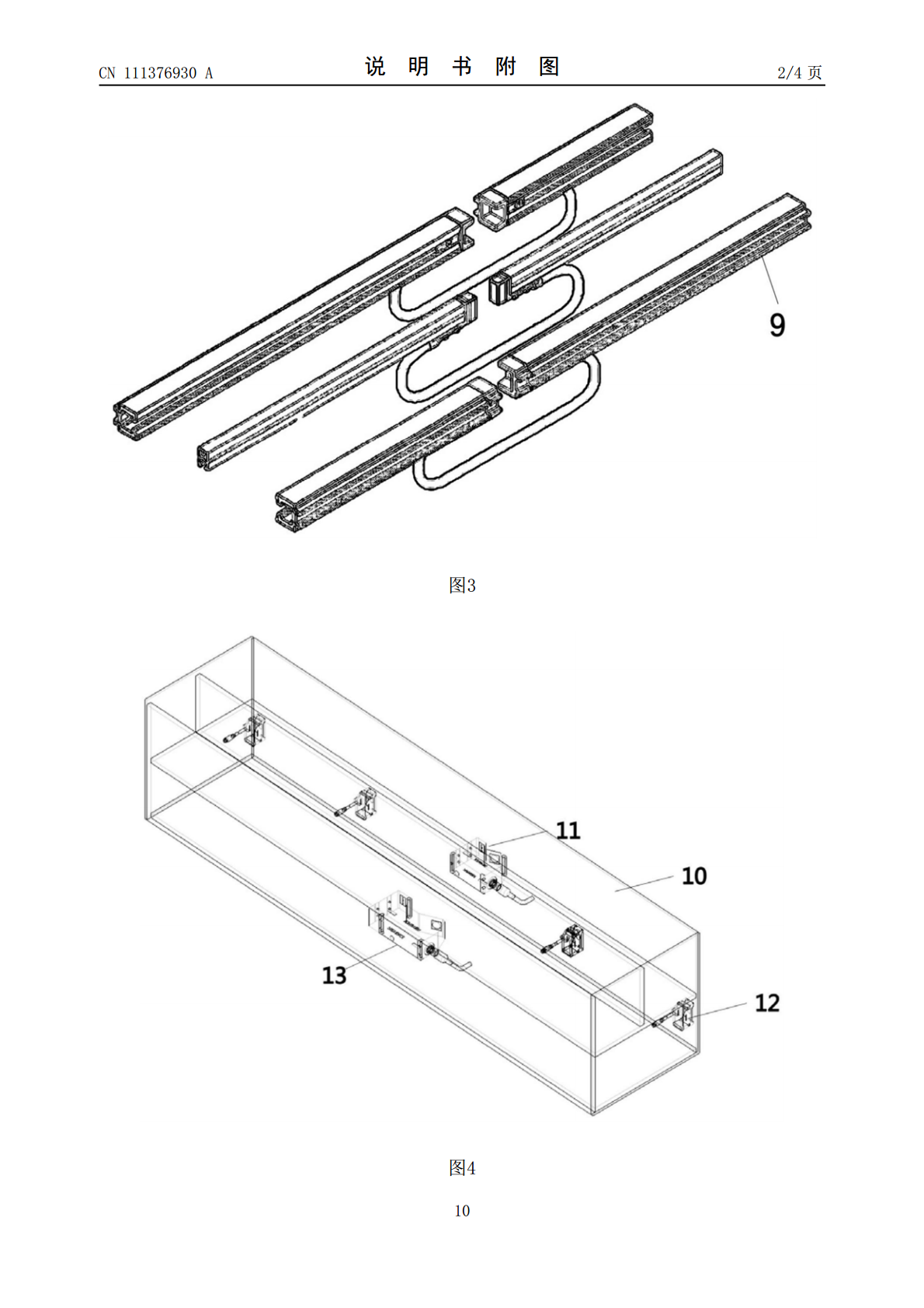
本发明公开了一种轨道系统的检测和维护装置,包括小车、导向轮和检测模块;小车设置于轨道系统的轨道上方;导向轮设置于小车中央位置的下方,且对称设置于轨道系统的轨道两侧,用于定位小车在轨道系统上的行进路线;检测模块设置于小车上,且与轨道系统的轨道贴合连接,实时进行轨道系统的里程定位和局部偏差检测。此发明解决了APM系统试运行过程中轨道系统中导向轨、行走面的日常检测、维护的问题,为导向轨和供电轨的局部偏差、轨面状况进行了检测,同时维护了作业人员、零部件和小型工具的运输,为APM轨道系统的检测和维护提供了有效的技术
一种轨道检测方法和装置.pdf
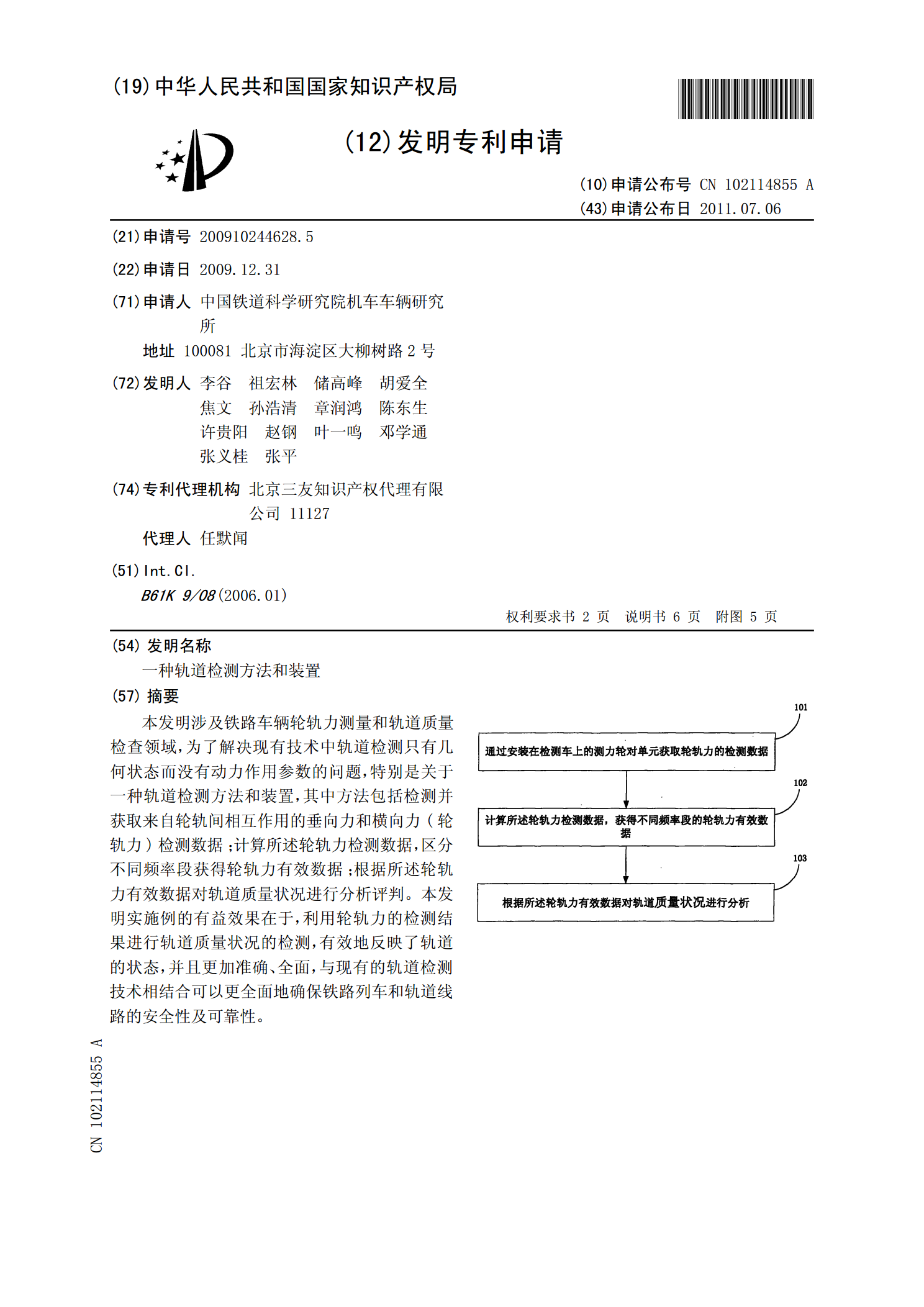
本发明涉及铁路车辆轮轨力测量和轨道质量检查领域,为了解决现有技术中轨道检测只有几何状态而没有动力作用参数的问题,特别是关于一种轨道检测方法和装置,其中方法包括检测并获取来自轮轨间相互作用的垂向力和横向力(轮轨力)检测数据;计算所述轮轨力检测数据,区分不同频率段获得轮轨力有效数据;根据所述轮轨力有效数据对轨道质量状况进行分析评判。本发明实施例的有益效果在于,利用轮轨力的检测结果进行轨道质量状况的检测,有效地反映了轨道的状态,并且更加准确、全面,与现有的轨道检测技术相结合可以更全面地确保铁路列车和轨道线路的安
轨道占用状态的检测方法、装置和轨道交通系统.pdf
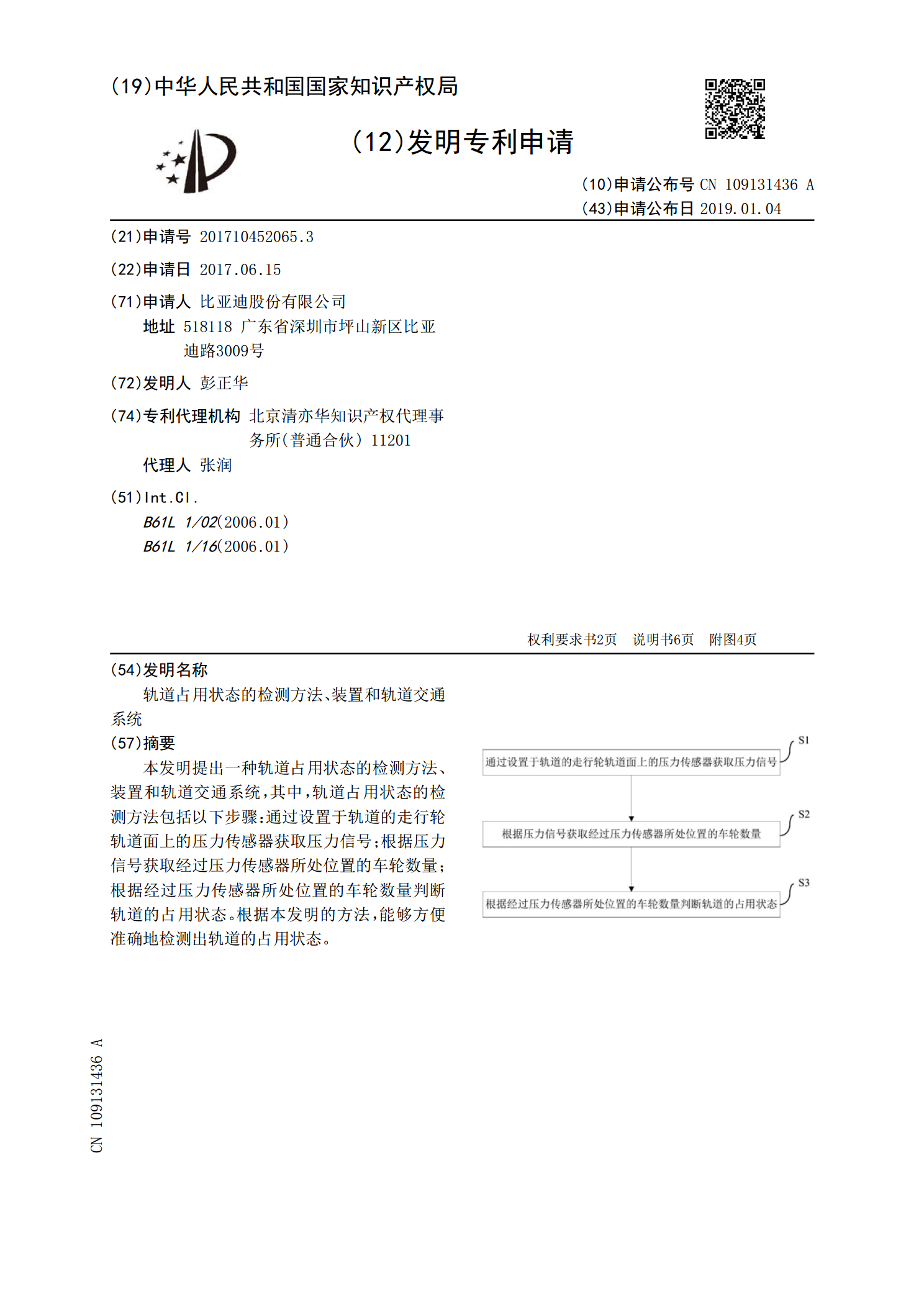
本发明提出一种轨道占用状态的检测方法、装置和轨道交通系统,其中,轨道占用状态的检测方法包括以下步骤:通过设置于轨道的走行轮轨道面上的压力传感器获取压力信号;根据压力信号获取经过压力传感器所处位置的车轮数量;根据经过压力传感器所处位置的车轮数量判断轨道的占用状态。根据本发明的方法,能够方便准确地检测出轨道的占用状态。
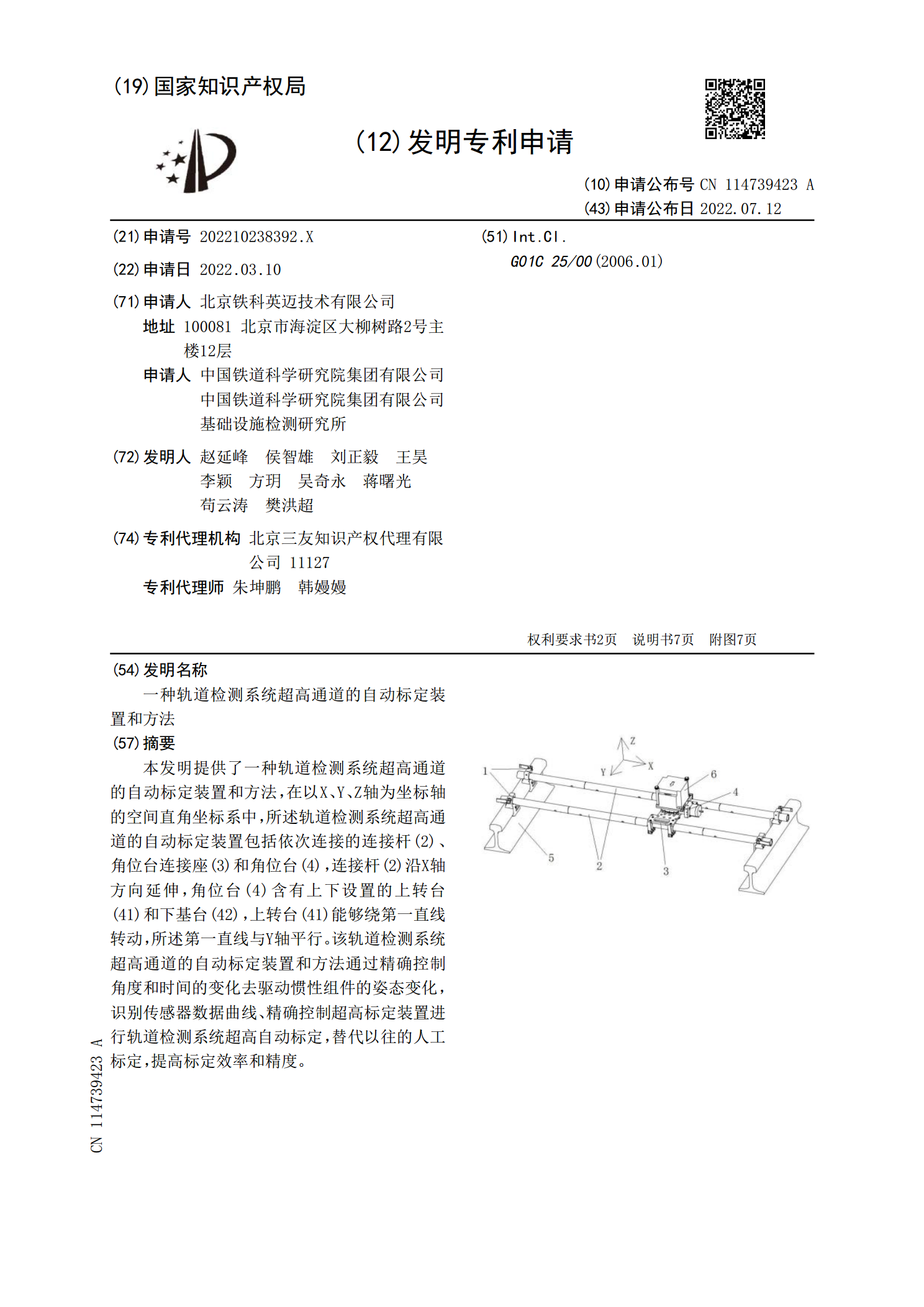
一种轨道检测系统超高通道的自动标定装置和方法.pdf
本发明提供了一种轨道检测系统超高通道的自动标定装置和方法,在以X、Y、Z轴为坐标轴的空间直角坐标系中,所述轨道检测系统超高通道的自动标定装置包括依次连接的连接杆(2)、角位台连接座(3)和角位台(4),连接杆(2)沿X轴方向延伸,角位台(4)含有上下设置的上转台(41)和下基台(42),上转台(41)能够绕第一直线转动,所述第一直线与Y轴平行。该轨道检测系统超高通道的自动标定装置和方法通过精确控制角度和时间的变化去驱动惯性组件的姿态变化,识别传感器数据曲线、精确控制超高标定装置进行轨道检测系统超高自动标定
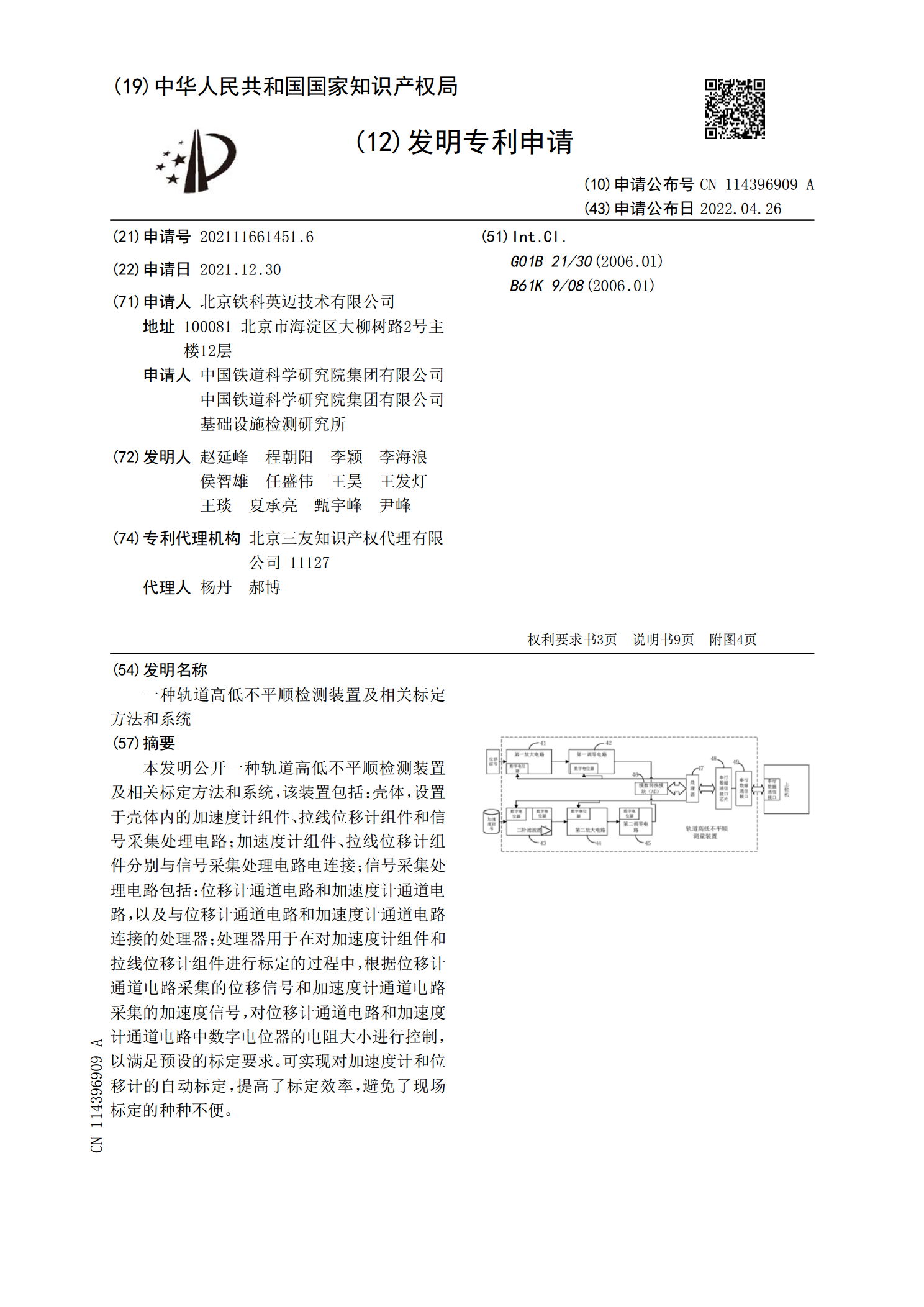
一种轨道高低不平顺检测装置及相关标定方法和系统.pdf
本发明公开一种轨道高低不平顺检测装置及相关标定方法和系统,该装置包括:壳体,设置于壳体内的加速度计组件、拉线位移计组件和信号采集处理电路;加速度计组件、拉线位移计组件分别与信号采集处理电路电连接;信号采集处理电路包括:位移计通道电路和加速度计通道电路,以及与位移计通道电路和加速度计通道电路连接的处理器;处理器用于在对加速度计组件和拉线位移计组件进行标定的过程中,根据位移计通道电路采集的位移信号和加速度计通道电路采集的加速度信号,对位移计通道电路和加速度计通道电路中数字电位器的电阻大小进行控制,以满足预设的