
一种基于超越离合机理的欠驱动攀爬机器人.pdf

春波****公主

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于超越离合机理的欠驱动攀爬机器人.pdf
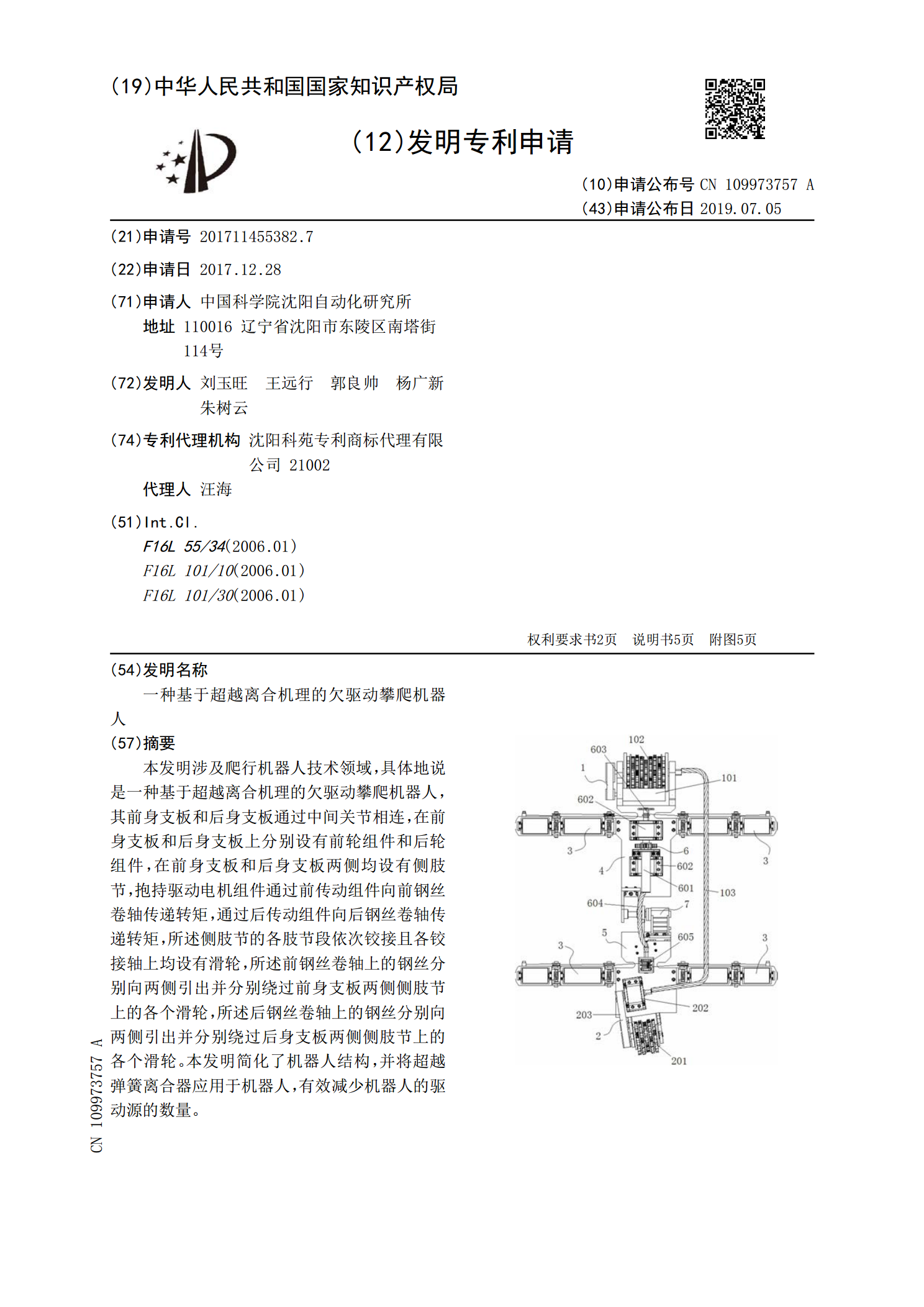
本发明涉及爬行机器人技术领域,具体地说是一种基于超越离合机理的欠驱动攀爬机器人,其前身支板和后身支板通过中间关节相连,在前身支板和后身支板上分别设有前轮组件和后轮组件,在前身支板和后身支板两侧均设有侧肢节,抱持驱动电机组件通过前传动组件向前钢丝卷轴传递转矩,通过后传动组件向后钢丝卷轴传递转矩,所述侧肢节的各肢节段依次铰接且各铰接轴上均设有滑轮,所述前钢丝卷轴上的钢丝分别向两侧引出并分别绕过前身支板两侧侧肢节上的各个滑轮,所述后钢丝卷轴上的钢丝分别向两侧引出并分别绕过后身支板两侧侧肢节上的各个滑轮。本发明简

一种单电机驱动的绳驱式欠驱动攀爬机器人.pdf
本发明涉及爬行机器人技术领域,具体地说是一种单电机驱动的绳驱式欠驱动攀爬机器人,其中前轮组件设于底盘前端,底盘后端设有辅助轮,侧肢节分设于底盘两侧,单电机驱动机构设于底盘上,且单电机驱动机构设有输出轴,所述输出轴前端通过前轮离合器与蜗杆相连,在前轮组件上设有蜗轮,且蜗杆与所述蜗轮啮合,输出轴后端通过抱持离合器与侧肢节驱动轴相连,侧肢节分别通过钢丝驱动,且所述钢丝缠绕于侧肢节驱动轴上,前轮离合器内设有前轮离合弹簧连接输出轴和蜗杆,抱持离合器内设有抱持离合弹簧连接输出轴和侧肢节驱动轴,所述前轮离合弹簧和抱持离

基于欠驱动机构的攀爬机器人稳定性研究.docx
基于欠驱动机构的攀爬机器人稳定性研究基于欠驱动机构的攀爬机器人稳定性研究摘要:攀爬机器人是一种可以在复杂环境中爬行的机器人,它可以用于各种应用,例如建筑物维护和灾难救援等。然而,由于复杂的工作环境和机器人本身的设计局限性,攀爬机器人的稳定性一直是一个关键问题。本文主要研究了基于欠驱动机构的攀爬机器人的稳定性,并提出了一种稳定性控制方法。1.引言攀爬机器人具有在垂直和倾斜表面上爬行的能力,可以在高空或复杂环境中完成任务。然而,攀爬机器人的稳定性受到机器人本身结构的限制,以及工作环境的不确定性等因素的影响。因
一种筋腱驱动自适应攀爬机器人.pdf
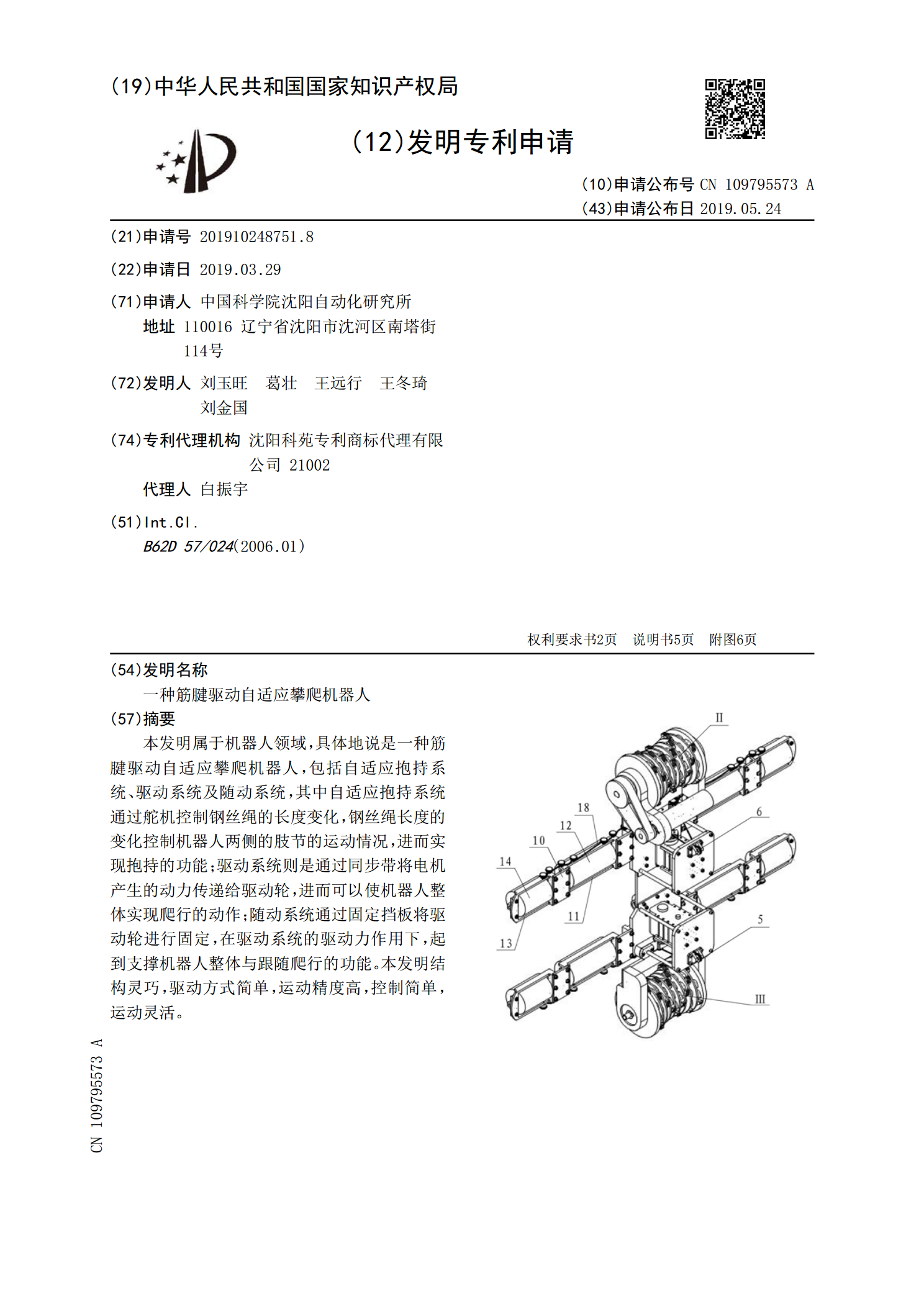
本发明属于机器人领域,具体地说是一种筋腱驱动自适应攀爬机器人,包括自适应抱持系统、驱动系统及随动系统,其中自适应抱持系统通过舵机控制钢丝绳的长度变化,钢丝绳长度的变化控制机器人两侧的肢节的运动情况,进而实现抱持的功能;驱动系统则是通过同步带将电机产生的动力传递给驱动轮,进而可以使机器人整体实现爬行的动作;随动系统通过固定挡板将驱动轮进行固定,在驱动系统的驱动力作用下,起到支撑机器人整体与跟随爬行的功能。本发明结构灵巧,驱动方式简单,运动精度高,控制简单,运动灵活。

面向欠驱动攀爬机器人的自适应算法研究及控制系统设计的开题报告.docx
面向欠驱动攀爬机器人的自适应算法研究及控制系统设计的开题报告一、研究背景随着机器人技术的发展和应用场景的不断拓展,攀爬机器人被广泛用于建筑物、桥梁等大型结构物的检测与维修等领域。然而,面对复杂多变的环境和不稳定的地形,攀爬机器人常常面临控制困难和运动不稳定的问题,尤其是在欠驱动情况下,更加需要研究自适应算法和控制策略。二、研究内容本文的研究内容主要包括以下几个方面:1.针对欠驱动攀爬机器人的特点,研究自适应算法,提高机器人的控制精度和运动稳定性。2.基于机器人的动力学模型和控制算法,设计攀爬机器人的控制系