
车辆的驱动系统.pdf

一吃****天材


1/10
2/10
3/10

4/10

5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
车辆驱动系统及车辆.pdf
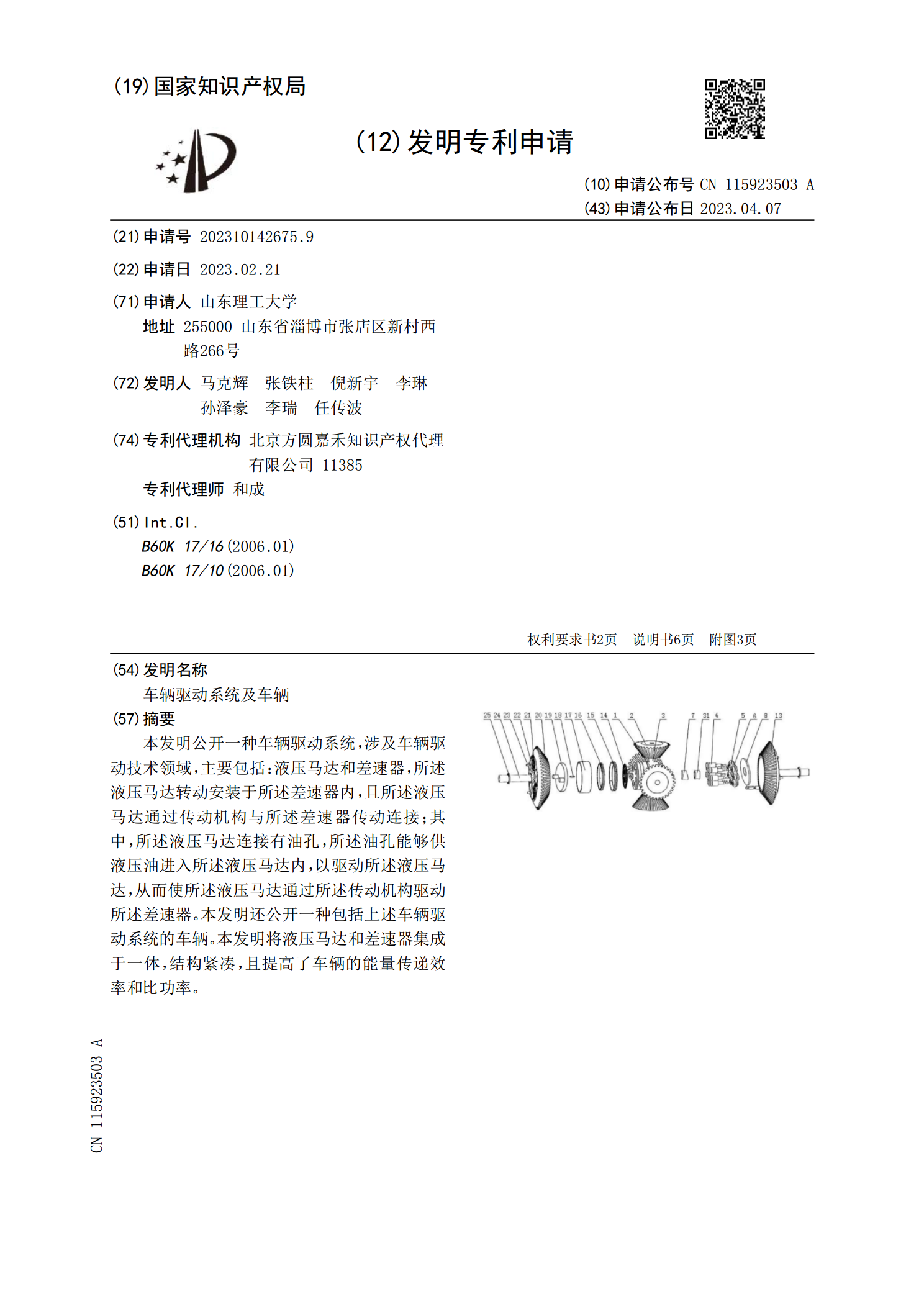
本发明公开一种车辆驱动系统,涉及车辆驱动技术领域,主要包括:液压马达和差速器,所述液压马达转动安装于所述差速器内,且所述液压马达通过传动机构与所述差速器传动连接;其中,所述液压马达连接有油孔,所述油孔能够供液压油进入所述液压马达内,以驱动所述液压马达,从而使所述液压马达通过所述传动机构驱动所述差速器。本发明还公开一种包括上述车辆驱动系统的车辆。本发明将液压马达和差速器集成于一体,结构紧凑,且提高了车辆的能量传递效率和比功率。

车辆驱动系统.pdf
一种车辆驱动系统(1),包括:输入轴(21),向其输入第一驱动源(2)的驱动力;第一轴(25),其相对于输入轴(21)惰转并且可与输入轴(21)连接,该第一轴(25)设置有多个驱动齿轮(26、28、29);单驱动齿轮(30),其相对于输入轴(21)惰转并且可与输入轴(21)连接;第二轴(32),其平行于输入轴(21)布置并且设置有第一中间齿轮(33)和第二中间齿轮(34);输出轴(41),其平行于输入轴(21)布置并且向车轮(7、8)输出驱动力;以及多个从动齿轮(42、44、45),其相对于输出轴(41)

车辆的驱动系统.pdf
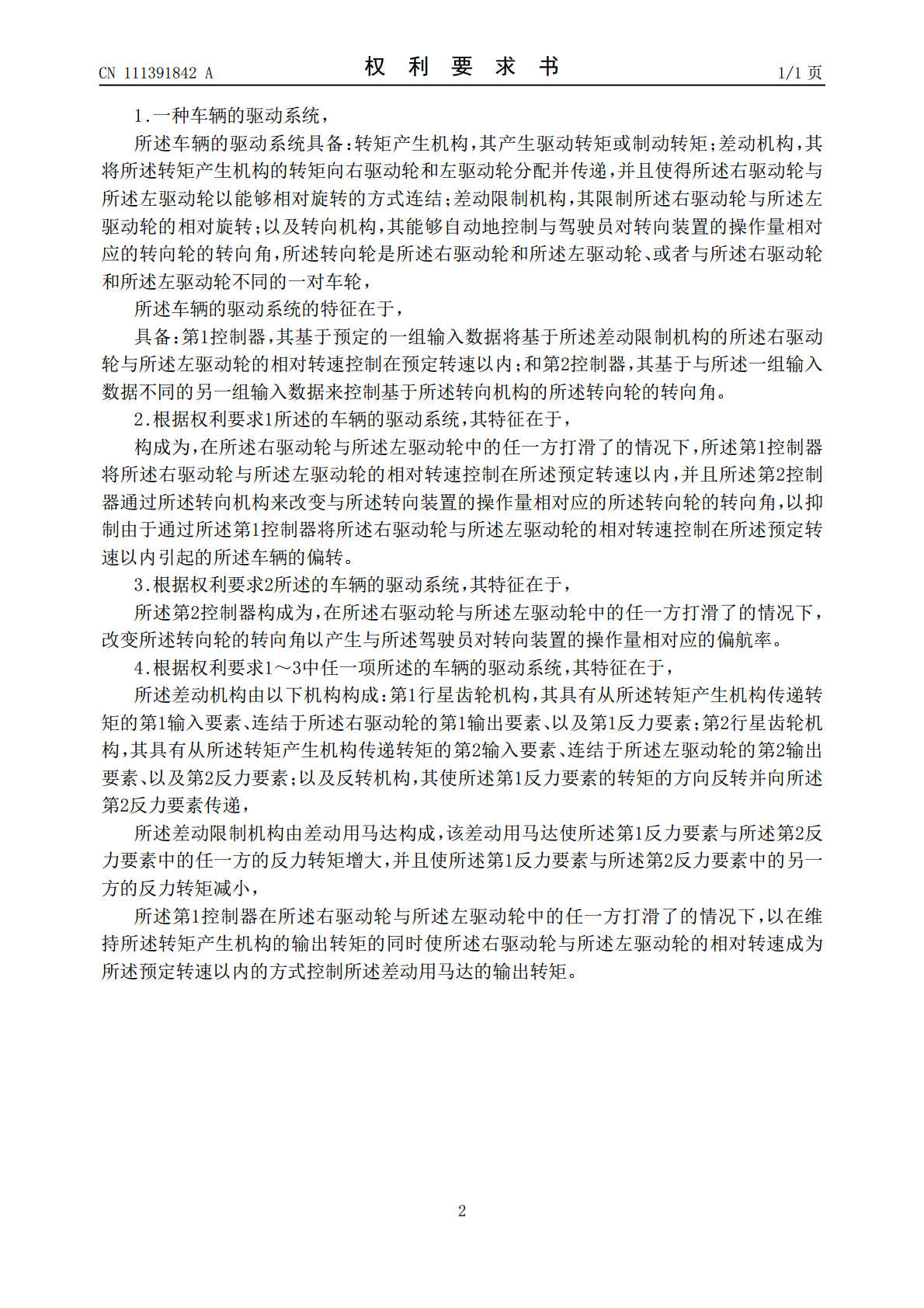
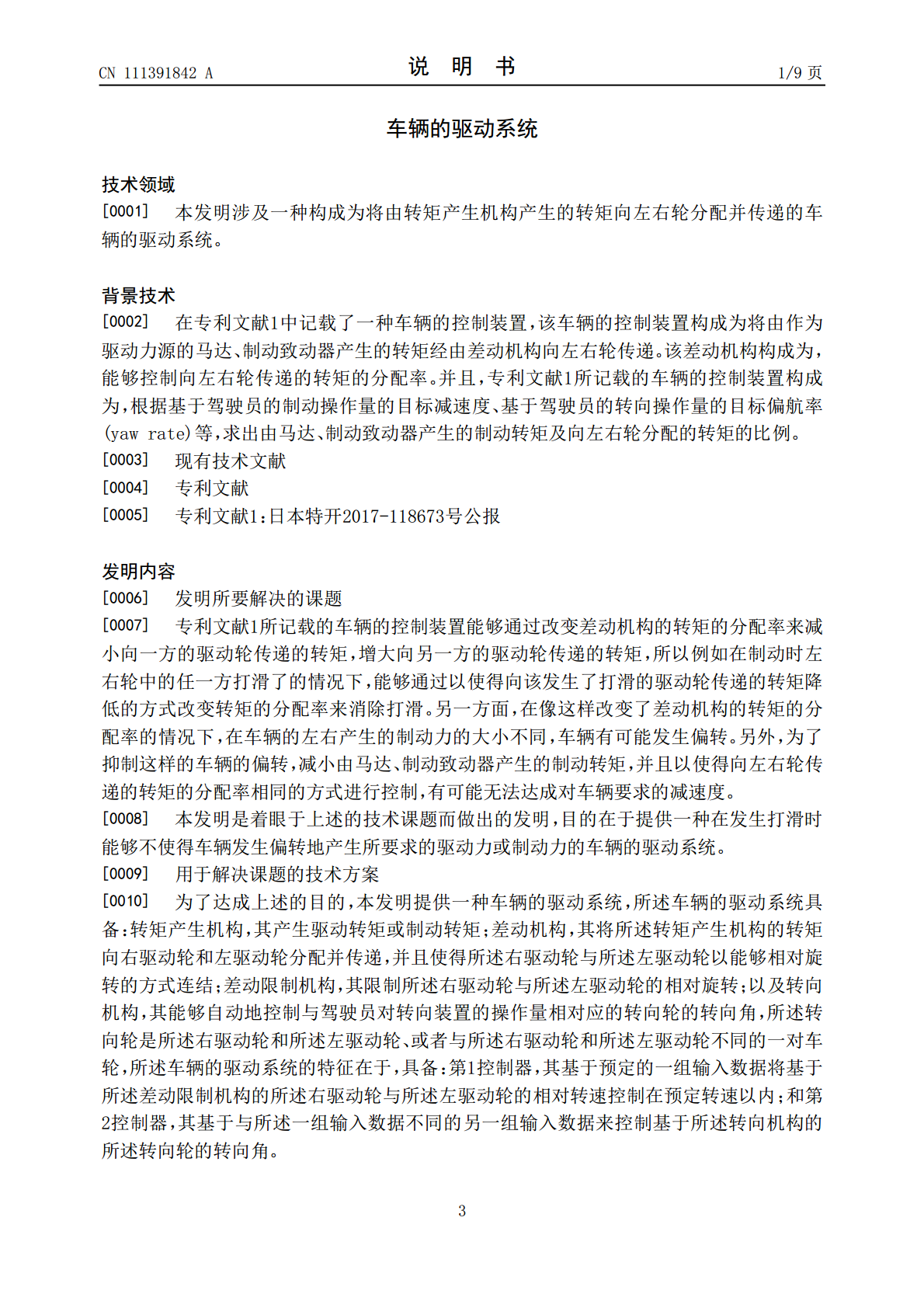
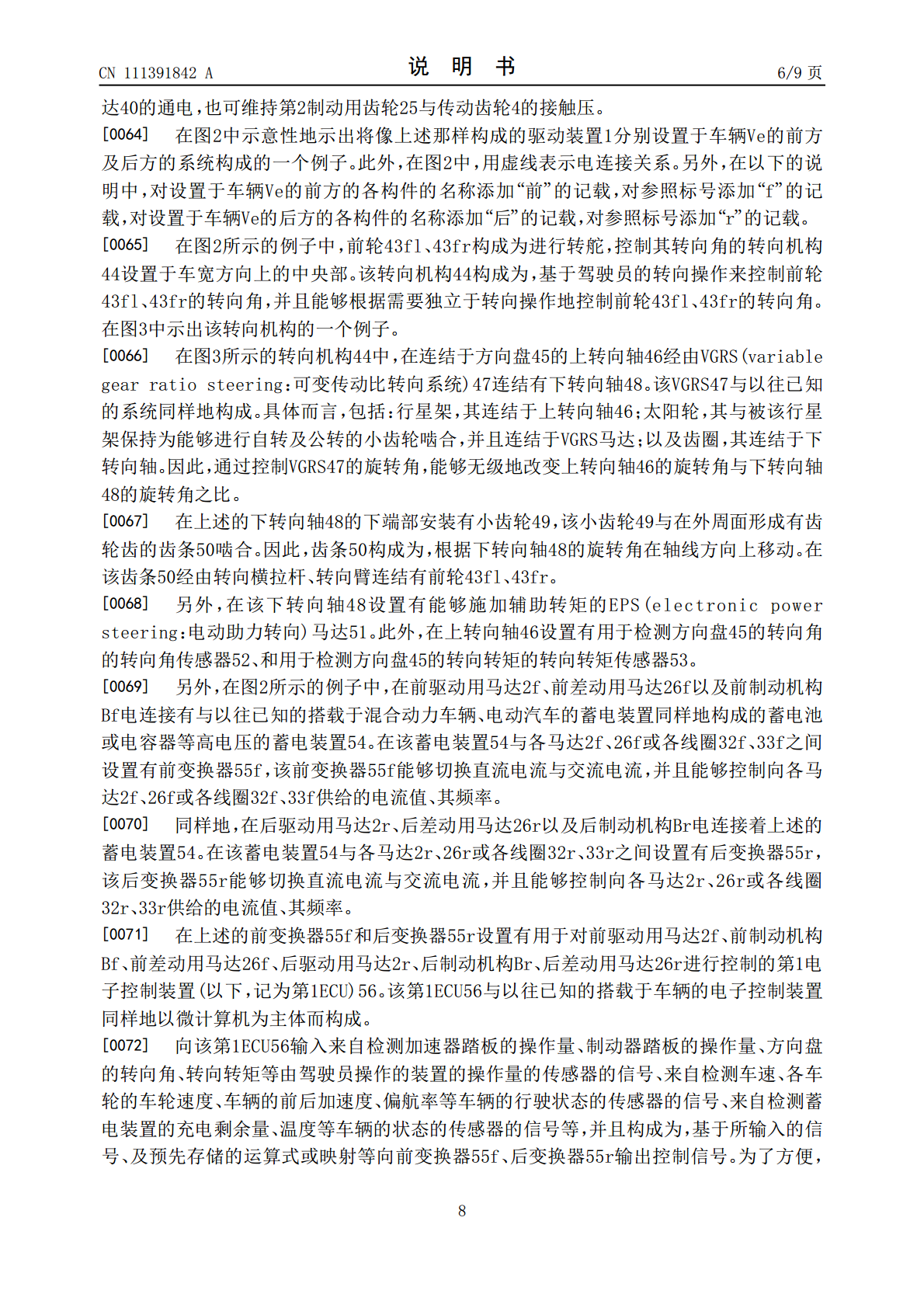
提供一种在发生打滑时车辆不会发生偏转,并且能够产生所要求的驱动力或制动力的车辆的驱动系统。所述车辆的驱动系统具备:转矩产生机构(Bf);差动机构(7f、8f),其从转矩产生机构(Bf)传递转矩并且使得左右轮(43fr、43fl)以能够相对旋转的方式连结;差动限制机构(26f),其限制该差动机构(7f、8f)的差动;转向机构(44),其能够自动地控制左右轮(43fr、43fl)的转向角;第1控制器(56),其基于预定的数据来控制基于差动限制机构(26f)的左右轮(43fr、43fl)的相对转速;以及第2控制

车辆驱动系统.pdf
一种车辆驱动系统公开了一种金属制造品,属于一种车用驱动系统。主要解决了摩托车机体和油箱不在是骑在身下的问题,实现了摩托车像轿车一样的驾驶方式,驱动桥不在使用链条和传动轴,提高了能源利用率,同时在桥体上加上电动机,实现了油电两用双动力车辆驱动系统,提高了电能在山区车辆上的使用,同时摩托车机传动与电动机传动中都能拥有高低速档位。本发明采用把摩托车燃油机直接置于驱动桥的桥壳上,通过具有联动功能的踏板进行远距离变档和由滑轮组成的启动机构完成远距离启动,同时在燃油机一侧加上电动机,通过切换器实现两机独立工作。本发明

车辆驱动系统.pdf
驱动系统(2A)包括传动机构(7),通过在变速齿轮系(41-44、46)中切换和将第一驱动轴(10A)联接到输出轴(5),所述传动机构(7)设立包括第一速度变速档位至第六速度变速档位和反向驱动变速档位的多个变速档位,并且还包括锁定离合器(SL),所述锁定离合器(SL)在锁定状态和释放状态之间切换动力分配机构(6),在所述锁定状态中,环形齿轮(Rg)和架(Cr)彼此联接并抑制以差动形式进行的旋转,在所述释放状态中,取消对差动旋转的抑制。