
工业机器人、机械臂、关节结构及其装配方法.pdf

小云****66


1/10

2/10
3/10
4/10
5/10

6/10

7/10
8/10
9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

工业机器人、机械臂、关节结构及其装配方法.pdf
本发明涉及谐波减速器领域,提供一种工业机器人、机械臂、关节结构及其装配方法。关节结构包括第一主体、第二主体、电机和谐波减速器,谐波减速器具有柔轮、刚轮和波发生器,第二主体包括互相固定连接的第一件和第二件,第一件具有第一孔,谐波减速器位于第一孔中,谐波减速器位于第一主体与第二件之间;刚轮与第一件固定连接,刚轮的外周壁与第一孔的内周壁配合,柔轮与第一主体固定连接;第二件具有第一凸台和第二孔,第一凸台的外周壁与第一孔的内周壁配合,电机的机体固定在第二件的背向第一件的一侧,电机的转轴穿过第二孔后与波发生器连接。关
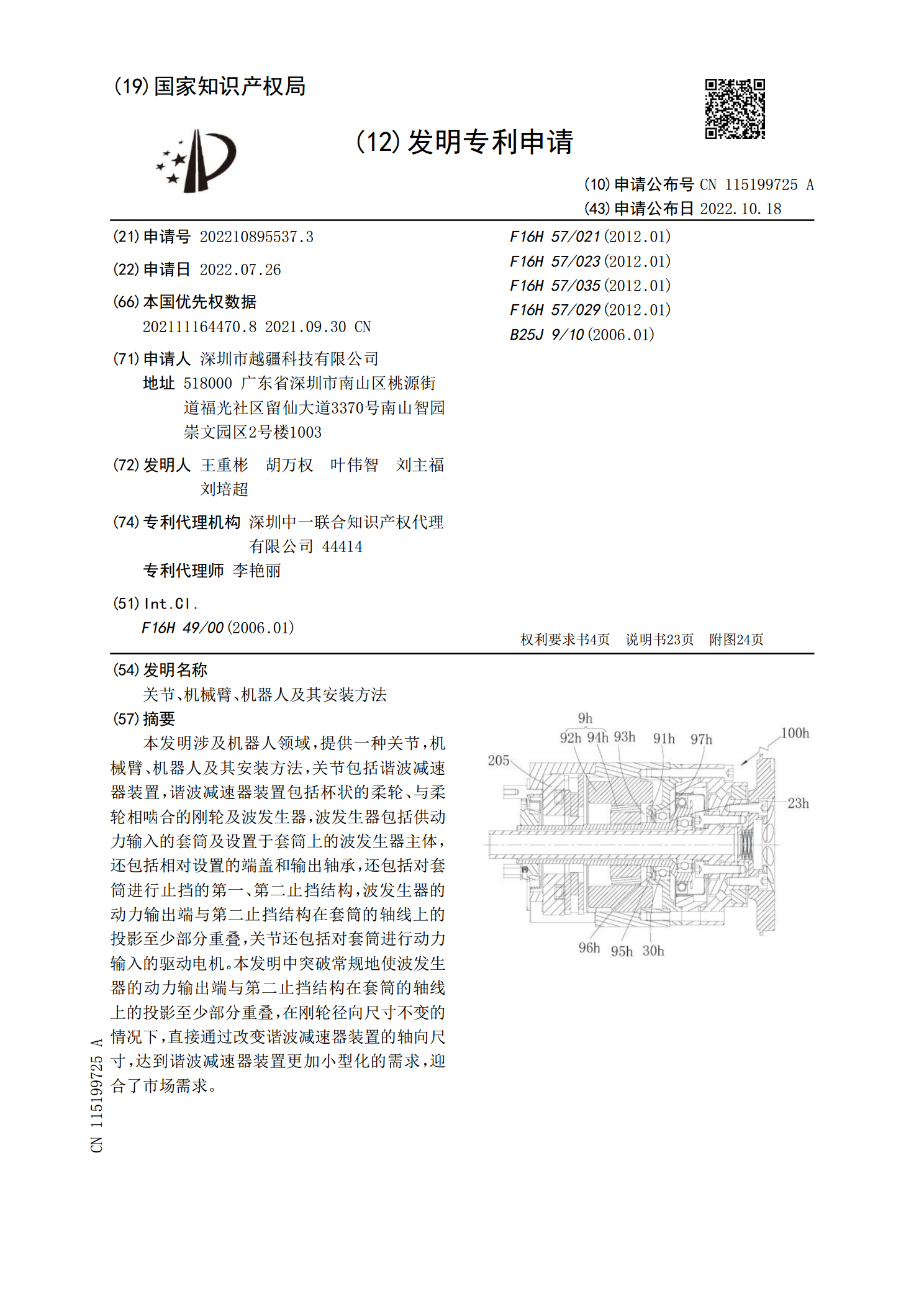
关节、机械臂、机器人及其安装方法.pdf
本发明涉及机器人领域,提供一种关节,机械臂、机器人及其安装方法,关节包括谐波减速器装置,谐波减速器装置包括杯状的柔轮、与柔轮相啮合的刚轮及波发生器,波发生器包括供动力输入的套筒及设置于套筒上的波发生器主体,还包括相对设置的端盖和输出轴承,还包括对套筒进行止挡的第一、第二止挡结构,波发生器的动力输出端与第二止挡结构在套筒的轴线上的投影至少部分重叠,关节还包括对套筒进行动力输入的驱动电机。本发明中突破常规地使波发生器的动力输出端与第二止挡结构在套筒的轴线上的投影至少部分重叠,在刚轮径向尺寸不变的情况下,直接通

机器人关节结构及机器人关节结构的装配方法.pdf
本发明提供了一种机器人关节结构及机器人关节结构的装配方法,所述机器人关节结构包括摇臂和基座,其中,所述摇臂包括安装腔,所述机器人关节结构包括驱动电机、波发生器以及减速机刚柔轮构件,其中:所述波发生器安装到所述减速机刚柔轮构件;所述减速机刚柔轮构件以第一部分固定到所述摇臂、第二部分固定到所述基座的方式安装,且所述减速机刚柔轮构件位于所述安装腔的第一端开口;所述驱动电机由所述安装腔的第二端开口插入所述安装腔内并固定到所述摇臂,且所述驱动电机的输出轴直接与所述波发生器的内孔配合传动。本发明通过将驱动电机的输出轴
关节型机器人机械臂结构设计.pdf
本科毕业论文关节型机器人机械臂结构设计姓名学院机械工程学院专业机械设计制造及其自动化指导教师完成日期2012年5月全日制本科生毕业设计(论文)承诺书本人郑重承诺:所呈交的毕业设计(论文)关节型机器人机械臂结构设计是在导师的指导下,严格按照学校和学院的有关规定由本人独立完成。文中所引用的观点和参考资料均已标注并加以注释。论文研究过程中不存在抄袭他人研究成果和伪造相关数据等行为。如若出现任何侵犯他人知识产权等问题,本人愿意承担相关法律责任。承诺人(签名):日期:关节型机器人机械臂结构设计摘要随着现代科学技术的

关节型机器人机械臂结构设计.pdf
关节型机器人机械臂结构设计--本科毕业论文关节型机器人机械臂结构设计姓名学院机械工程学院专业机械设计制造及其自动化指导教师完成日期2012年5月关节型机器人机械臂结构设计--关节型机器人机械臂结构设计--全日制本科生毕业设计(论文)承诺书本人郑重承诺:所呈交的毕业设计(论文)关节型机器人机械臂结构设计是在导师的指导下,严格按照学校和学院的有关规定由本人独立完成。文中所引用的观点和参考资料均已标注并加以注释。论文研究过程中不存在抄袭他人研究成果和伪造相关数据等行为。如若出现任何侵犯他人知识产权等问题,本人愿