
自平衡装置及其系统和机器人以及防跌倒装置.pdf

努力****冰心


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

自平衡装置及其系统和机器人以及防跌倒装置.pdf
本发明涉及机器人平衡装置技术领域,尤其涉及一种自平衡装置及其系统和机器人以及防跌倒装置。该自平衡装置及其系统包括框架结构、飞轮结构和控制器;飞轮结构可转动的连接在框架结构内,控制器固定设置在框架结构上;框架结构设置有框架驱动设备;框架驱动设备驱动连接飞轮结构;框架结构设置有与控制器电连接的飞轮角位移传感器;飞轮结构的转动方向与飞轮结构的转子转动方向呈夹角设置;飞轮结构和框架驱动设备分别与控制器电连接。该自平衡装置应用于外骨骼机器人、多足机器人等机器人和防跌倒装置。该本发明的目的在于提供自平衡装置及其系统和

防跌倒装置以及跌倒防护装置.pdf
本发明涉及一种防跌倒装置以及跌倒防护装置。所述防跌倒装置包括超声波传感器、第一微处理器、蜂鸣器、第一电源以及压电传感器,所述第一微处理器设有第一信号接口、第二信号接口、第三信号接口以及第一电源输入接口,所述第一微处理器获取所述压电传感器采集的压电信号,并控制所述超声波传感器发射超声信号,而后基于接收到的反射超声波信号控制所述蜂鸣器告警。所述跌倒防护装置包括所述防跌倒装置以及一种气囊保护装置。本发明提出的防跌倒装置提高了探测告警的准确性;当使用者将不可避免地发生摔倒时,可通过所述气囊保护装置的气囊展开获得缓

防海浪自平衡装置.pdf
本发明公开了防海浪自平衡装置,包括底座,所述底座的顶部活动连接有固定架,所述固定架的顶部镶嵌有球形块,所述球形块的底部固定连接有支杆,所述支杆的底部贯穿至底座的内腔,所述支杆的底部固定连接有配重块。本发明因为底座是固定在船体上的,当船体受到风浪而摇摆时,底座和固定架随着船体以球形块为运动中心做角度倾斜运动,而此时配重块在地心引力的作用下始终保持垂直向下的状态,并且底座在倾斜时,滚珠的底部与底座内腔底部的弧面接触并滑动,提高了配重块的灵活性,进而使得放置板顶部的物品始终处于平行放置的状态,并且不会因移动碰撞
移动机器人及其履带式底盘和重心自平衡装置及方法.pdf
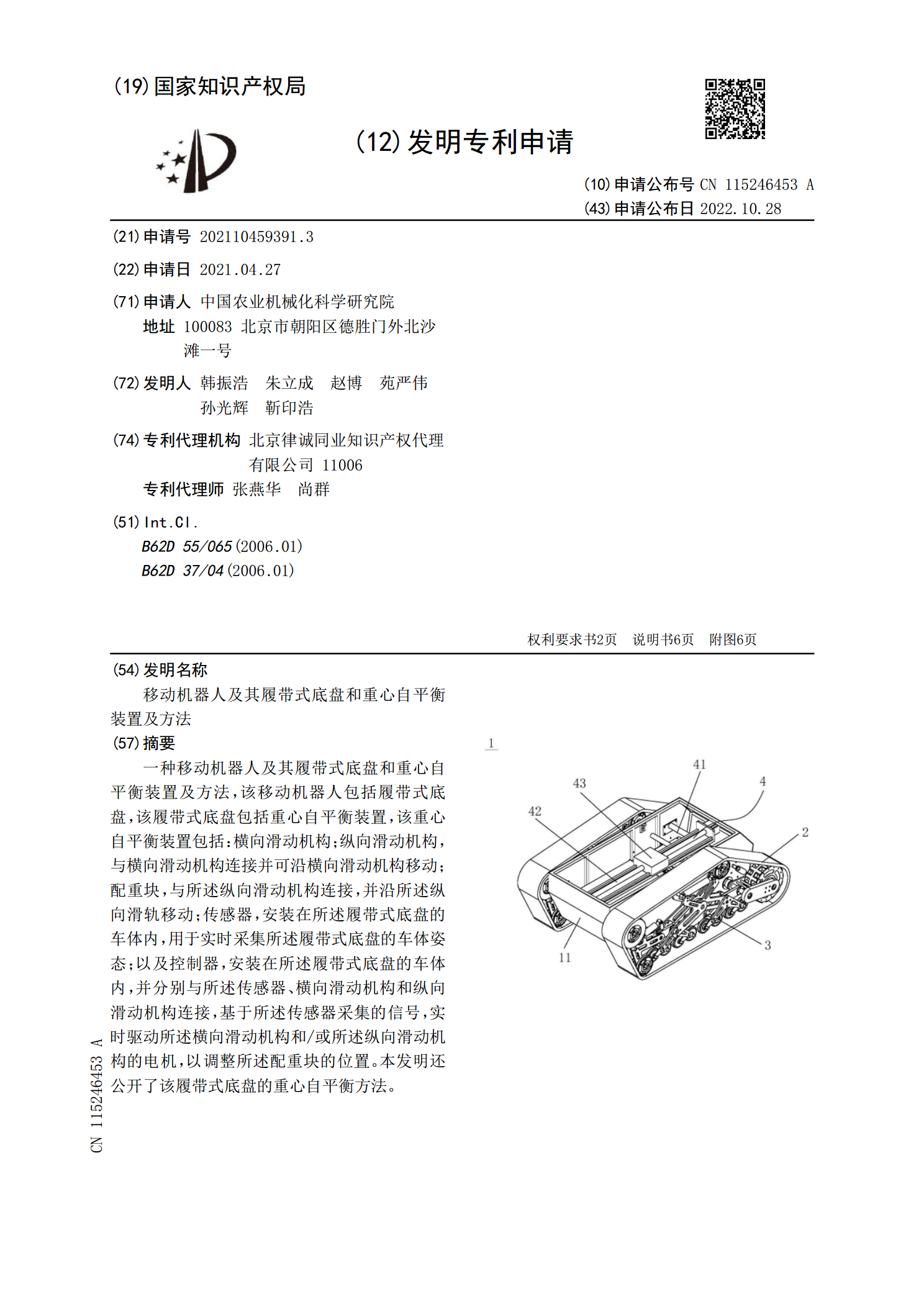
一种移动机器人及其履带式底盘和重心自平衡装置及方法,该移动机器人包括履带式底盘,该履带式底盘包括重心自平衡装置,该重心自平衡装置包括:横向滑动机构;纵向滑动机构,与横向滑动机构连接并可沿横向滑动机构移动;配重块,与所述纵向滑动机构连接,并沿所述纵向滑轨移动;传感器,安装在所述履带式底盘的车体内,用于实时采集所述履带式底盘的车体姿态;以及控制器,安装在所述履带式底盘的车体内,并分别与所述传感器、横向滑动机构和纵向滑动机构连接,基于所述传感器采集的信号,实时驱动所述横向滑动机构和/或所述纵向滑动机构的电机,以

齿轮、平衡装置以及带油泵的平衡装置.pdf
一种平衡装置,其中,所述平衡装置具备:具备平衡配重(6c)的平衡驱动轴(6)、与平衡驱动轴(6)一体旋转并经由曲轴齿轮(3)传递来自曲轴(2)的旋转力的主齿轮(5)、以及在平衡驱动轴(6)的旋转轴的方向上的主齿轮(5)的两侧面分别形成的第一环形槽(51)及第二环形槽(52),所述第一环形槽(51)及第二环形槽(52)在从旋转轴的方向观察时至少一部分重叠,并且在相对于旋转轴的径向上至少一部分重叠。根据该结构,能够抑制因齿轮彼此啮合而产生的声音,并抑制齿轮的大型化。