
移动机器人及其履带式底盘和重心自平衡装置及方法.pdf

fu****级甜


1/10

2/10
3/10
4/10

5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
移动机器人及其履带式底盘和重心自平衡装置及方法.pdf
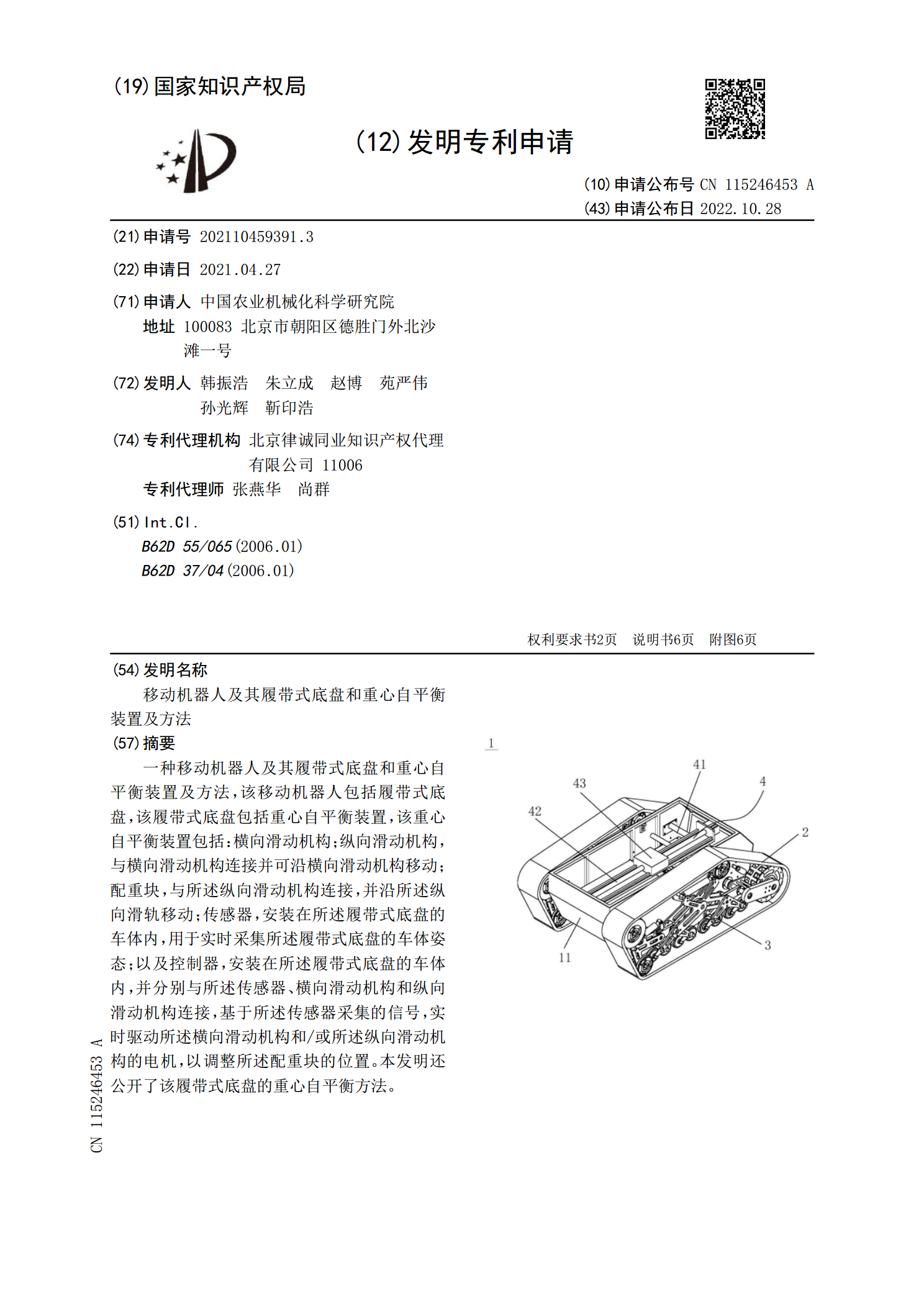
一种移动机器人及其履带式底盘和重心自平衡装置及方法,该移动机器人包括履带式底盘,该履带式底盘包括重心自平衡装置,该重心自平衡装置包括:横向滑动机构;纵向滑动机构,与横向滑动机构连接并可沿横向滑动机构移动;配重块,与所述纵向滑动机构连接,并沿所述纵向滑轨移动;传感器,安装在所述履带式底盘的车体内,用于实时采集所述履带式底盘的车体姿态;以及控制器,安装在所述履带式底盘的车体内,并分别与所述传感器、横向滑动机构和纵向滑动机构连接,基于所述传感器采集的信号,实时驱动所述横向滑动机构和/或所述纵向滑动机构的电机,以
履带式车辆可行走和任意转向底盘及其控制方法.pdf
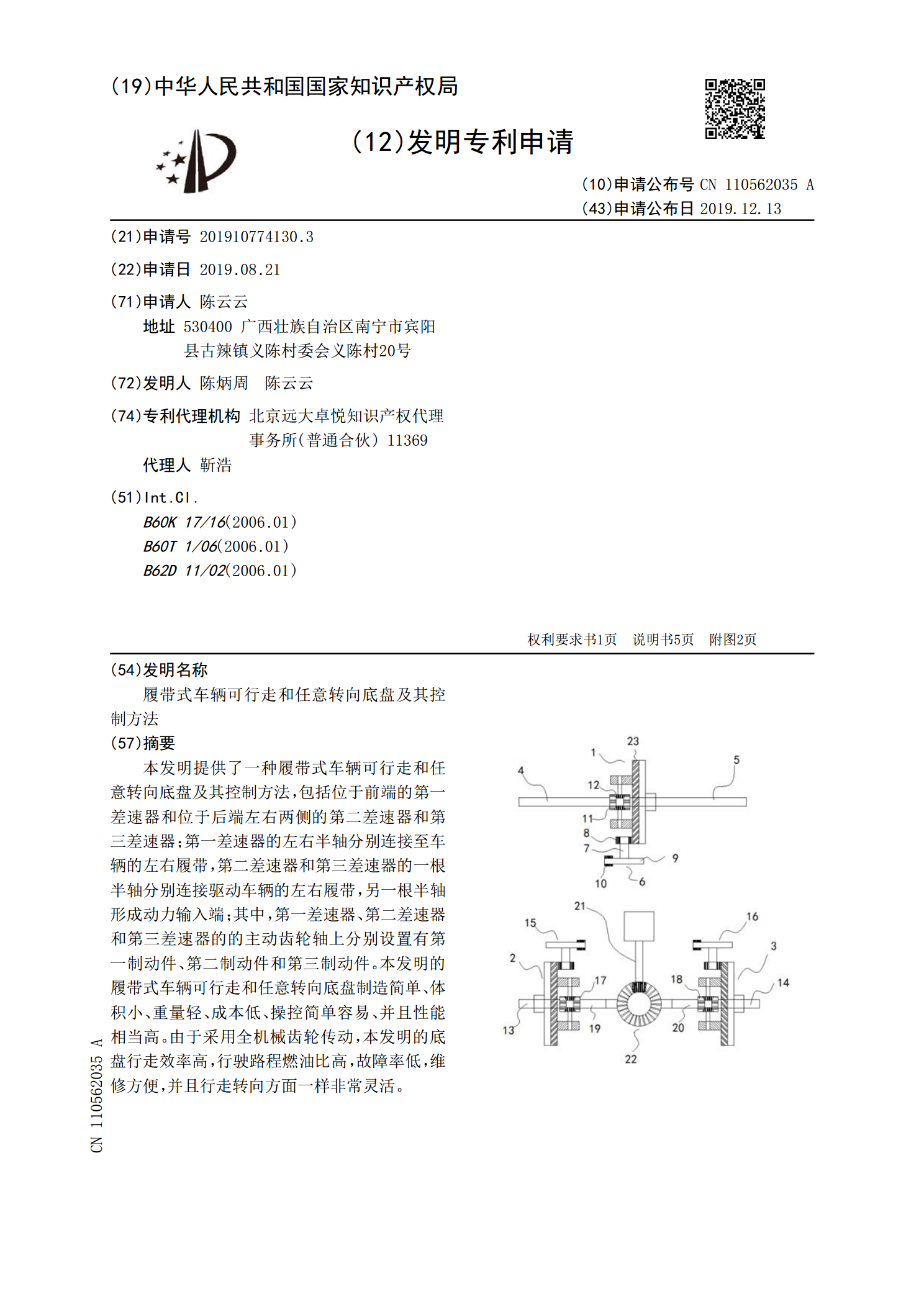
本发明提供了一种履带式车辆可行走和任意转向底盘及其控制方法,包括位于前端的第一差速器和位于后端左右两侧的第二差速器和第三差速器;第一差速器的左右半轴分别连接至车辆的左右履带,第二差速器和第三差速器的一根半轴分别连接驱动车辆的左右履带,另一根半轴形成动力输入端;其中,第一差速器、第二差速器和第三差速器的的主动齿轮轴上分别设置有第一制动件、第二制动件和第三制动件。本发明的履带式车辆可行走和任意转向底盘制造简单、体积小、重量轻、成本低、操控简单容易、并且性能相当高。由于采用全机械齿轮传动,本发明的底盘行走效率高
可自拆卸的伸缩履带式底盘.pdf
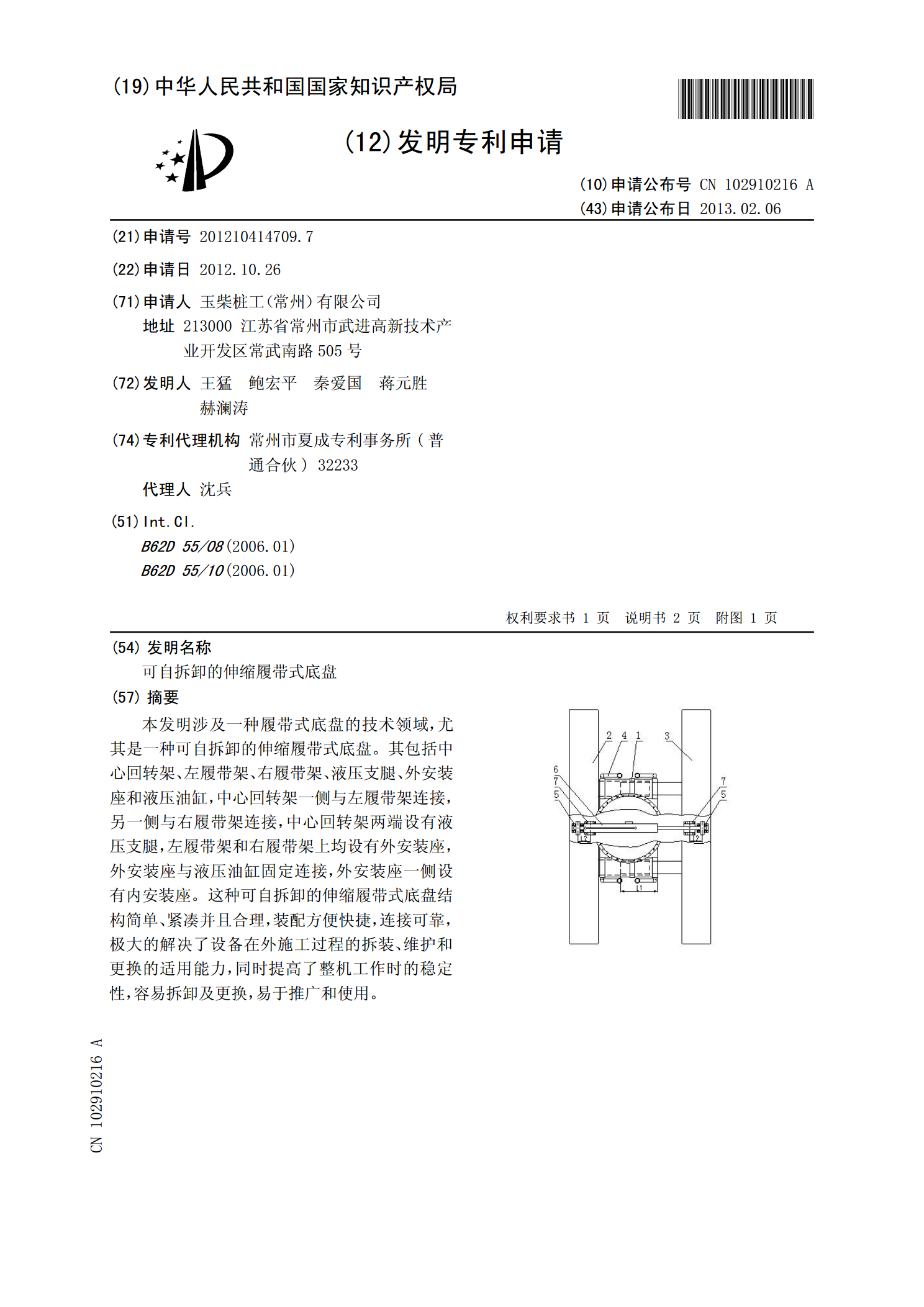
本发明涉及一种履带式底盘的技术领域,尤其是一种可自拆卸的伸缩履带式底盘。其包括中心回转架、左履带架、右履带架、液压支腿、外安装座和液压油缸,中心回转架一侧与左履带架连接,另一侧与右履带架连接,中心回转架两端设有液压支腿,左履带架和右履带架上均设有外安装座,外安装座与液压油缸固定连接,外安装座一侧设有内安装座。这种可自拆卸的伸缩履带式底盘结构简单、紧凑并且合理,装配方便快捷,连接可靠,极大的解决了设备在外施工过程的拆装、维护和更换的适用能力,同时提高了整机工作时的稳定性,容易拆卸及更换,易于推广和使用。

高稳定智能自平衡装置及其控制方法.pdf
本发明提供一种高稳定智能自平衡装置及其控制方法,包括外框、可转动设置于所述外框上的封闭外壳、可转动设置于所述外壳内的旋转体、驱动所述外壳的第二驱动装置、驱动旋转体的第一驱动装置、检测组件、处理装置和控制装置,所述外壳的转动轴与所述旋转体的转动轴相垂直,所述检测组件包括用于采集数据的角度传感器、转速传感器、陀螺仪传感器和加速度传感器,所述处理装置分别连接所述检测组件和控制装置,所述控制装置连接所述第一驱动装置和第二驱动装置。本发明的高稳定智能自平衡装置,可安装在各种需要维持平衡的设备,尤其是动态不稳定设备(

重心可调的两轮自平衡底盘装置.pdf
本发明公开了一种重心可调的两轮自平衡底盘装置,属于机器人技术领域,包括底盘、设置在底盘上的两个轮毂电机、安装在所述轮毂电机上的行走轮、安装在所述底盘下方的电池及配套的控制电路,其特征在于:在所述底盘上设有重心调整组件,所述重心调整组件包括重心调整块以及驱动重心调整块上下移动的直线驱动机构。本发明的装置在设备空闲时,控制重心调整块下降,使系统重心下降至轮毂电机输出轴水平面以下,不再需要轮毂电机频繁驱动形成的动态平衡,也不需要外部辅助支撑,起到了节能效果,也不影响底盘的外观设计,当设备运行时,控制重心调整块上