
步行辅助装置.pdf

Ja****44

1/10

2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共31页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
步行辅助装置及步行辅助装置的控制方法.pdf
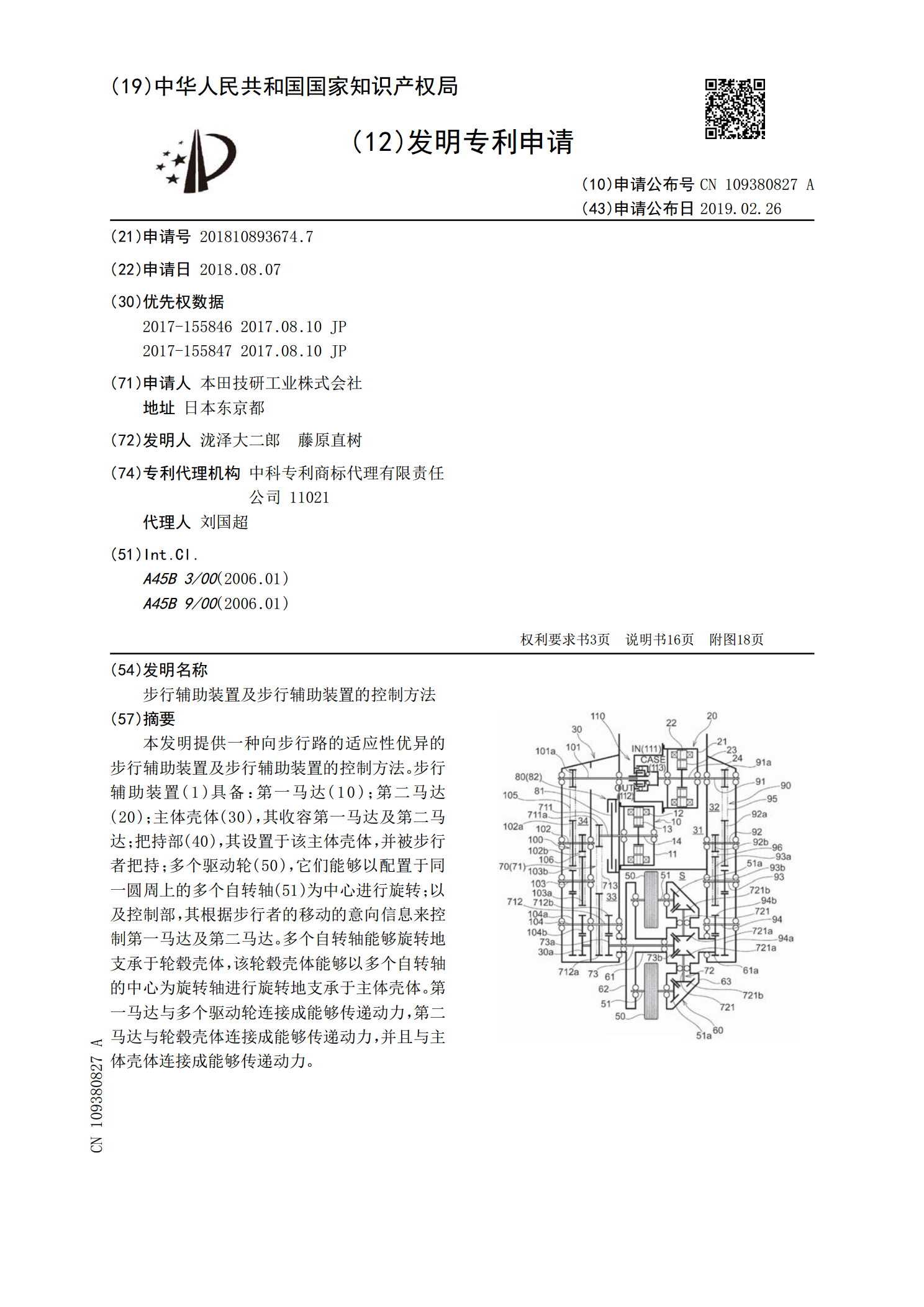
本发明提供一种向步行路的适应性优异的步行辅助装置及步行辅助装置的控制方法。步行辅助装置(1)具备:第一马达(10);第二马达(20);主体壳体(30),其收容第一马达及第二马达;把持部(40),其设置于该主体壳体,并被步行者把持;多个驱动轮(50),它们能够以配置于同一圆周上的多个自转轴(51)为中心进行旋转;以及控制部,其根据步行者的移动的意向信息来控制第一马达及第二马达。多个自转轴能够旋转地支承于轮毂壳体,该轮毂壳体能够以多个自转轴的中心为旋转轴进行旋转地支承于主体壳体。第一马达与多个驱动轮连接成能够
步行辅助装置.pdf
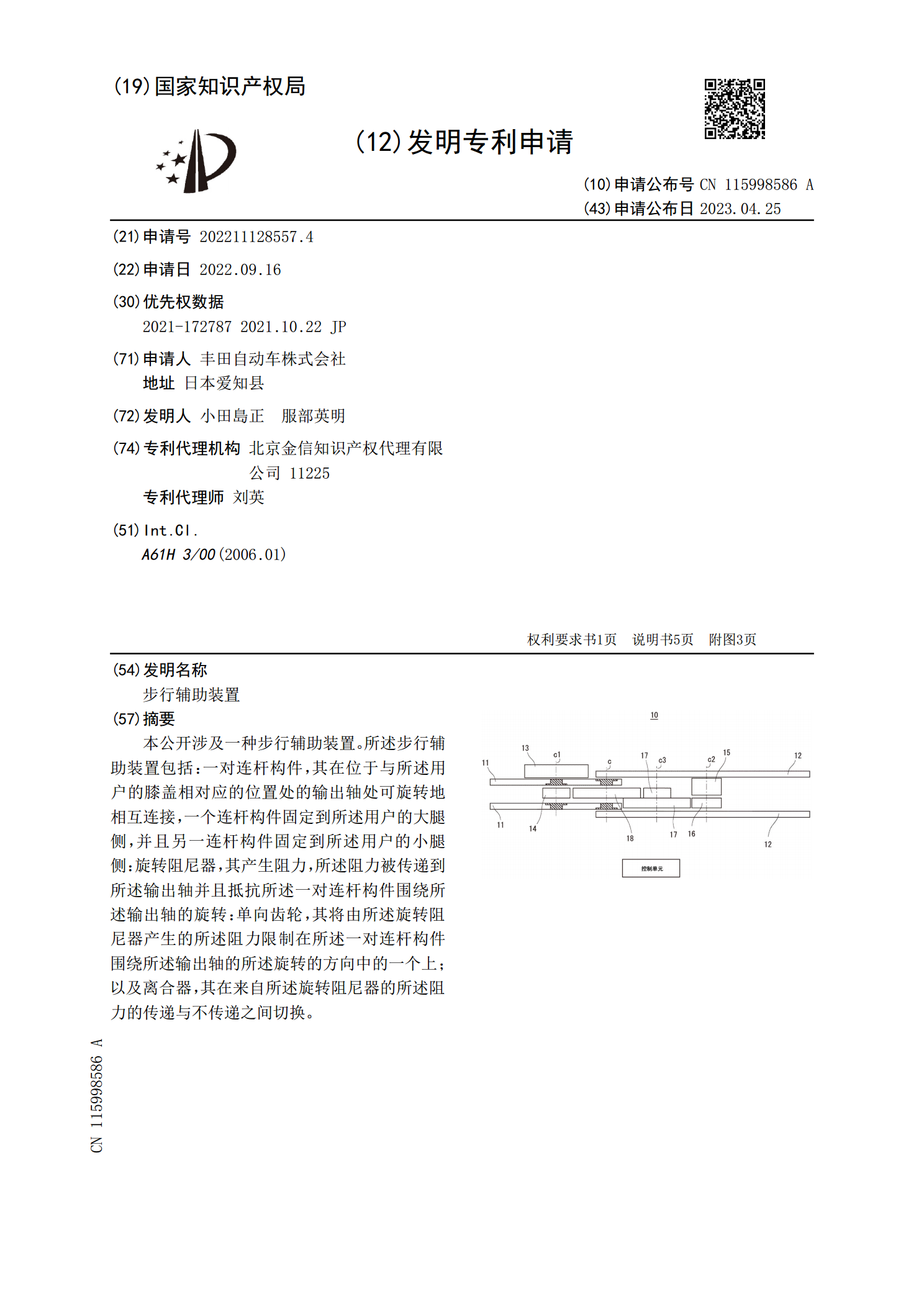
本公开涉及一种步行辅助装置。所述步行辅助装置包括:一对连杆构件,其在位于与所述用户的膝盖相对应的位置处的输出轴处可旋转地相互连接,一个连杆构件固定到所述用户的大腿侧,并且另一连杆构件固定到所述用户的小腿侧:旋转阻尼器,其产生阻力,所述阻力被传递到所述输出轴并且抵抗所述一对连杆构件围绕所述输出轴的旋转:单向齿轮,其将由所述旋转阻尼器产生的所述阻力限制在所述一对连杆构件围绕所述输出轴的所述旋转的方向中的一个上;以及离合器,其在来自所述旋转阻尼器的所述阻力的传递与不传递之间切换。
步行辅助装置.pdf
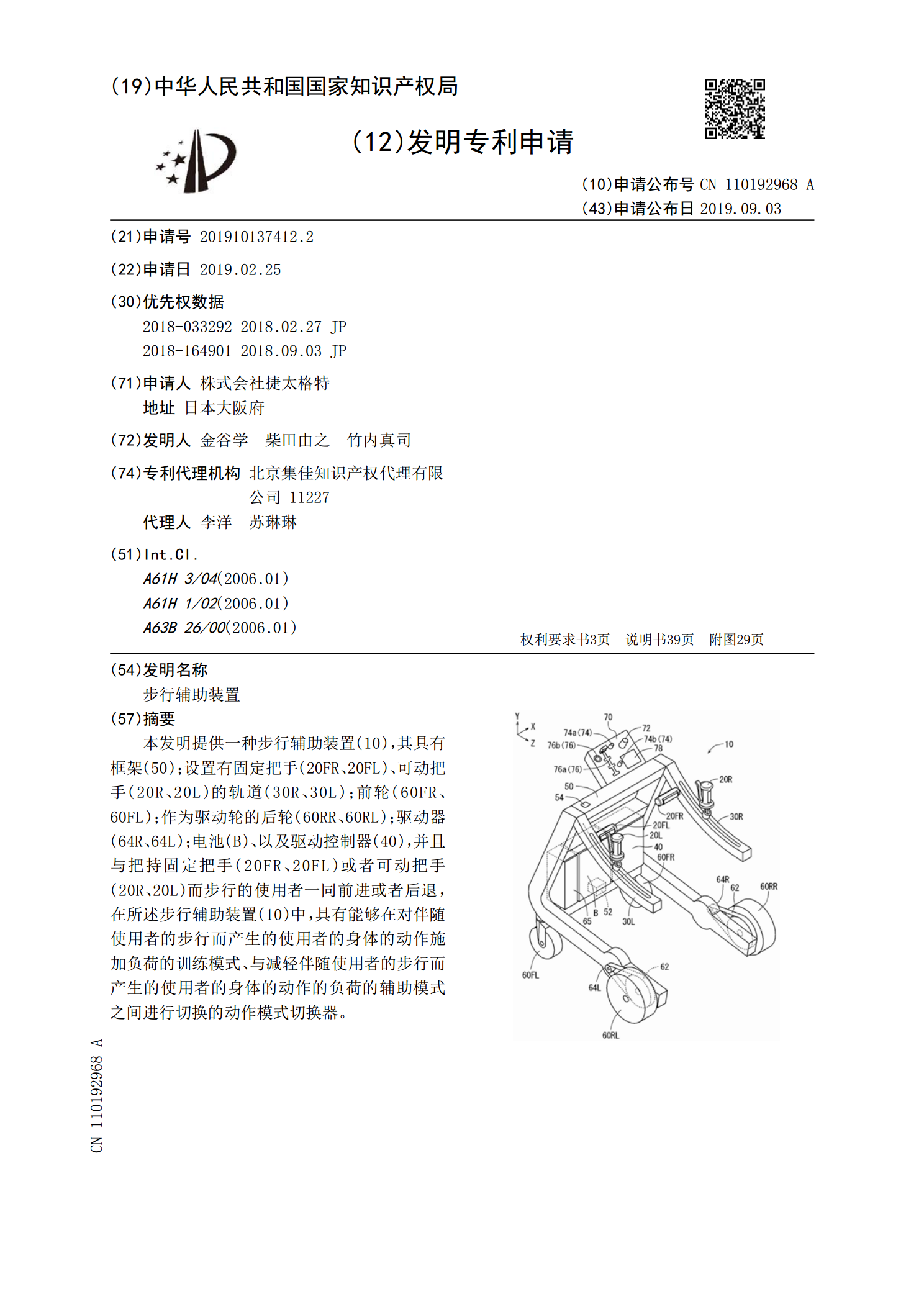
本发明提供一种步行辅助装置(10),其具有框架(50);设置有固定把手(20FR、20FL)、可动把手(20R、20L)的轨道(30R、30L);前轮(60FR、60FL);作为驱动轮的后轮(60RR、60RL);驱动器(64R、64L);电池(B)、以及驱动控制器(40),并且与把持固定把手(20FR、20FL)或者可动把手(20R、20L)而步行的使用者一同前进或者后退,在所述步行辅助装置(10)中,具有能够在对伴随使用者的步行而产生的使用者的身体的动作施加负荷的训练模式、与减轻伴随使用者的步行而产生
步行辅助装置.pdf
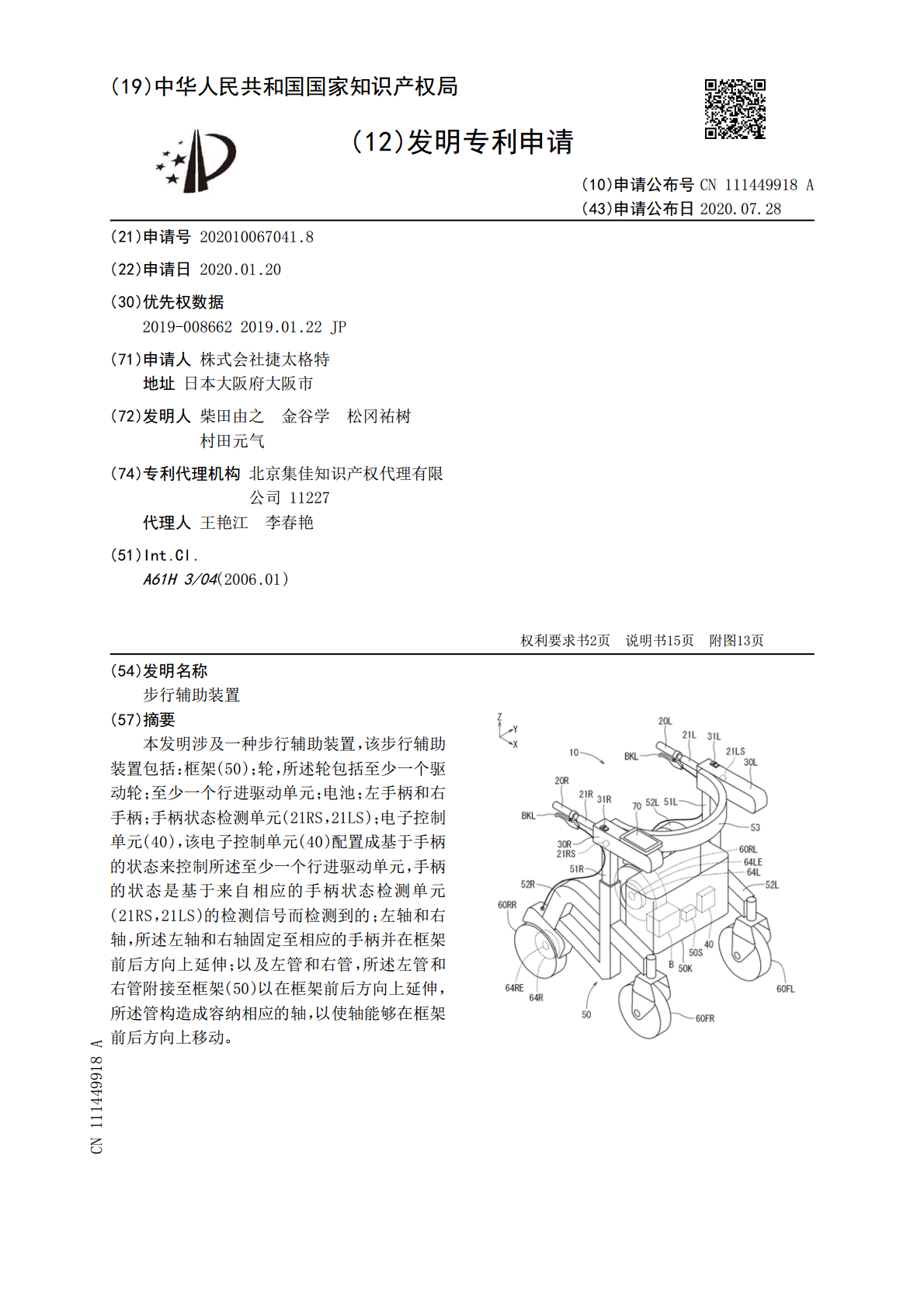
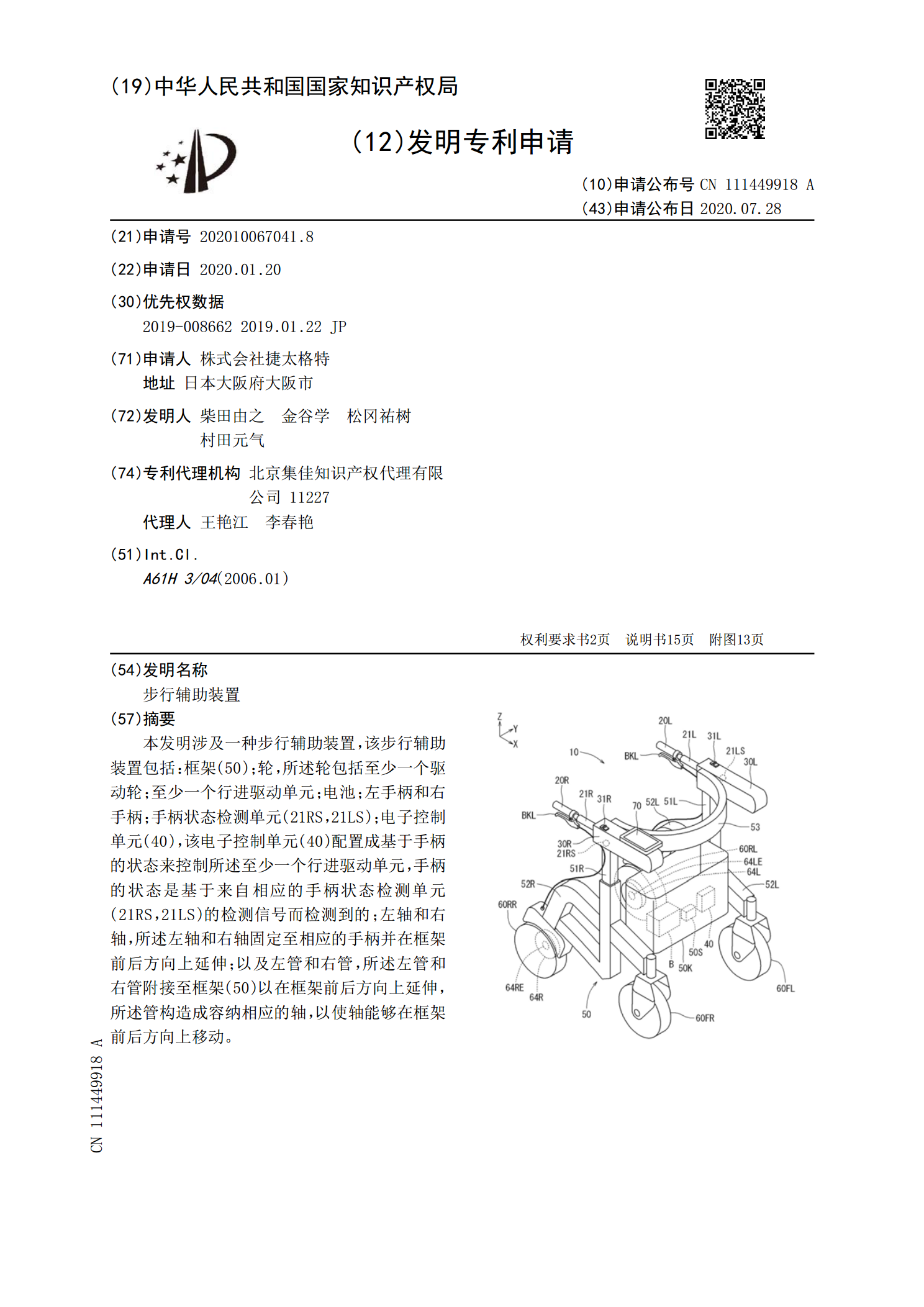
本发明涉及一种步行辅助装置,该步行辅助装置包括:框架(50);轮,所述轮包括至少一个驱动轮;至少一个行进驱动单元;电池;左手柄和右手柄;手柄状态检测单元(21RS,21LS);电子控制单元(40),该电子控制单元(40)配置成基于手柄的状态来控制所述至少一个行进驱动单元,手柄的状态是基于来自相应的手柄状态检测单元(21RS,21LS)的检测信号而检测到的;左轴和右轴,所述左轴和右轴固定至相应的手柄并在框架前后方向上延伸;以及左管和右管,所述左管和右管附接至框架(50)以在框架前后方向上延伸,所述管构造成容
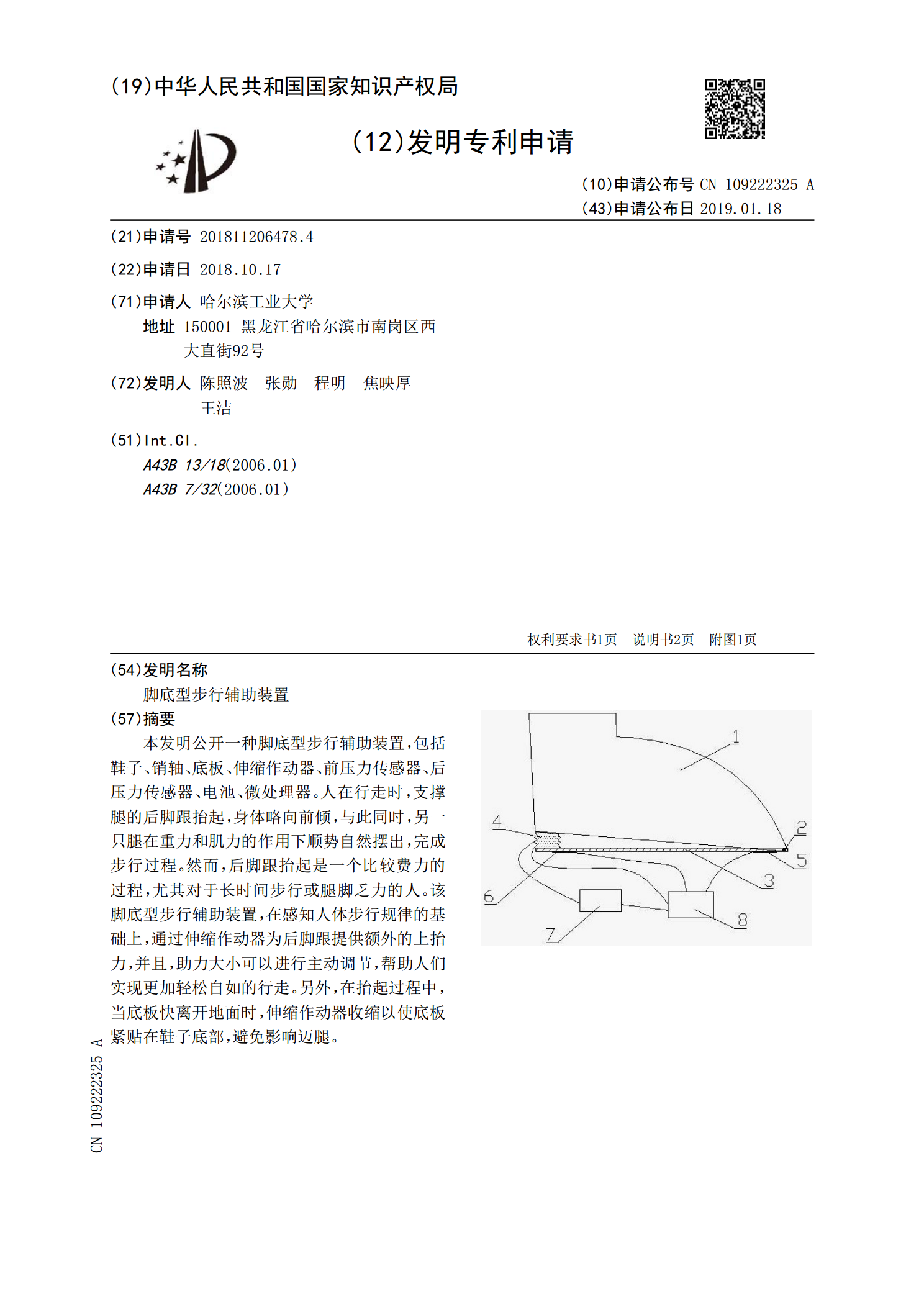
脚底型步行辅助装置.pdf
本发明公开一种脚底型步行辅助装置,包括鞋子、销轴、底板、伸缩作动器、前压力传感器、后压力传感器、电池、微处理器。人在行走时,支撑腿的后脚跟抬起,身体略向前倾,与此同时,另一只腿在重力和肌力的作用下顺势自然摆出,完成步行过程。然而,后脚跟抬起是一个比较费力的过程,尤其对于长时间步行或腿脚乏力的人。该脚底型步行辅助装置,在感知人体步行规律的基础上,通过伸缩作动器为后脚跟提供额外的上抬力,并且,助力大小可以进行主动调节,帮助人们实现更加轻松自如的行走。另外,在抬起过程中,当底板快离开地面时,伸缩作动器收缩以使底