
管道内壁行走检测机器人及系统.pdf

代瑶****zy


1/7

2/7

3/7

4/7
5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
管道内壁行走检测机器人及系统.pdf
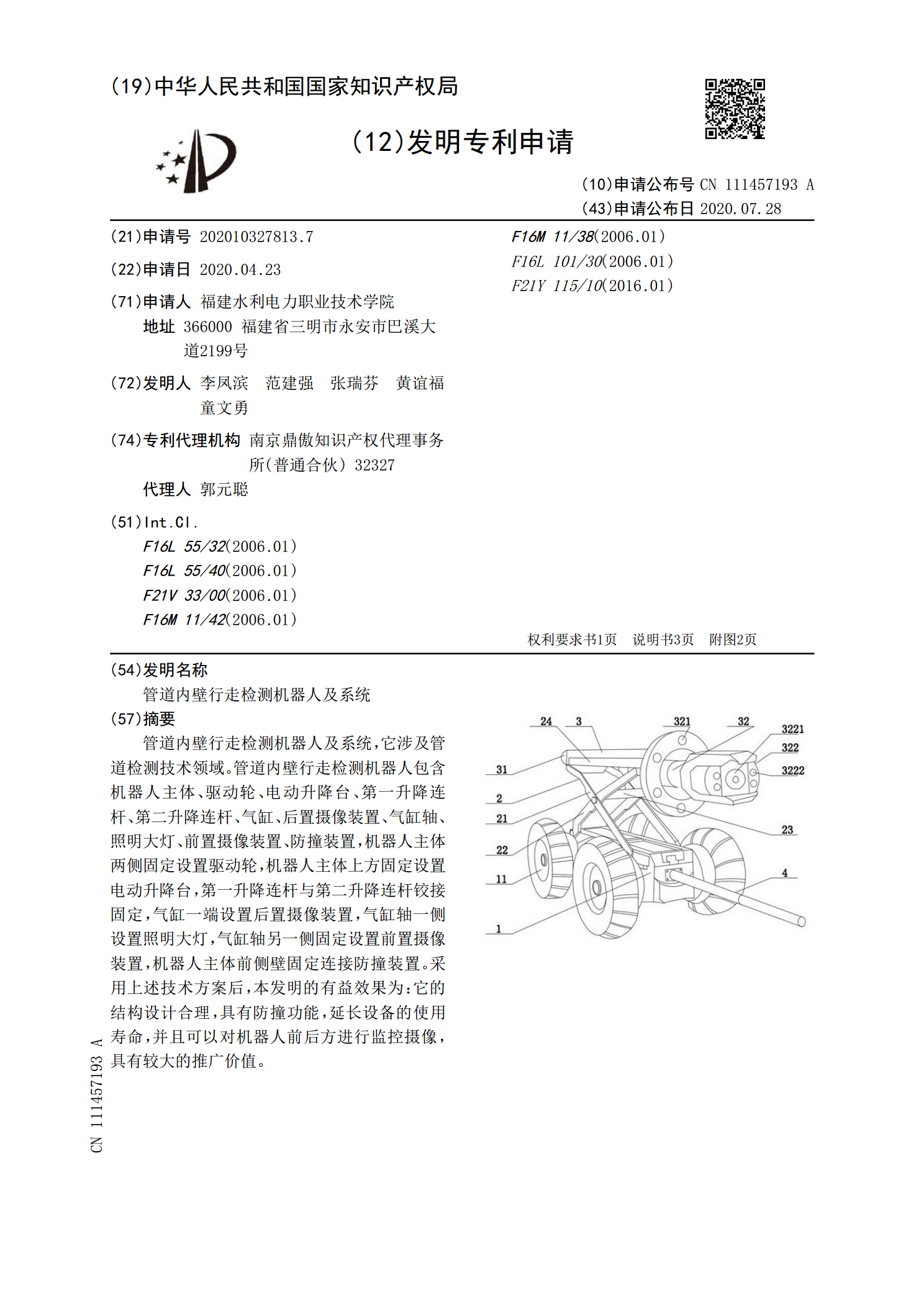
管道内壁行走检测机器人及系统,它涉及管道检测技术领域。管道内壁行走检测机器人包含机器人主体、驱动轮、电动升降台、第一升降连杆、第二升降连杆、气缸、后置摄像装置、气缸轴、照明大灯、前置摄像装置、防撞装置,机器人主体两侧固定设置驱动轮,机器人主体上方固定设置电动升降台,第一升降连杆与第二升降连杆铰接固定,气缸一端设置后置摄像装置,气缸轴一侧设置照明大灯,气缸轴另一侧固定设置前置摄像装置,机器人主体前侧壁固定连接防撞装置。采用上述技术方案后,本发明的有益效果为:它的结构设计合理,具有防撞功能,延长设备的使用寿命

内壁检测机器人和管道检测系统.pdf
本发明的实施例提供了一种内壁检测机器人和管道检测系统,涉及管道机器人领域。该内壁检测机器人包括检测鼓板、支撑组件和调节组件;支撑组件包括支撑转轴、支撑端板和支撑轮,支撑端板的数量为两个,两个支撑端板分别设置在支撑转轴的两端,支撑转轴与支撑端板转动连接,支撑轮的数量为多个,多个支撑轮分别设置在两个支撑端板上;检测鼓板的数量为多个,多个检测鼓板环绕支撑转轴设置;调节组件与多个检测鼓板传动连接并设置于支撑转轴上,用于带动检测鼓板靠近或远离支撑转轴;支撑转轴用于带动检测鼓板绕支撑转轴的轴线转动。上述的内壁检测机器

一种智能管道内壁行走机器人.pdf
一种智能管道内壁行走机器人,包括两个机体,两个机体之间通过万向节进行连接,机体的未连接的两个端部分别安装有行走机构与伸缩腿结构;在工作过程中,通过远程连接WIFI模块,控制主动轮,电机驱动主动轮,主动轮带动机体在管道内部进行移动;在遇到弯道的情况下,通过调节两个主动轮电机转速,使两轮转速不同步即可实现转弯;在遇到管道突然变径时,通过伸缩机构实现管径适应,具体为管壁对主动轮和从动轮施加压力,使三个机腿向内收拢,同时带动滑套压缩弹簧,待管径恢复正常后,由弹簧推动滑套进而带动机腿向外扩张,以适应新的管径;本发明

行走系统及管道机器人.pdf
本发明行走系统及管道机器人涉及机器人技术领域。其目的是为了提供一种体积小、适用性强的行走系统及具有这种行走系统的管道机器人。本发明管道机器人包括行走系统、淤泥输送系统和淤泥粉碎系统。行走系统包括行走动力机构、行走履带机构、机体支撑机构和履带导向涨紧机构,行走动力机构用于向系统提供动力,机体支撑机构包括承重轮,承重轮安装在承重轮支架上,承重轮支架与第一伸缩油缸的活塞杆连接,履带导向涨紧机构包括第二伸缩油缸,第二伸缩油缸的活塞杆连接涨紧支架,带动涨紧轮运动,涨紧轮与履带内侧面相接触。淤泥输送系统包括输送泵体总

管道内壁的检测系统、检测方法及应用.pdf
本发明涉及管道检测技术领域,提供一种管道内壁的检测系统、检测方法及应用,检测系统包括:检测机器人本体(1)、圆环形激光器(2)、相机(3)、点激光器(4)、标板(5)和支撑架(6);所述检测机器人本体(1)可在管道(11)内壁行走,所述相机(3)设置在检测机器人本体(1)的前部或后部,所述相机(3)的前方或后方设有标板(5)和圆环形激光器(2),标板(5)和圆环形激光器(2)通过支撑架(6)与检测机器人本体(1)固定连接,所述点激光器(4)设置在管道(11)的入口端,并向标板(5)投射激光点,相机(3)拍