
管道内壁的检测系统、检测方法及应用.pdf

宜欣****外呢


1/7

2/7

3/7
4/7

5/7
6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

管道内壁的检测系统、检测方法及应用.pdf
本发明涉及管道检测技术领域,提供一种管道内壁的检测系统、检测方法及应用,检测系统包括:检测机器人本体(1)、圆环形激光器(2)、相机(3)、点激光器(4)、标板(5)和支撑架(6);所述检测机器人本体(1)可在管道(11)内壁行走,所述相机(3)设置在检测机器人本体(1)的前部或后部,所述相机(3)的前方或后方设有标板(5)和圆环形激光器(2),标板(5)和圆环形激光器(2)通过支撑架(6)与检测机器人本体(1)固定连接,所述点激光器(4)设置在管道(11)的入口端,并向标板(5)投射激光点,相机(3)拍

内壁检测机器人和管道检测系统.pdf
本发明的实施例提供了一种内壁检测机器人和管道检测系统,涉及管道机器人领域。该内壁检测机器人包括检测鼓板、支撑组件和调节组件;支撑组件包括支撑转轴、支撑端板和支撑轮,支撑端板的数量为两个,两个支撑端板分别设置在支撑转轴的两端,支撑转轴与支撑端板转动连接,支撑轮的数量为多个,多个支撑轮分别设置在两个支撑端板上;检测鼓板的数量为多个,多个检测鼓板环绕支撑转轴设置;调节组件与多个检测鼓板传动连接并设置于支撑转轴上,用于带动检测鼓板靠近或远离支撑转轴;支撑转轴用于带动检测鼓板绕支撑转轴的轴线转动。上述的内壁检测机器
管道内壁行走检测机器人及系统.pdf
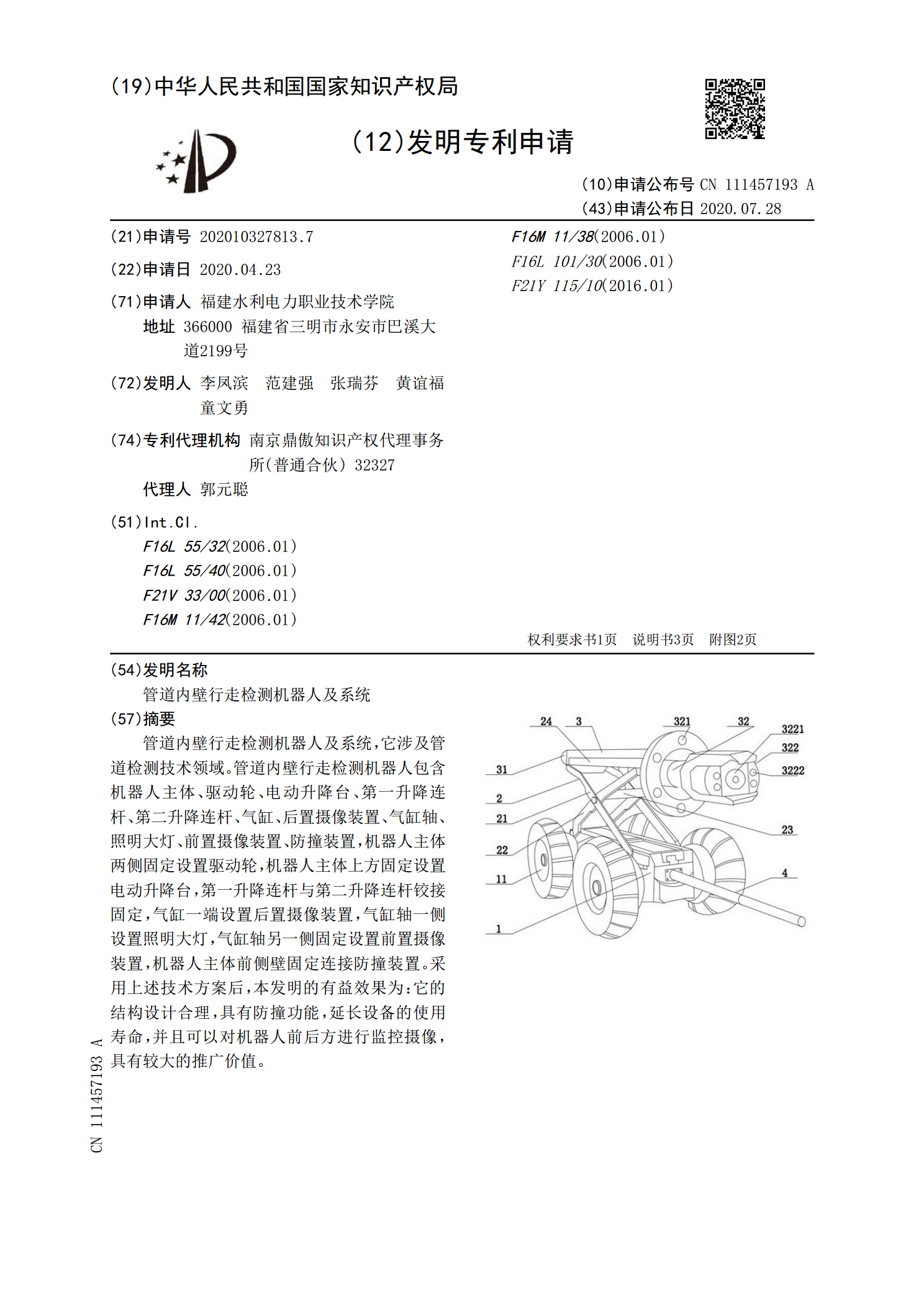
管道内壁行走检测机器人及系统,它涉及管道检测技术领域。管道内壁行走检测机器人包含机器人主体、驱动轮、电动升降台、第一升降连杆、第二升降连杆、气缸、后置摄像装置、气缸轴、照明大灯、前置摄像装置、防撞装置,机器人主体两侧固定设置驱动轮,机器人主体上方固定设置电动升降台,第一升降连杆与第二升降连杆铰接固定,气缸一端设置后置摄像装置,气缸轴一侧设置照明大灯,气缸轴另一侧固定设置前置摄像装置,机器人主体前侧壁固定连接防撞装置。采用上述技术方案后,本发明的有益效果为:它的结构设计合理,具有防撞功能,延长设备的使用寿命

内壁检测设备和内壁检测系统.pdf
本发明的实施例提供了一种内壁检测设备和内壁检测系统,涉及管道检测领域。该内壁检测设备包括第一鼓板、第二鼓板、第一伸缩组件、第二伸缩组件和支撑组件。支撑组件包括中心轴、两个支撑端板和多个支撑轮,两个支撑端板设置于中心轴的两端,多个支撑轮分别设置于两个支撑端板上。第一伸缩组件用于带动第一鼓板靠近或远离中心轴运动,第二伸缩组件用于在随第一鼓板运动时带动第二鼓板靠近或远离中心轴运动。多个第一鼓板和多个第二鼓板相互交错地拼接或多个第二鼓板拼接为环形,环形环绕中心轴。上述内壁检测设备和内壁检测系统能够灵活适应不同管径

消防水管道内壁腐蚀超声导波检测应用.docx
消防水管道内壁腐蚀超声导波检测应用一、引言消防水管道是建筑物中非常重要的设施之一,其功能是在火灾发生时及时为消防员提供大量的水源。但由于长期流动的水会对管道内壁产生不同程度的腐蚀,导致管道变形、堵塞甚至破裂,从而影响消防水的供应。因此,对消防水管道腐蚀情况的检测及时发现腐蚀现象、采取相应的维修措施,是确保消防水系统运行的重要环节。现代科技的发展使得超声导波检测技术在消防水管道内壁腐蚀检测中应用广泛,本文就消防水管道内壁腐蚀超声导波检测的应用展开探讨。二、超声导波检测原理超声导波检测是使用、传播在管道内的超