
齿轮齿条传动式自动换行的光伏板监测装置与方法.pdf

一条****丹淑

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
齿轮齿条传动式自动换行的光伏板监测装置与方法.pdf
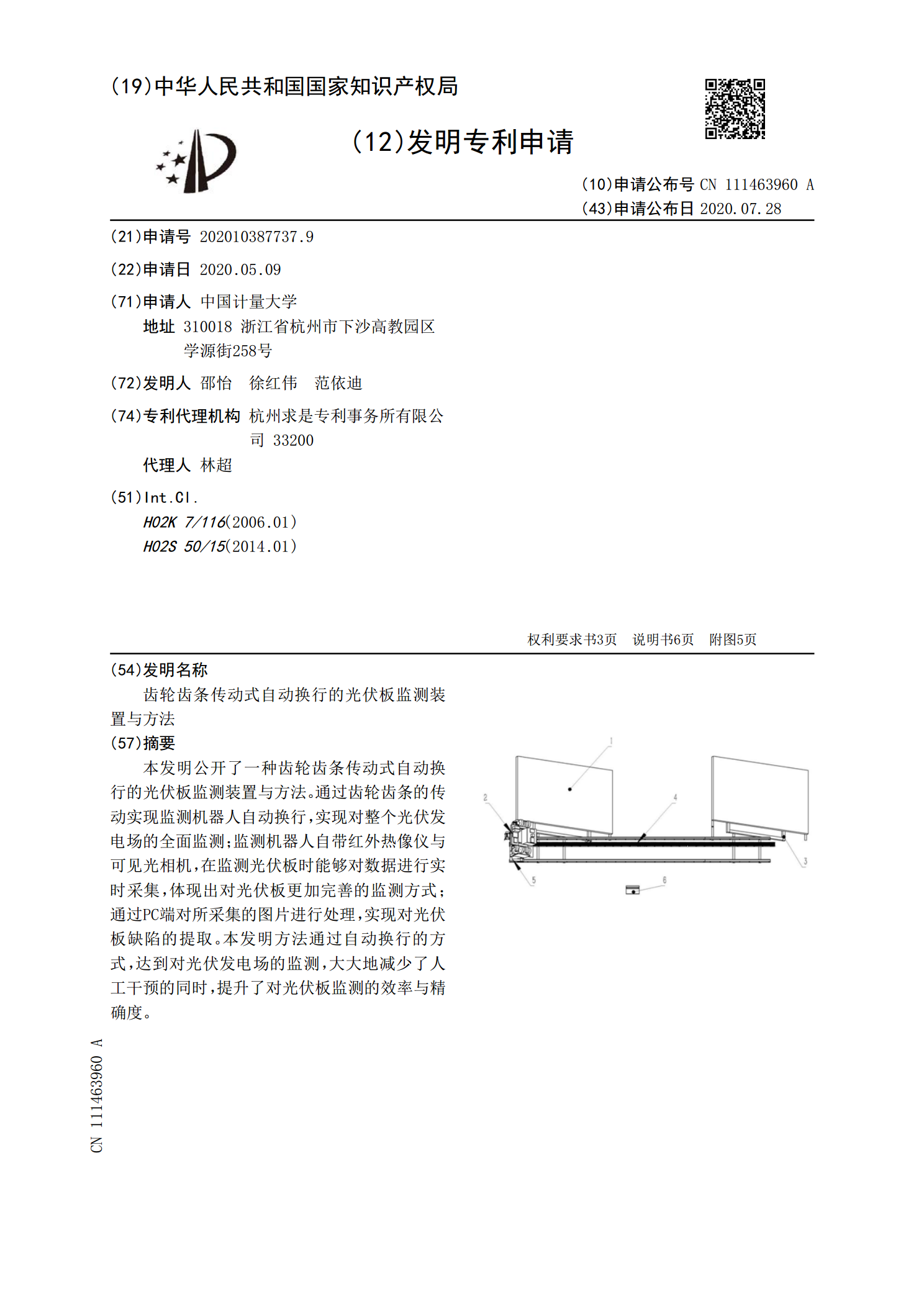
本发明公开了一种齿轮齿条传动式自动换行的光伏板监测装置与方法。通过齿轮齿条的传动实现监测机器人自动换行,实现对整个光伏发电场的全面监测;监测机器人自带红外热像仪与可见光相机,在监测光伏板时能够对数据进行实时采集,体现出对光伏板更加完善的监测方式;通过PC端对所采集的图片进行处理,实现对光伏板缺陷的提取。本发明方法通过自动换行的方式,达到对光伏发电场的监测,大大地减少了人工干预的同时,提升了对光伏板监测的效率与精确度。
光伏板清洗机自动换行装置.pdf
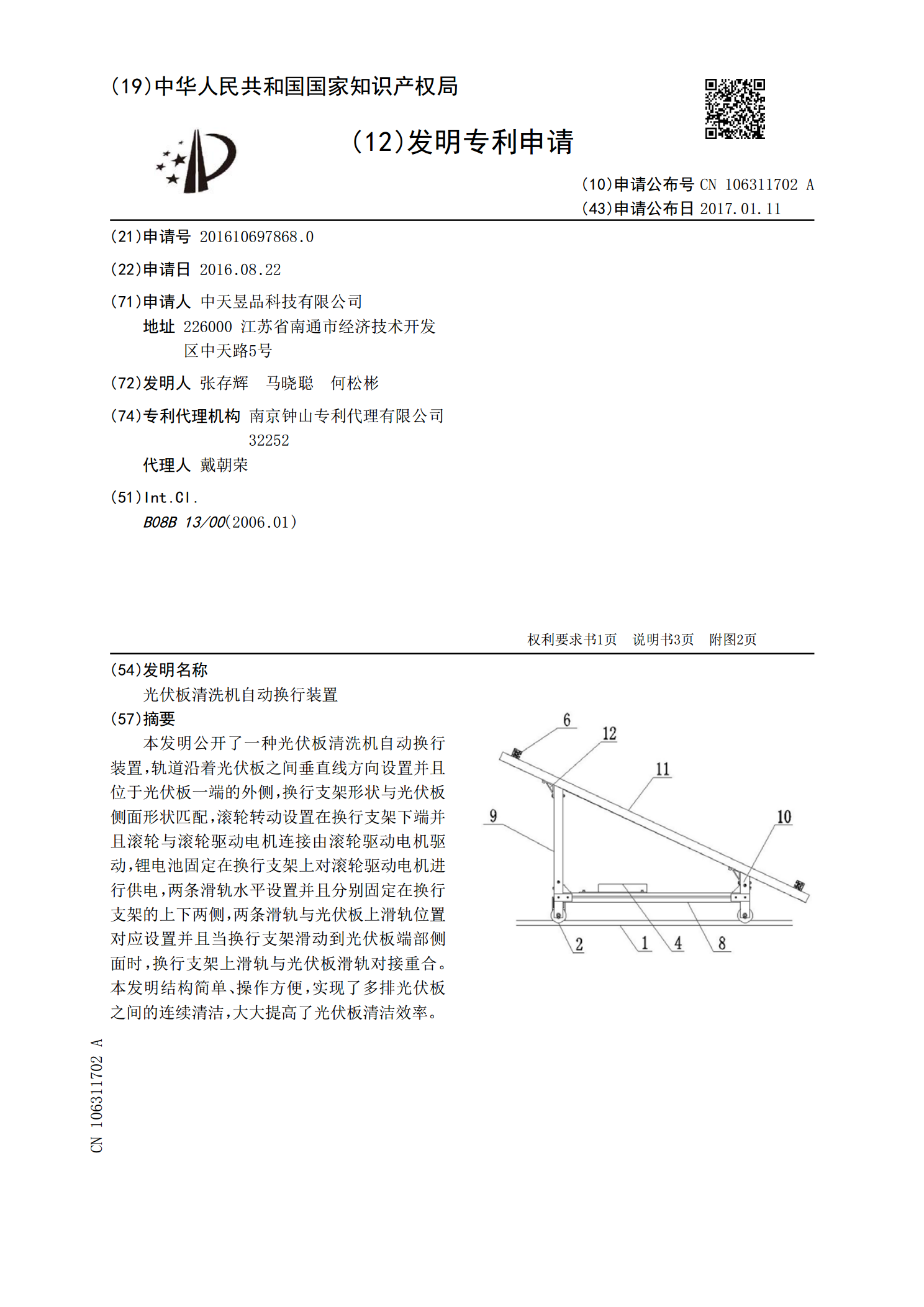
本发明公开了一种光伏板清洗机自动换行装置,轨道沿着光伏板之间垂直线方向设置并且位于光伏板一端的外侧,换行支架形状与光伏板侧面形状匹配,滚轮转动设置在换行支架下端并且滚轮与滚轮驱动电机连接由滚轮驱动电机驱动,锂电池固定在换行支架上对滚轮驱动电机进行供电,两条滑轨水平设置并且分别固定在换行支架的上下两侧,两条滑轨与光伏板上滑轨位置对应设置并且当换行支架滑动到光伏板端部侧面时,换行支架上滑轨与光伏板滑轨对接重合。本发明结构简单、操作方便,实现了多排光伏板之间的连续清洁,大大提高了光伏板清洁效率。
复合齿条齿轮传动装置.pdf
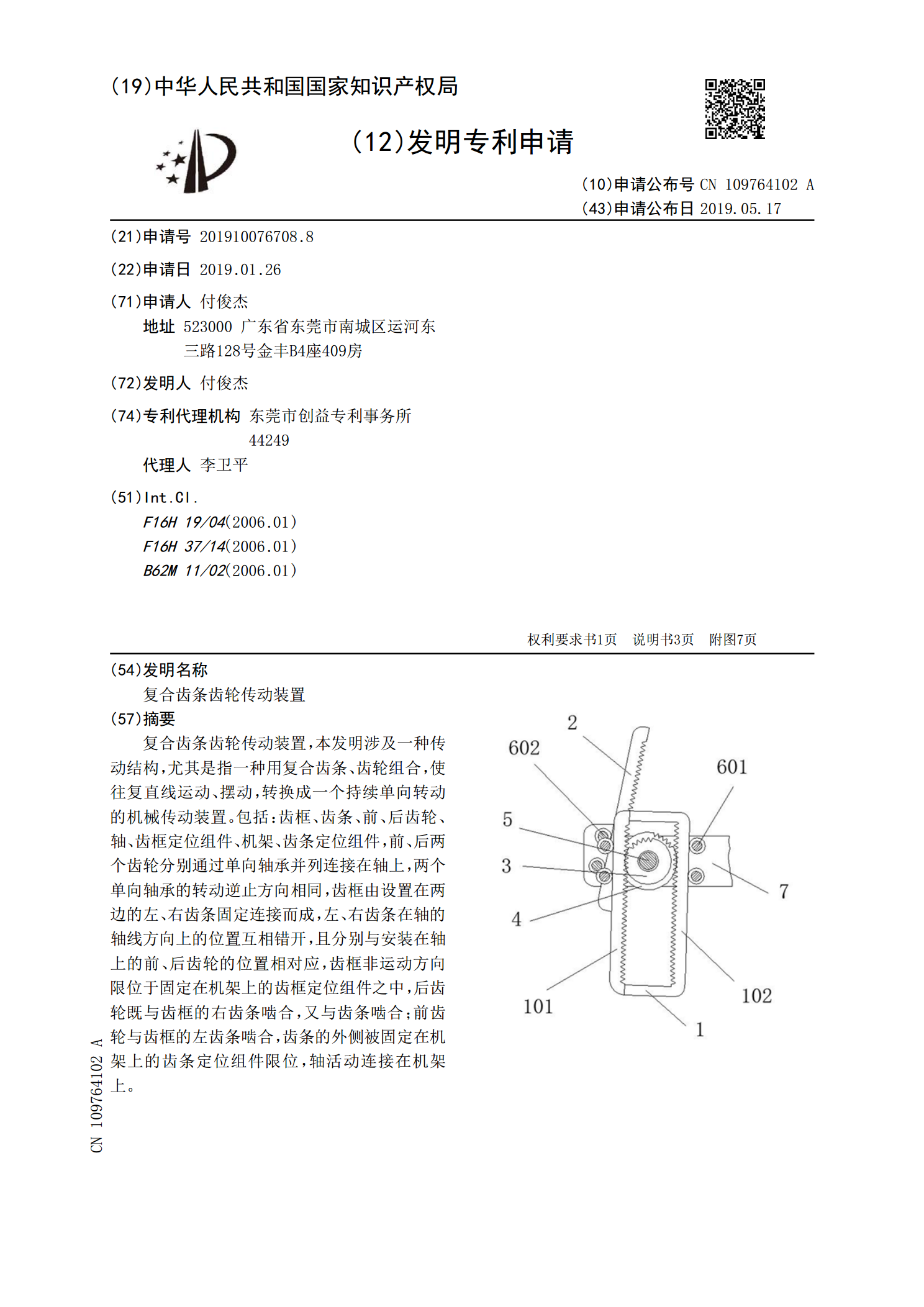
复合齿条齿轮传动装置,本发明涉及一种传动结构,尤其是指一种用复合齿条、齿轮组合,使往复直线运动、摆动,转换成一个持续单向转动的机械传动装置。包括:齿框、齿条、前、后齿轮、轴、齿框定位组件、机架、齿条定位组件,前、后两个齿轮分别通过单向轴承并列连接在轴上,两个单向轴承的转动逆止方向相同,齿框由设置在两边的左、右齿条固定连接而成,左、右齿条在轴的轴线方向上的位置互相错开,且分别与安装在轴上的前、后齿轮的位置相对应,齿框非运动方向限位于固定在机架上的齿框定位组件之中,后齿轮既与齿框的右齿条啮合,又与齿条啮合;前
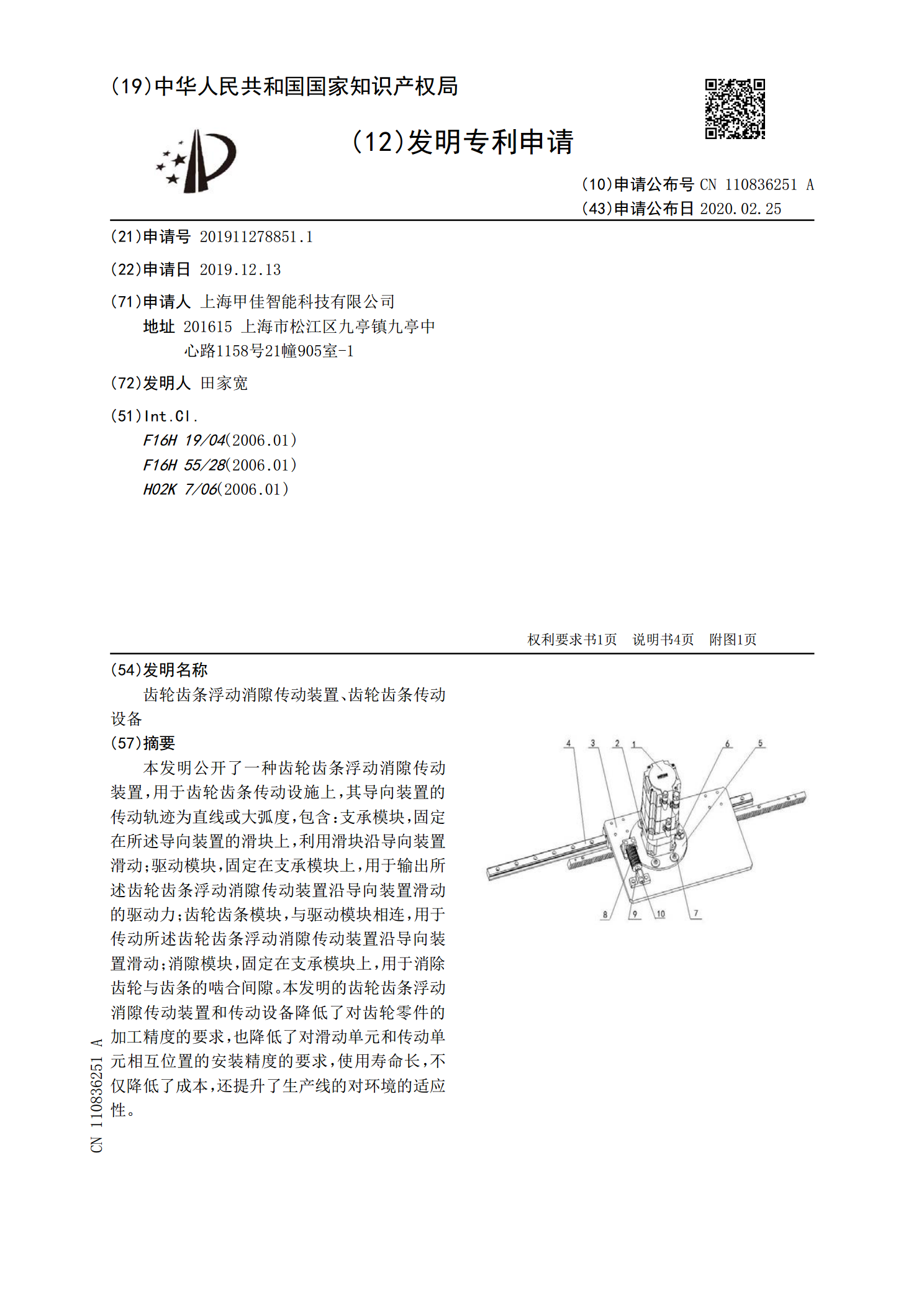
齿轮齿条浮动消隙传动装置、齿轮齿条传动设备.pdf
本发明公开了一种齿轮齿条浮动消隙传动装置,用于齿轮齿条传动设施上,其导向装置的传动轨迹为直线或大弧度,包含:支承模块,固定在所述导向装置的滑块上,利用滑块沿导向装置滑动;驱动模块,固定在支承模块上,用于输出所述齿轮齿条浮动消隙传动装置沿导向装置滑动的驱动力;齿轮齿条模块,与驱动模块相连,用于传动所述齿轮齿条浮动消隙传动装置沿导向装置滑动;消隙模块,固定在支承模块上,用于消除齿轮与齿条的啮合间隙。本发明的齿轮齿条浮动消隙传动装置和传动设备降低了对齿轮零件的加工精度的要求,也降低了对滑动单元和传动单元相互位置
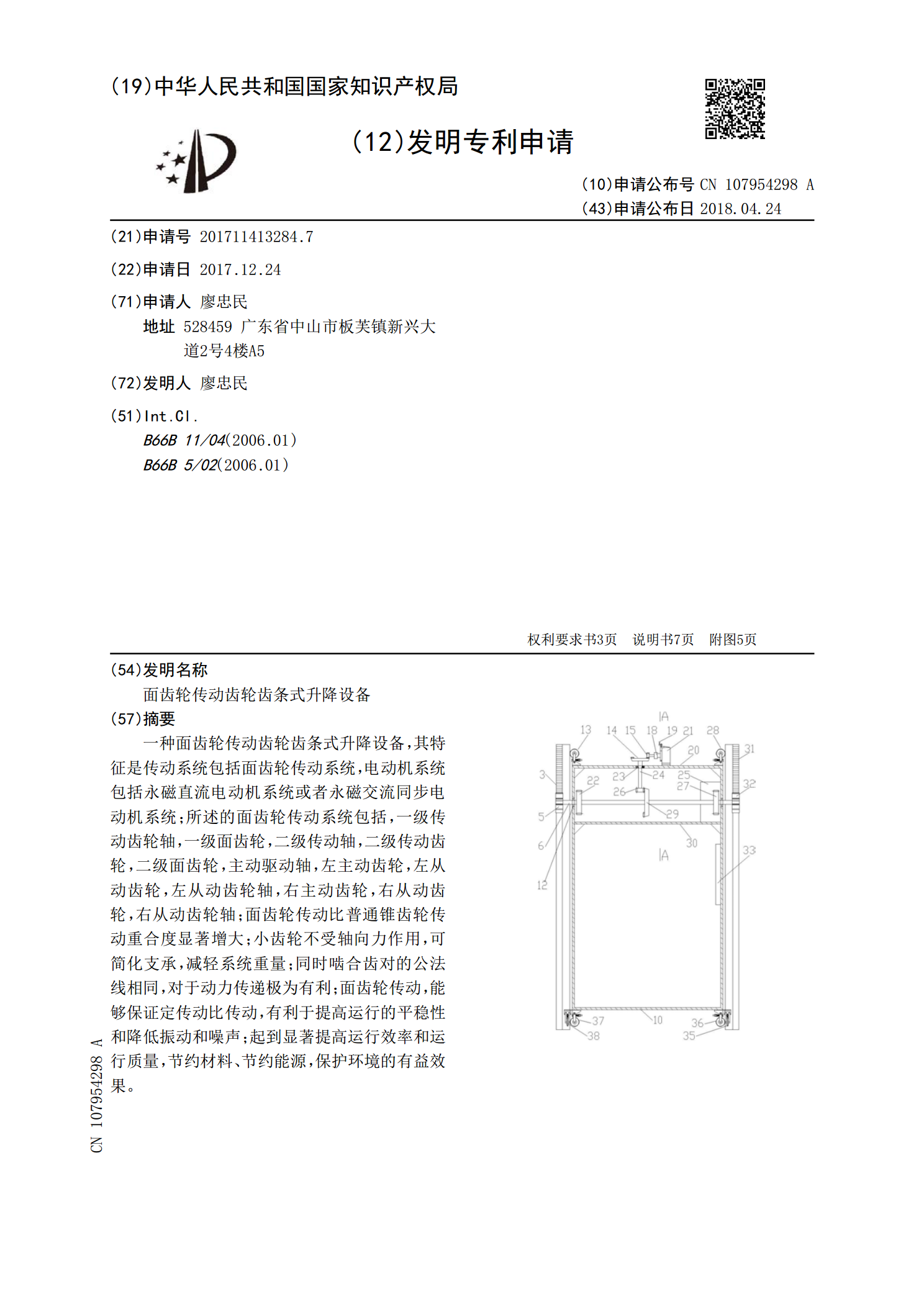
面齿轮传动齿轮齿条式升降设备.pdf
一种面齿轮传动齿轮齿条式升降设备,其特征是传动系统包括面齿轮传动系统,电动机系统包括永磁直流电动机系统或者永磁交流同步电动机系统;所述的面齿轮传动系统包括,一级传动齿轮轴,一级面齿轮,二级传动轴,二级传动齿轮,二级面齿轮,主动驱动轴,左主动齿轮,左从动齿轮,左从动齿轮轴,右主动齿轮,右从动齿轮,右从动齿轮轴;面齿轮传动比普通锥齿轮传动重合度显著增大;小齿轮不受轴向力作用,可简化支承,减轻系统重量;同时啮合齿对的公法线相同,对于动力传递极为有利;面齿轮传动,能够保证定传动比传动,有利于提高运行的平稳性和降低