
一种轮式管道内壁清扫检测机器人.pdf

论文****轩吖


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种轮式管道内壁清扫检测机器人.pdf
本发明公开了一种轮式管道内壁清扫检测机器人,主要适用于管径在250‑380mm管道,包括:轴向依次连接设置的控制室、轮式行走牵引装置、清扫装置;轮式行走牵引装置包括:调节组件、前变径驱动组件;清扫装置包括:后变径驱动组件、清扫组件;控制室可拆卸的固定于轮式行走牵引装置上;轮式行走牵引装置与清扫装置柔性连接;调节组件四周设有数个前变径驱动组件,轮式行走牵引装置通过前变径驱动组件与管内壁贴合在管内行走;清扫组件四周设有数个后变径驱动组件,清扫装置通过后变径驱动组件与管内壁贴合在管内行走。本发明可以提供较大的牵
管道内壁清扫机器人.pdf
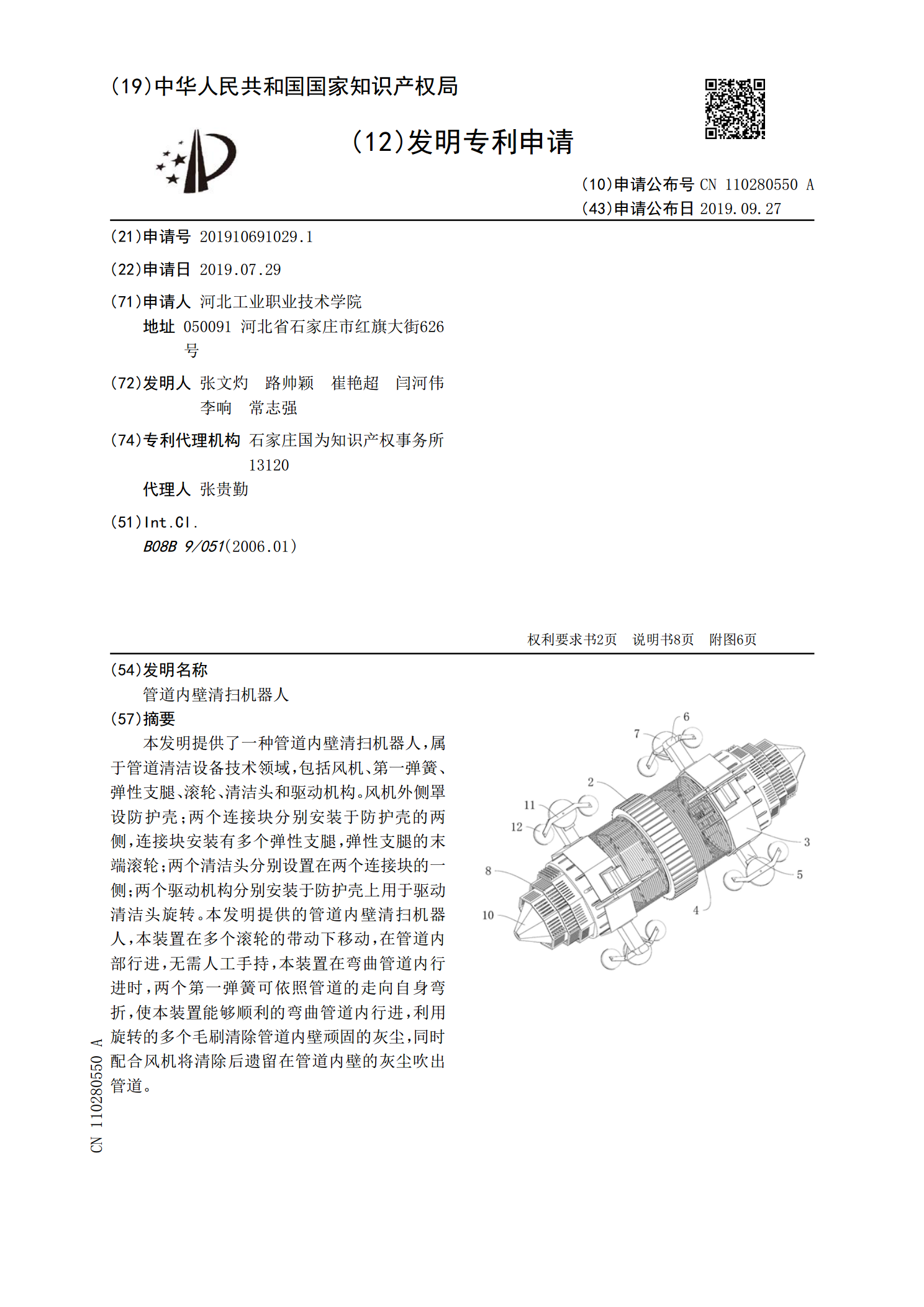
本发明提供了一种管道内壁清扫机器人,属于管道清洁设备技术领域,包括风机、第一弹簧、弹性支腿、滚轮、清洁头和驱动机构。风机外侧罩设防护壳;两个连接块分别安装于防护壳的两侧,连接块安装有多个弹性支腿,弹性支腿的末端滚轮;两个清洁头分别设置在两个连接块的一侧;两个驱动机构分别安装于防护壳上用于驱动清洁头旋转。本发明提供的管道内壁清扫机器人,本装置在多个滚轮的带动下移动,在管道内部行进,无需人工手持,本装置在弯曲管道内行进时,两个第一弹簧可依照管道的走向自身弯折,使本装置能够顺利的弯曲管道内行进,利用旋转的多个毛
一种轮式管道检测机器人.pdf
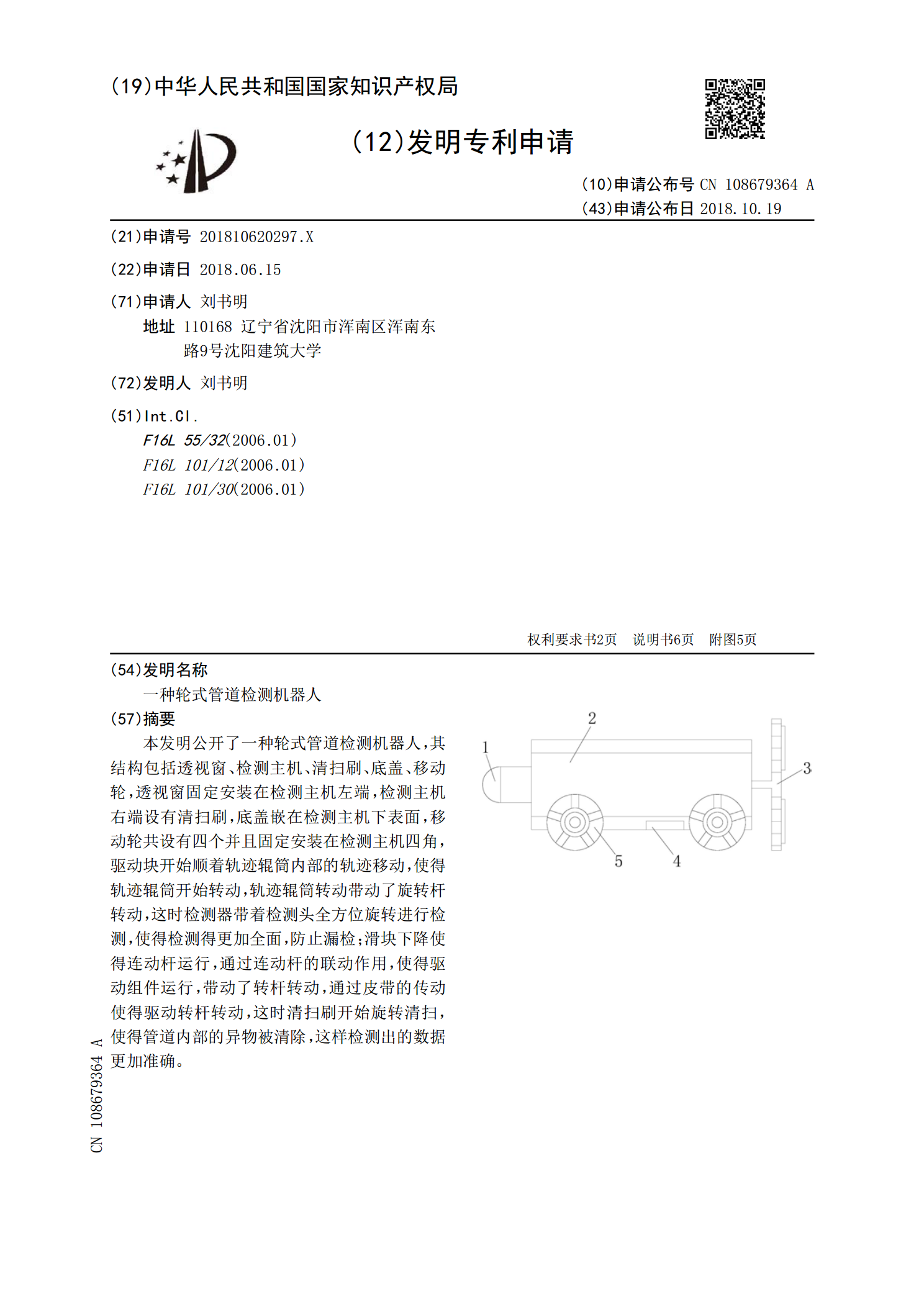
本发明公开了一种轮式管道检测机器人,其结构包括透视窗、检测主机、清扫刷、底盖、移动轮,透视窗固定安装在检测主机左端,检测主机右端设有清扫刷,底盖嵌在检测主机下表面,移动轮共设有四个并且固定安装在检测主机四角,驱动块开始顺着轨迹辊筒内部的轨迹移动,使得轨迹辊筒开始转动,轨迹辊筒转动带动了旋转杆转动,这时检测器带着检测头全方位旋转进行检测,使得检测得更加全面,防止漏检;滑块下降使得连动杆运行,通过连动杆的联动作用,使得驱动组件运行,带动了转杆转动,通过皮带的传动使得驱动转杆转动,这时清扫刷开始旋转清扫,使得管

轮式管道检测机器人.pdf
本发明公开了轮式管道检测机器人,包括固定安装在轮式行走车体上的喷料座体以及固定安装在所述轮式行走车体上的支撑座体,所述喷料座体顶部端面内设有储料箱体,所述储料箱体顶部端面内设有储料腔,所述储料腔右侧壁连通设有L型喷料管,所述L型喷料管转动配合安装在所述喷料座体右侧端面内且末端安装有喷料机构,所述L型喷料管外周的所述喷料座体内设有空腔,所述空腔内的所述L型喷料管外周固设有从动齿轮,所述储料箱体内转动配合安装有搅拌主轴,所述搅拌主轴外周固设有多组搅料页片,所述储料纤体底端的所述喷料座体内设有传动滑腔,所述搅拌

内壁检测机器人和管道检测系统.pdf
本发明的实施例提供了一种内壁检测机器人和管道检测系统,涉及管道机器人领域。该内壁检测机器人包括检测鼓板、支撑组件和调节组件;支撑组件包括支撑转轴、支撑端板和支撑轮,支撑端板的数量为两个,两个支撑端板分别设置在支撑转轴的两端,支撑转轴与支撑端板转动连接,支撑轮的数量为多个,多个支撑轮分别设置在两个支撑端板上;检测鼓板的数量为多个,多个检测鼓板环绕支撑转轴设置;调节组件与多个检测鼓板传动连接并设置于支撑转轴上,用于带动检测鼓板靠近或远离支撑转轴;支撑转轴用于带动检测鼓板绕支撑转轴的轴线转动。上述的内壁检测机器