
一种高楼玻璃自动爬行清洗机器人.pdf

诗文****仙女

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种高楼玻璃自动爬行清洗机器人.pdf
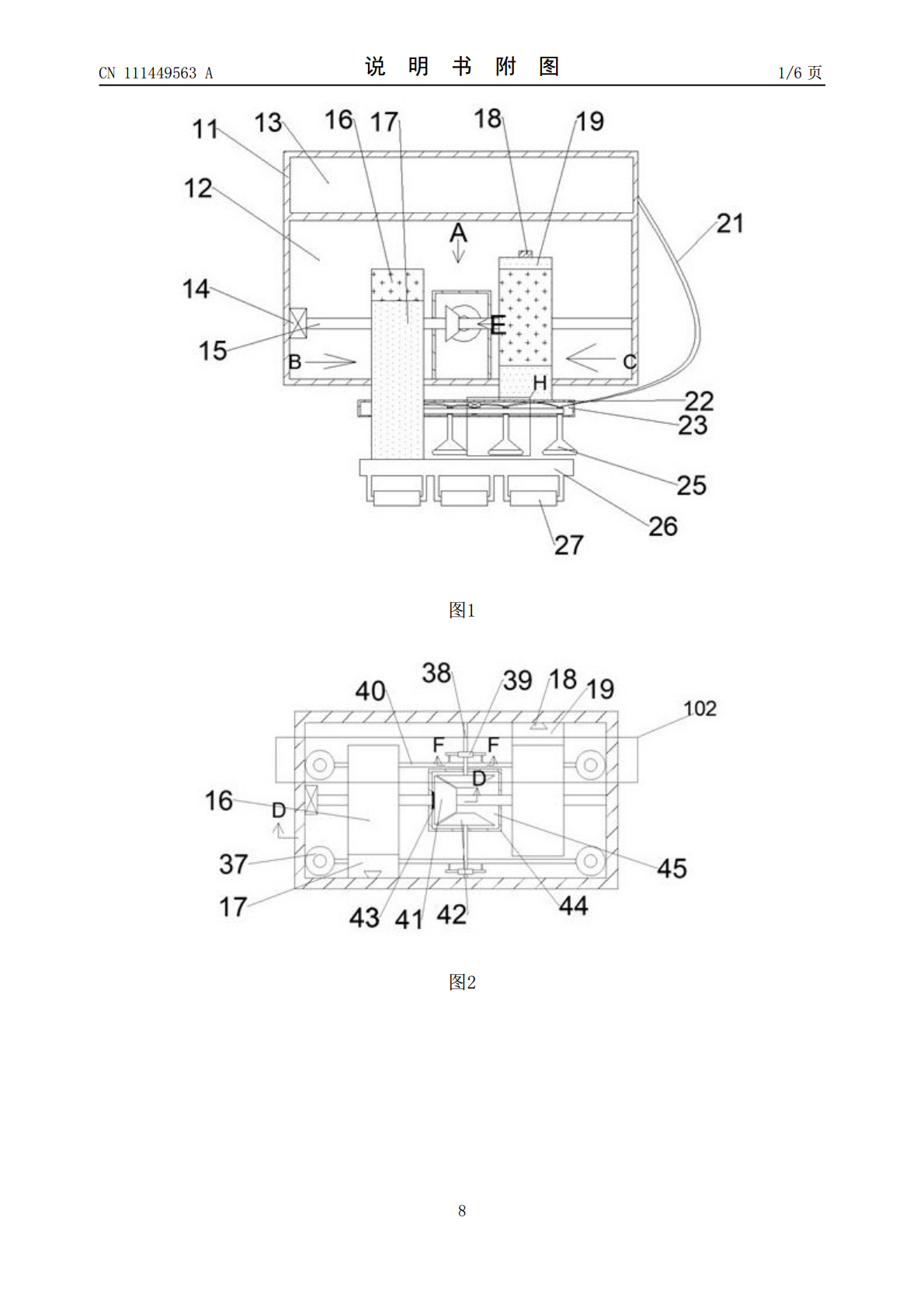
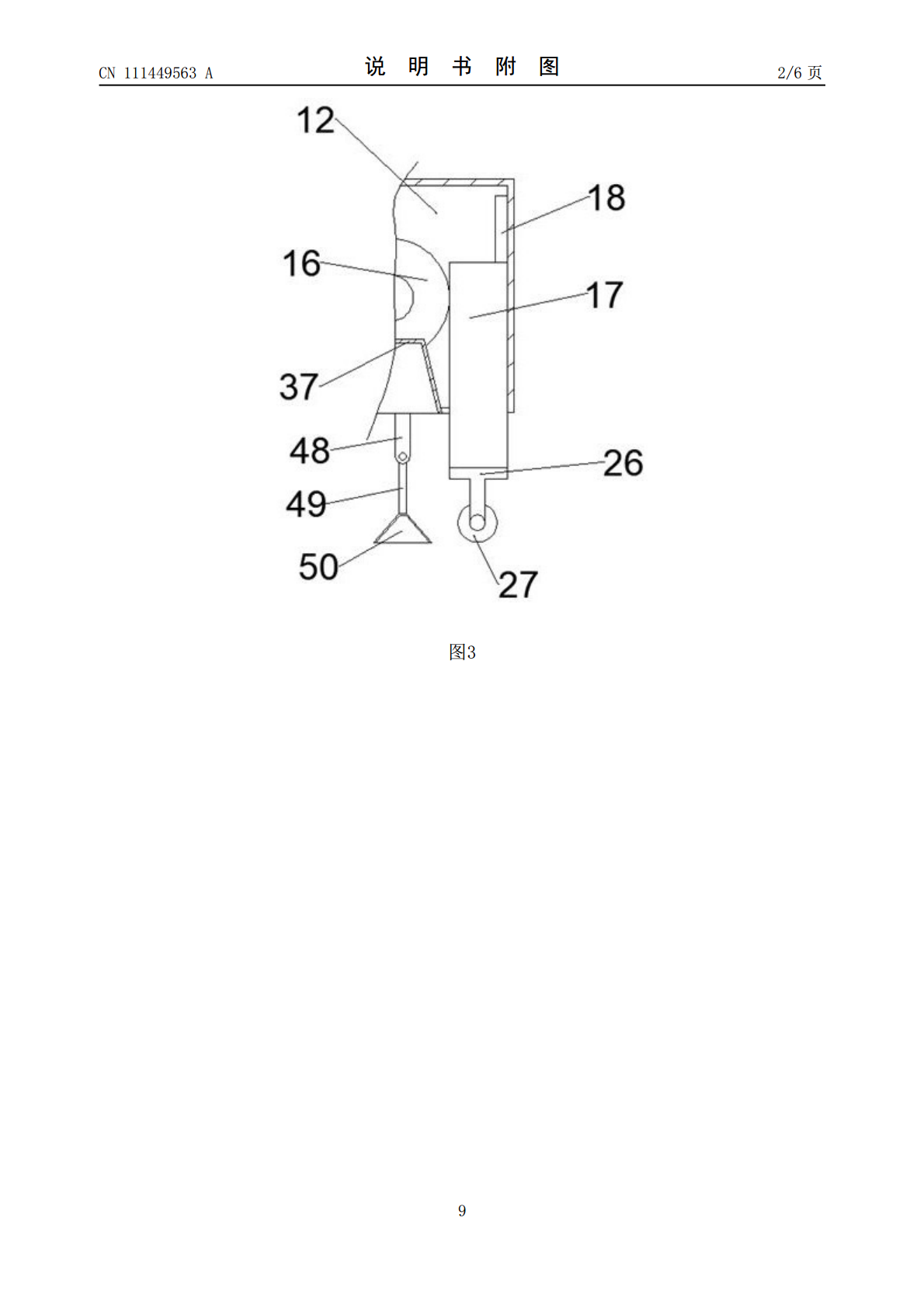
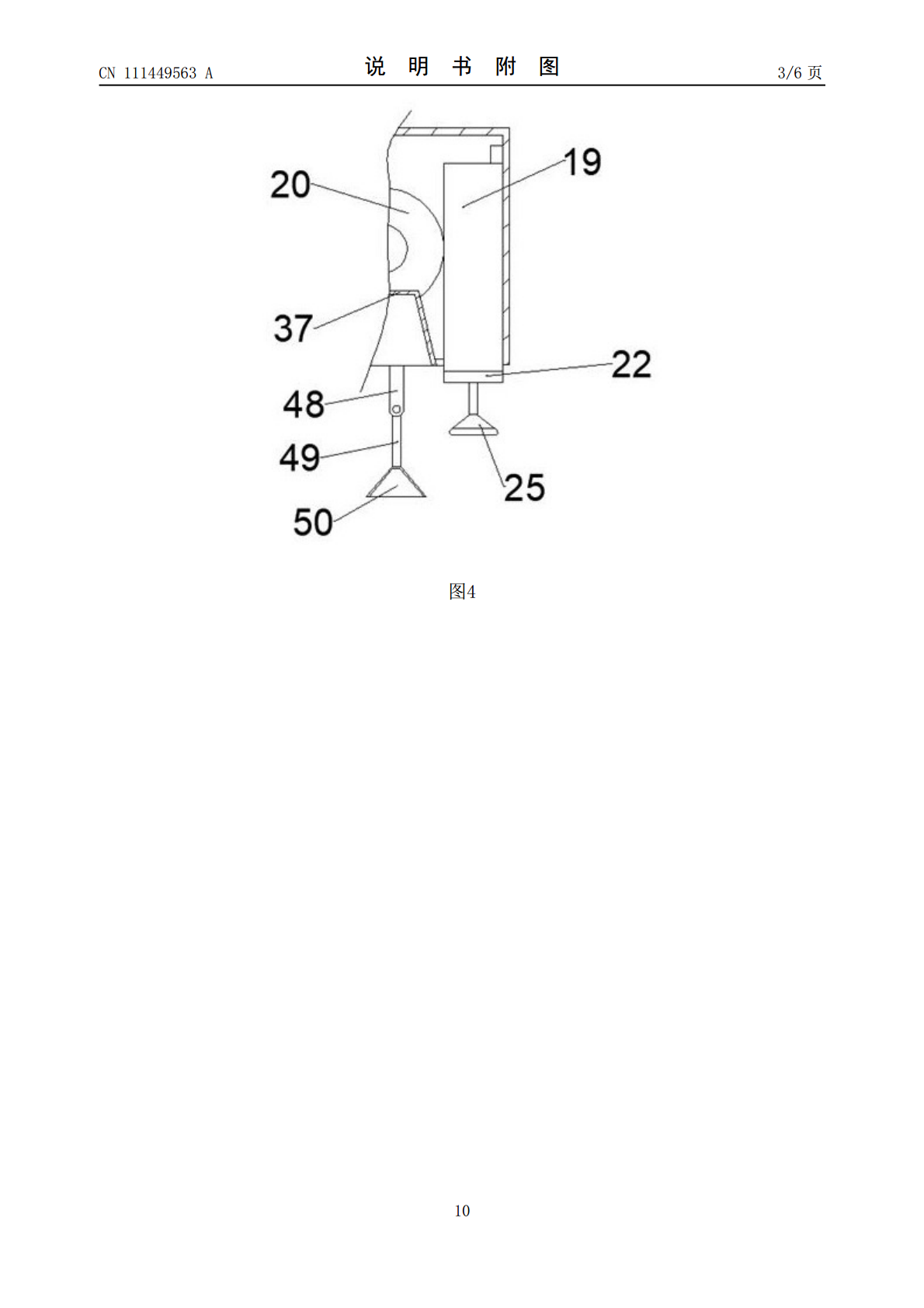
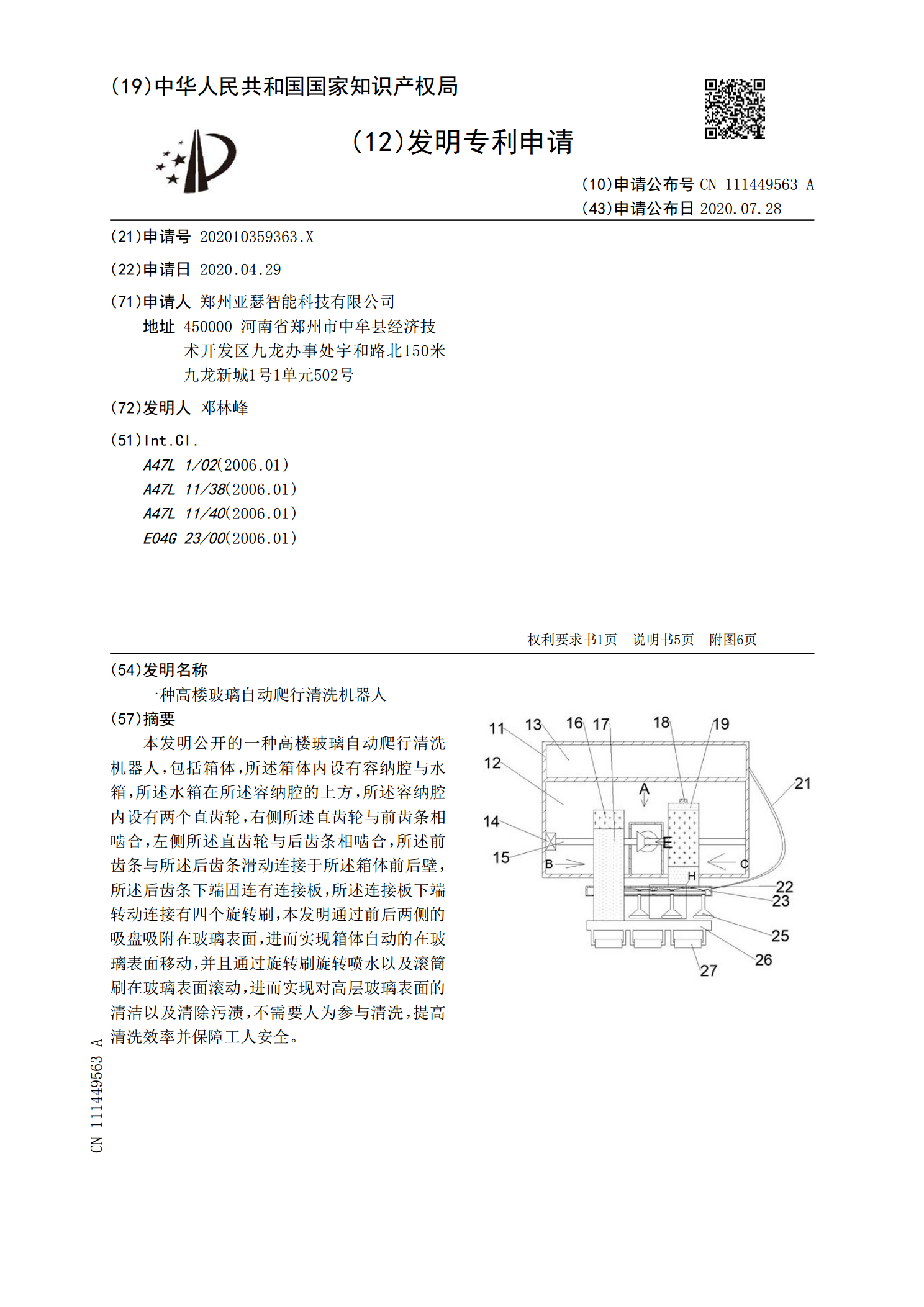
本发明公开的一种高楼玻璃自动爬行清洗机器人,包括箱体,所述箱体内设有容纳腔与水箱,所述水箱在所述容纳腔的上方,所述容纳腔内设有两个直齿轮,右侧所述直齿轮与前齿条相啮合,左侧所述直齿轮与后齿条相啮合,所述前齿条与所述后齿条滑动连接于所述箱体前后壁,所述后齿条下端固连有连接板,所述连接板下端转动连接有四个旋转刷,本发明通过前后两侧的吸盘吸附在玻璃表面,进而实现箱体自动的在玻璃表面移动,并且通过旋转刷旋转喷水以及滚筒刷在玻璃表面滚动,进而实现对高层玻璃表面的清洁以及清除污渍,不需要人为参与清洗,提高清洗效率并保
高楼玻璃幕墙自动清洗机器人及其方法.pdf
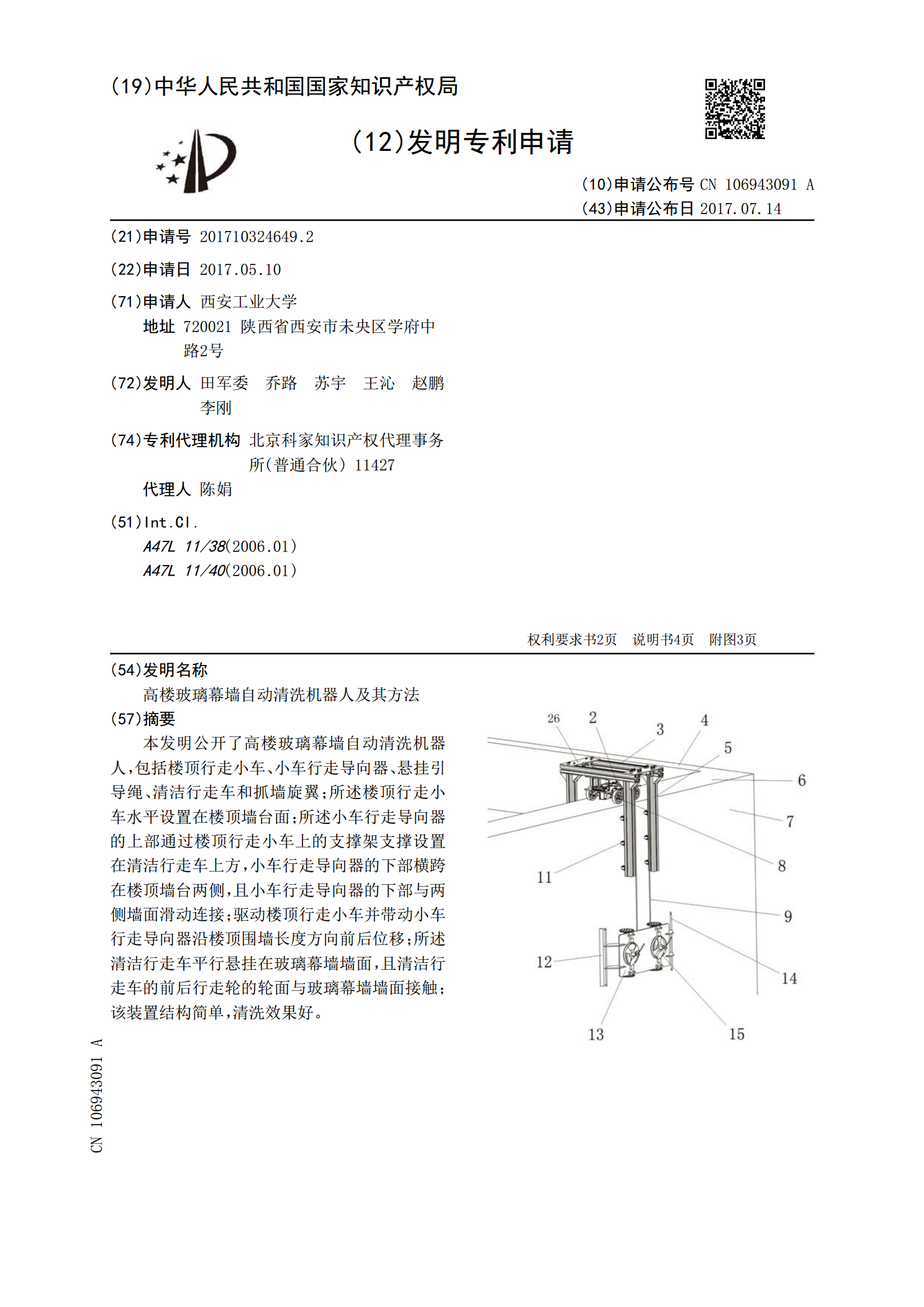
本发明公开了高楼玻璃幕墙自动清洗机器人,包括楼顶行走小车、小车行走导向器、悬挂引导绳、清洁行走车和抓墙旋翼;所述楼顶行走小车水平设置在楼顶墙台面;所述小车行走导向器的上部通过楼顶行走小车上的支撑架支撑设置在清洁行走车上方,小车行走导向器的下部横跨在楼顶墙台两侧,且小车行走导向器的下部与两侧墙面滑动连接;驱动楼顶行走小车并带动小车行走导向器沿楼顶围墙长度方向前后位移;所述清洁行走车平行悬挂在玻璃幕墙墙面,且清洁行走车的前后行走轮的轮面与玻璃幕墙墙面接触;该装置结构简单,清洗效果好。

一种高楼玻璃幕墙清洗机.pdf
本发明涉及自动清洗装置领域,尤其涉及一种玻璃幕墙清洗机。一种高楼玻璃幕墙清洗机,包括支撑架,支撑架上设有清洗机构、吸盘固定机构、驱动支撑架移动的移动机构,清洗机构包括圆形的清洗刷、驱动清洗刷的电动机,电动机的转动轴上设有主皮带轮,主皮带轮通过皮带连接传动皮带轮,传动皮带轮设置在旋转轴上,旋转轴连接清洗刷。本发明结构紧凑、质量较轻、成本低廉,实现了清洗机构清洗能力强,玻璃幕墙清洗更干净的优点。
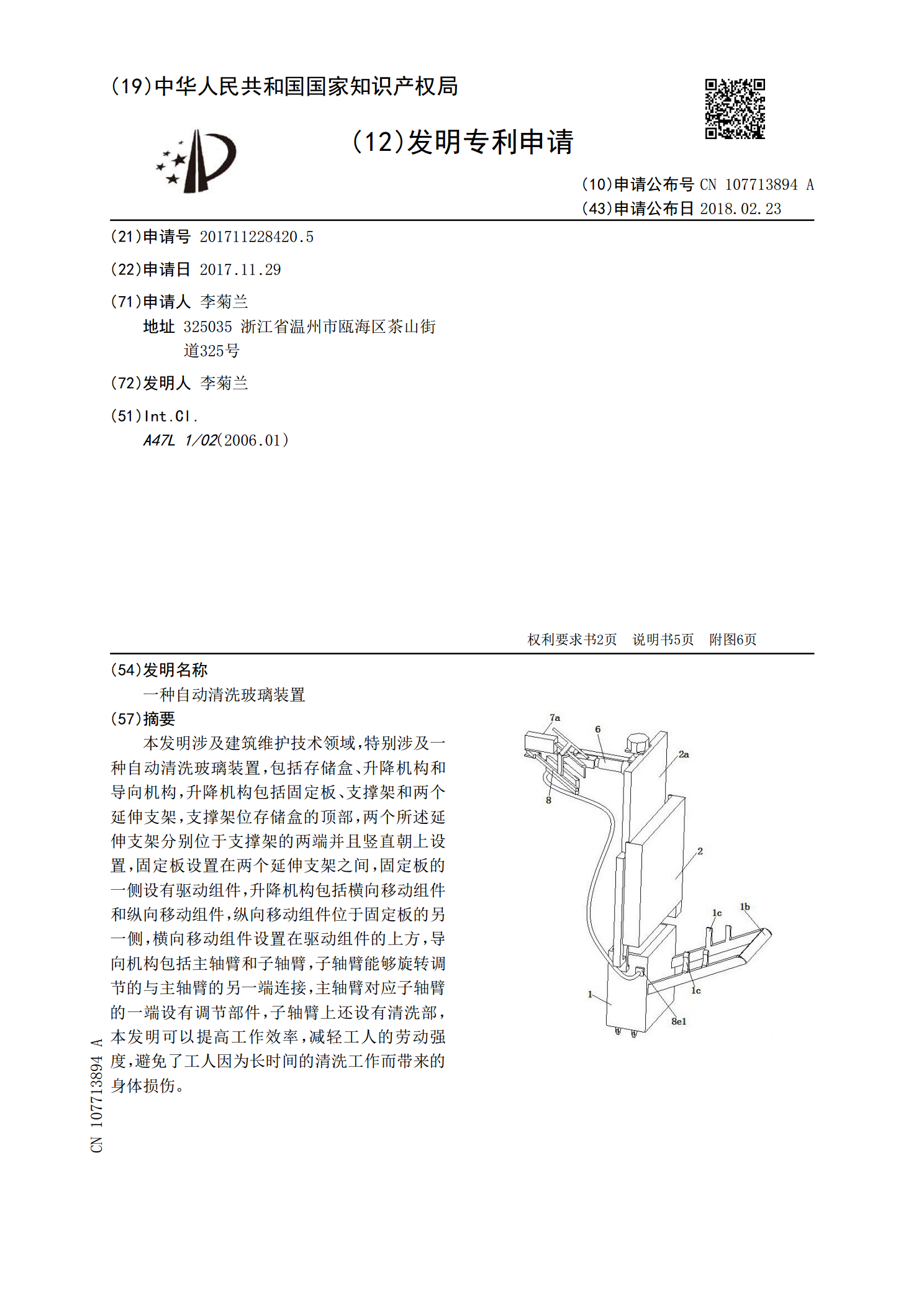
一种自动清洗玻璃装置.pdf
本发明涉及建筑维护技术领域,特别涉及一种自动清洗玻璃装置,包括存储盒、升降机构和导向机构,升降机构包括固定板、支撑架和两个延伸支架,支撑架位存储盒的顶部,两个所述延伸支架分别位于支撑架的两端并且竖直朝上设置,固定板设置在两个延伸支架之间,固定板的一侧设有驱动组件,升降机构包括横向移动组件和纵向移动组件,纵向移动组件位于固定板的另一侧,横向移动组件设置在驱动组件的上方,导向机构包括主轴臂和子轴臂,子轴臂能够旋转调节的与主轴臂的另一端连接,主轴臂对应子轴臂的一端设有调节部件,子轴臂上还设有清洗部,本发明可以提
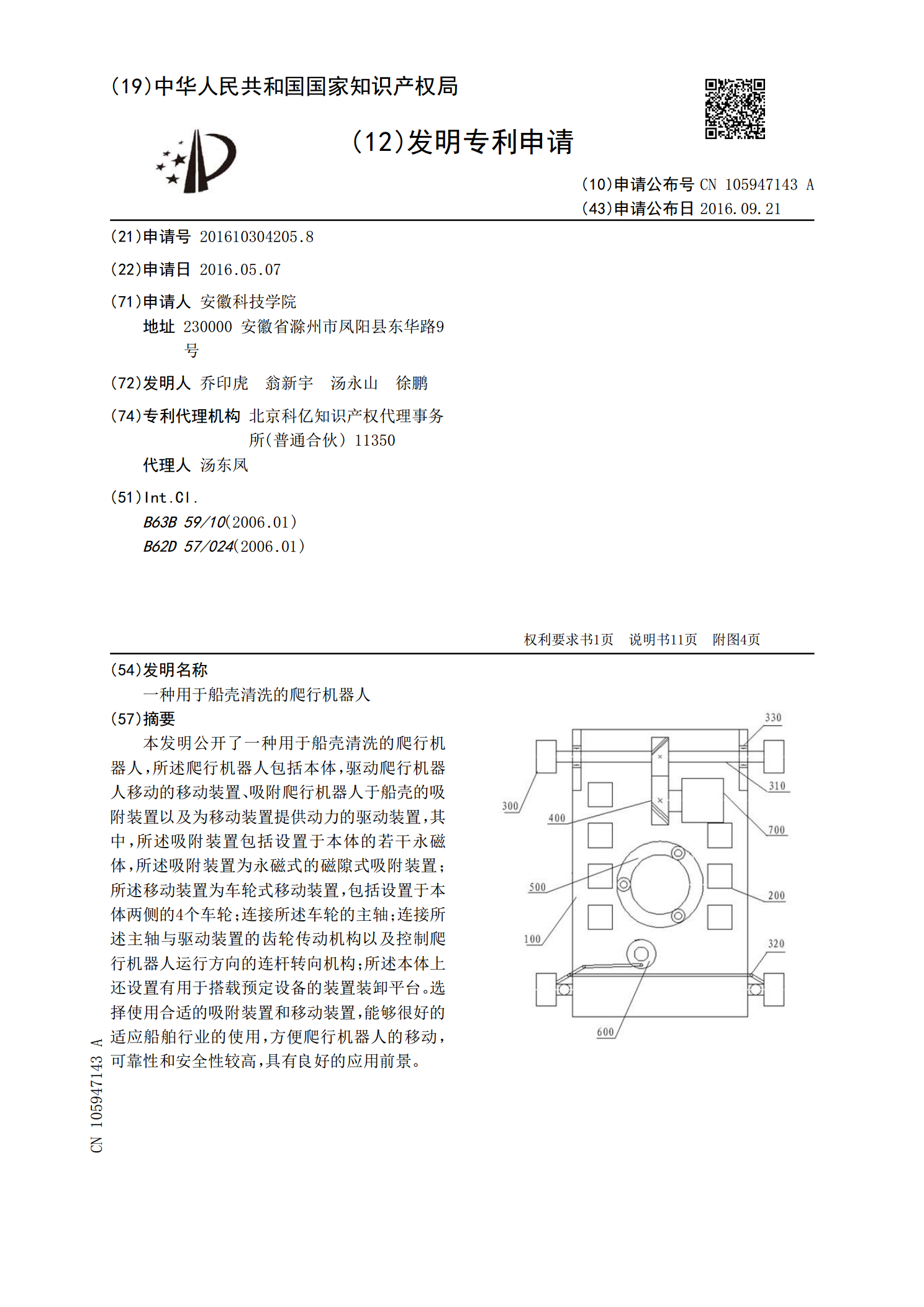
一种用于船壳清洗的爬行机器人.pdf
本发明公开了一种用于船壳清洗的爬行机器人,所述爬行机器人包括本体,驱动爬行机器人移动的移动装置、吸附爬行机器人于船壳的吸附装置以及为移动装置提供动力的驱动装置,其中,所述吸附装置包括设置于本体的若干永磁体,所述吸附装置为永磁式的磁隙式吸附装置;所述移动装置为车轮式移动装置,包括设置于本体两侧的4个车轮;连接所述车轮的主轴;连接所述主轴与驱动装置的齿轮传动机构以及控制爬行机器人运行方向的连杆转向机构;所述本体上还设置有用于搭载预定设备的装置装卸平台。选择使用合适的吸附装置和移动装置,能够很好的适应船舶行业的