
高楼玻璃幕墙自动清洗机器人及其方法.pdf

努力****南绿

1/10
2/10
3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
高楼玻璃幕墙自动清洗机器人及其方法.pdf
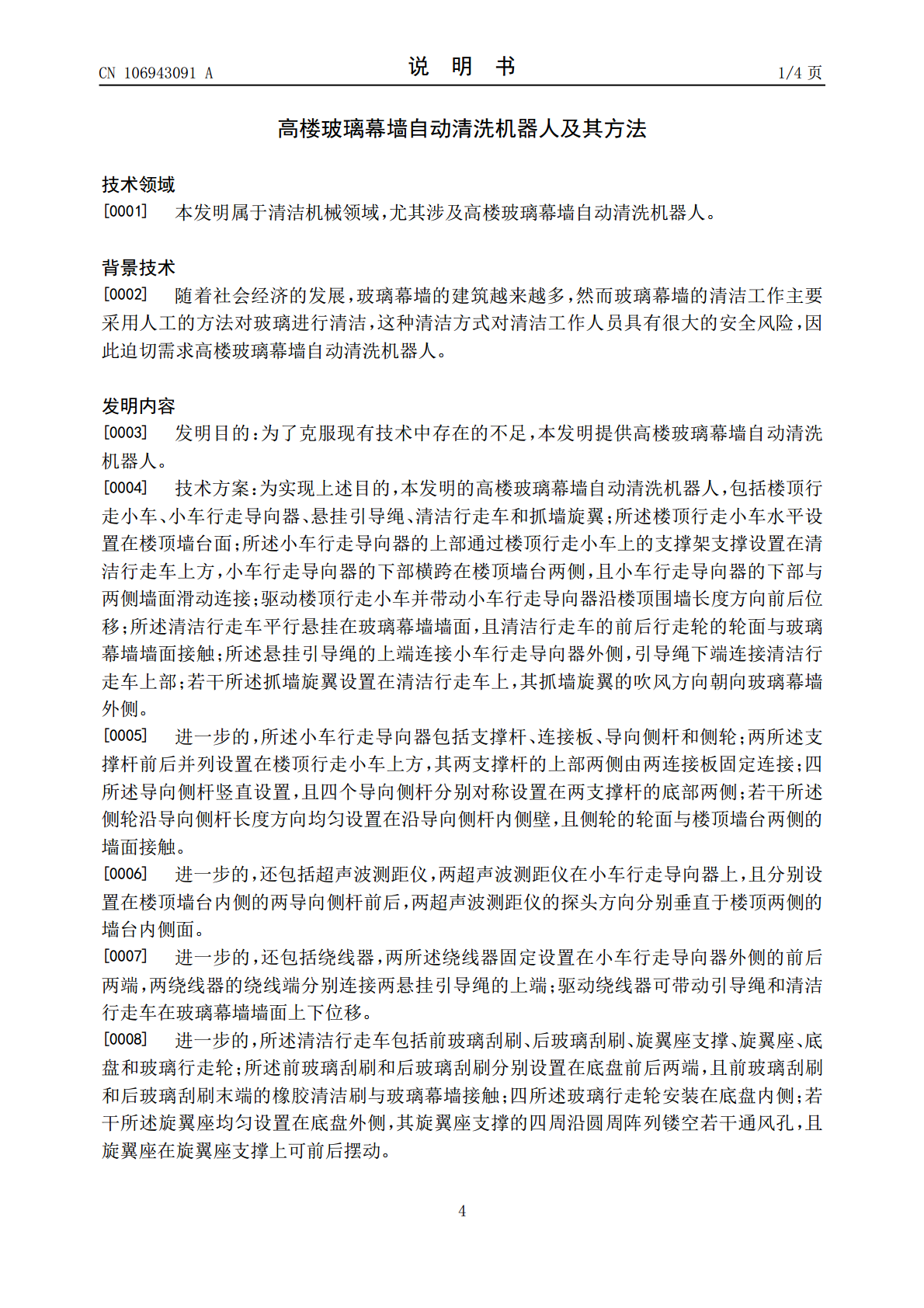
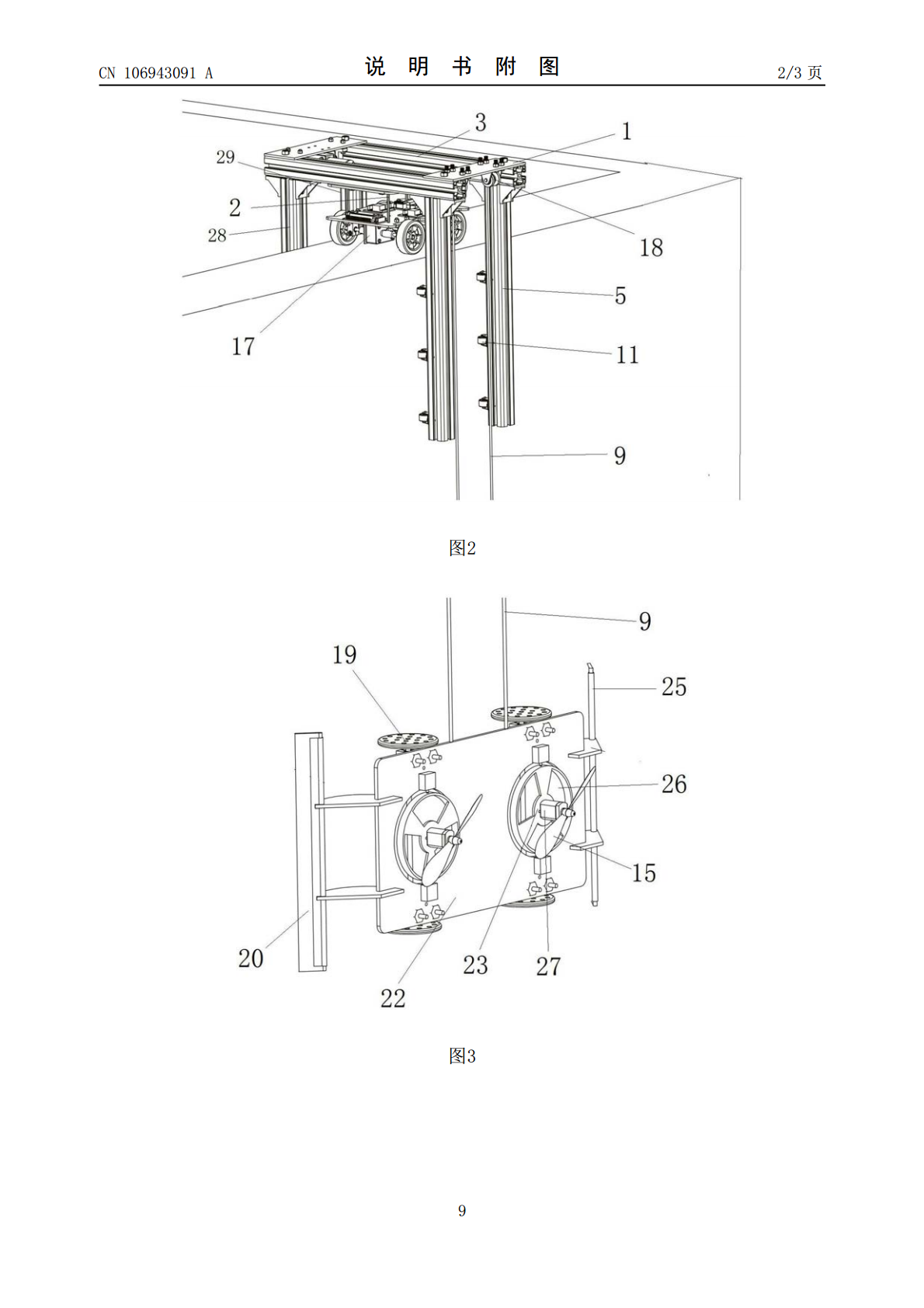
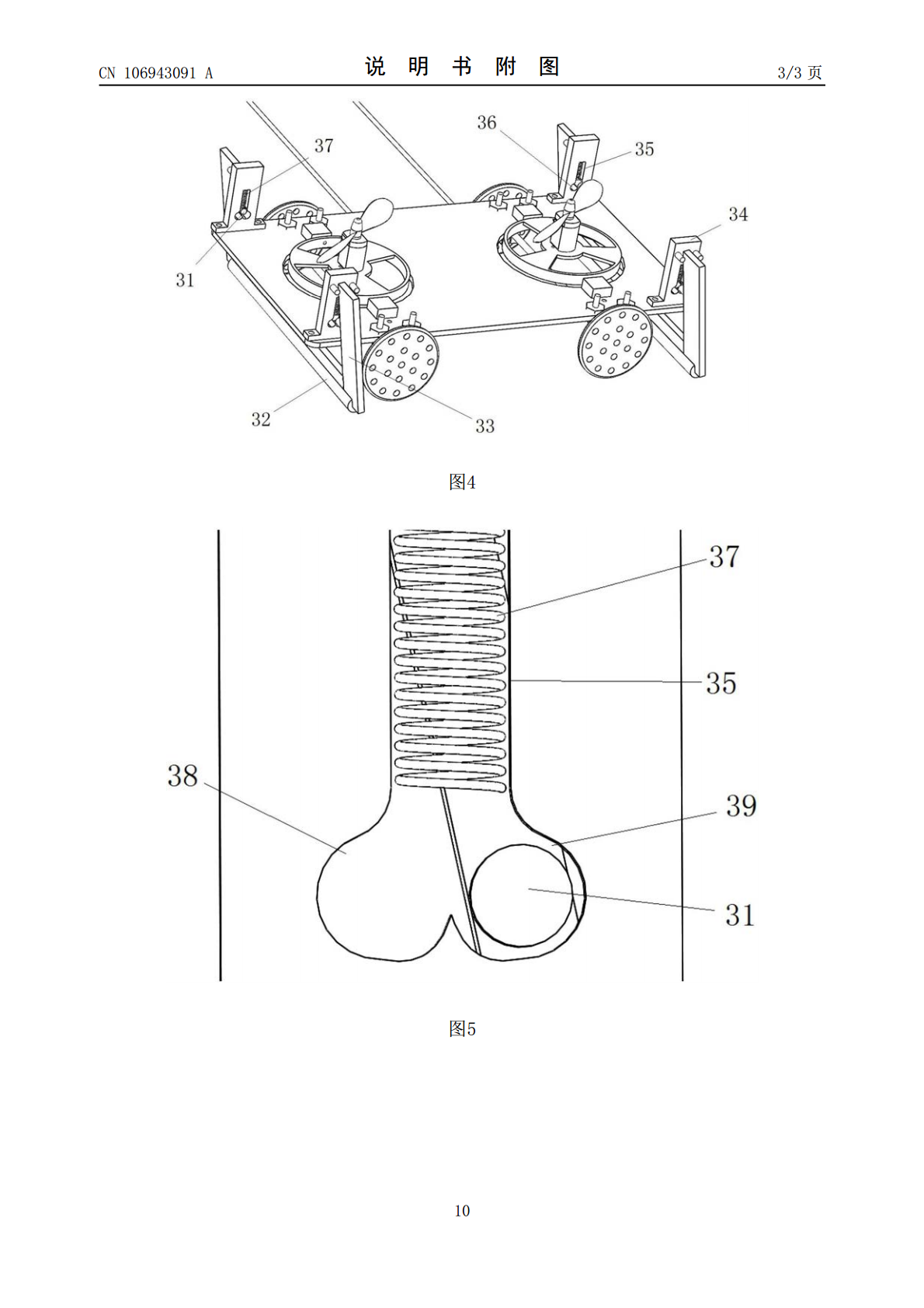
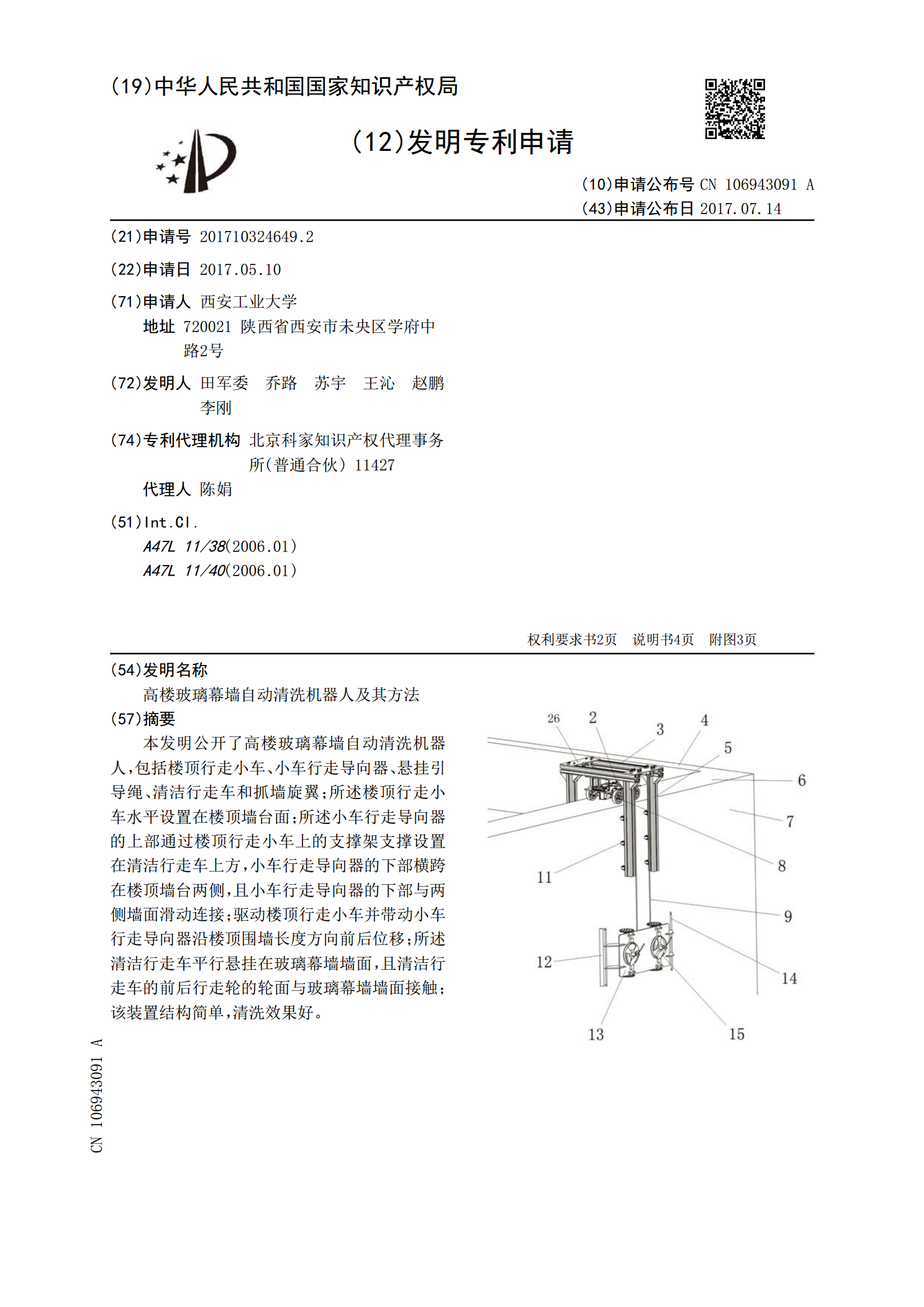
本发明公开了高楼玻璃幕墙自动清洗机器人,包括楼顶行走小车、小车行走导向器、悬挂引导绳、清洁行走车和抓墙旋翼;所述楼顶行走小车水平设置在楼顶墙台面;所述小车行走导向器的上部通过楼顶行走小车上的支撑架支撑设置在清洁行走车上方,小车行走导向器的下部横跨在楼顶墙台两侧,且小车行走导向器的下部与两侧墙面滑动连接;驱动楼顶行走小车并带动小车行走导向器沿楼顶围墙长度方向前后位移;所述清洁行走车平行悬挂在玻璃幕墙墙面,且清洁行走车的前后行走轮的轮面与玻璃幕墙墙面接触;该装置结构简单,清洗效果好。
高层玻璃幕墙自动清洗装置及其清洗方法.pdf
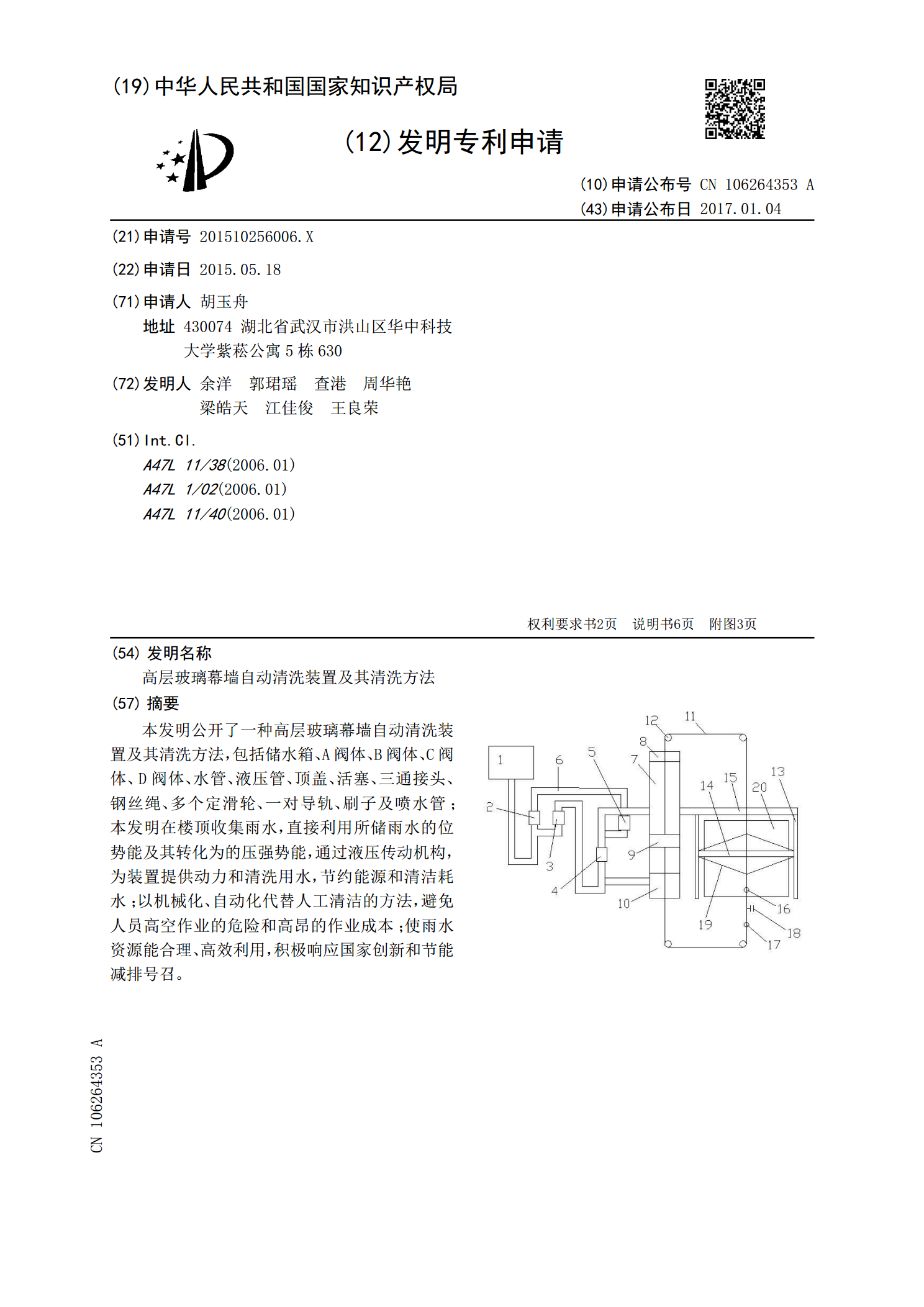
本发明公开了一种高层玻璃幕墙自动清洗装置及其清洗方法,包括储水箱、A阀体、B阀体、C阀体、D阀体、水管、液压管、顶盖、活塞、三通接头、钢丝绳、多个定滑轮、一对导轨、刷子及喷水管;本发明在楼顶收集雨水,直接利用所储雨水的位势能及其转化为的压强势能,通过液压传动机构,为装置提供动力和清洗用水,节约能源和清洁耗水;以机械化、自动化代替人工清洁的方法,避免人员高空作业的危险和高昂的作业成本;使雨水资源能合理、高效利用,积极响应国家创新和节能减排号召。

车轮自动清洗系统及其清洗方法.pdf
本发明公开了一种车轮自动清洗系统及其清洗方法,所述清洗系统包括:清洗槽(1)、水泵(6)和多个用于清洗车轮的高压水喷嘴(22)和洗车自动控制电路;所述清洗槽(1)和高压水喷嘴(22)与水循环系统连接,所述多个高压水喷嘴(22)设置在所述清洗槽(1)的左右两侧并分别沿多个方向对着清洗槽(1)内待清洗车辆两侧的车轮;洗车自动控制电路的车辆到位传感器(32)检测到车辆驶入或驶离的信号并通过单片机(31)控制执行机构(33)开启或关闭水泵(6)和高压水喷嘴(22)。本发明的车轮清洗系统自动操作,无需人工介入,清洗
一种高楼玻璃自动爬行清洗机器人.pdf
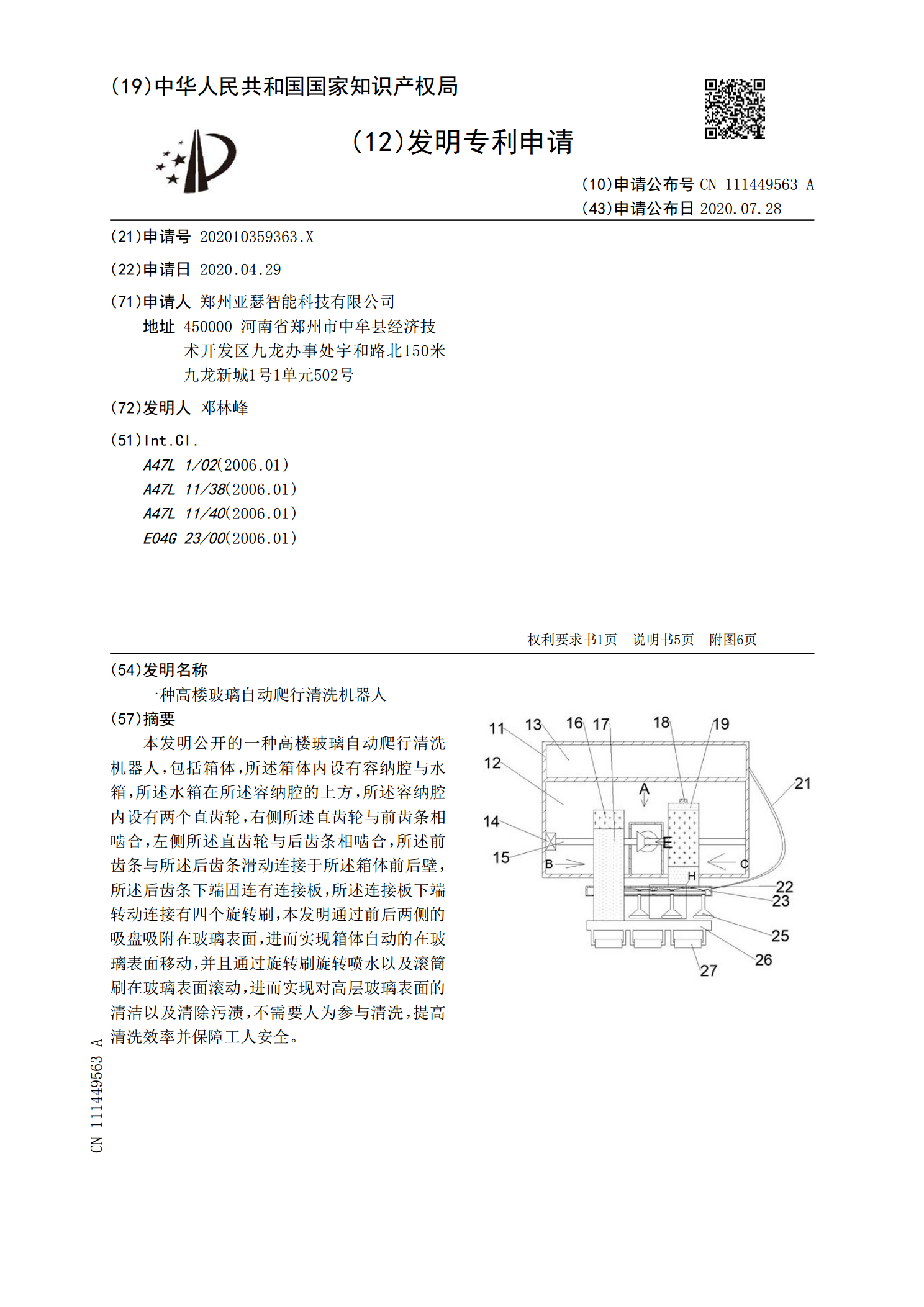
本发明公开的一种高楼玻璃自动爬行清洗机器人,包括箱体,所述箱体内设有容纳腔与水箱,所述水箱在所述容纳腔的上方,所述容纳腔内设有两个直齿轮,右侧所述直齿轮与前齿条相啮合,左侧所述直齿轮与后齿条相啮合,所述前齿条与所述后齿条滑动连接于所述箱体前后壁,所述后齿条下端固连有连接板,所述连接板下端转动连接有四个旋转刷,本发明通过前后两侧的吸盘吸附在玻璃表面,进而实现箱体自动的在玻璃表面移动,并且通过旋转刷旋转喷水以及滚筒刷在玻璃表面滚动,进而实现对高层玻璃表面的清洁以及清除污渍,不需要人为参与清洗,提高清洗效率并保

一种高楼玻璃幕墙清洗机.pdf
本发明涉及自动清洗装置领域,尤其涉及一种玻璃幕墙清洗机。一种高楼玻璃幕墙清洗机,包括支撑架,支撑架上设有清洗机构、吸盘固定机构、驱动支撑架移动的移动机构,清洗机构包括圆形的清洗刷、驱动清洗刷的电动机,电动机的转动轴上设有主皮带轮,主皮带轮通过皮带连接传动皮带轮,传动皮带轮设置在旋转轴上,旋转轴连接清洗刷。本发明结构紧凑、质量较轻、成本低廉,实现了清洗机构清洗能力强,玻璃幕墙清洗更干净的优点。