
机器人及其关节组件.pdf

雨巷****轶丽

1/9
2/9
3/9
4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
机器人及其关节组件.pdf
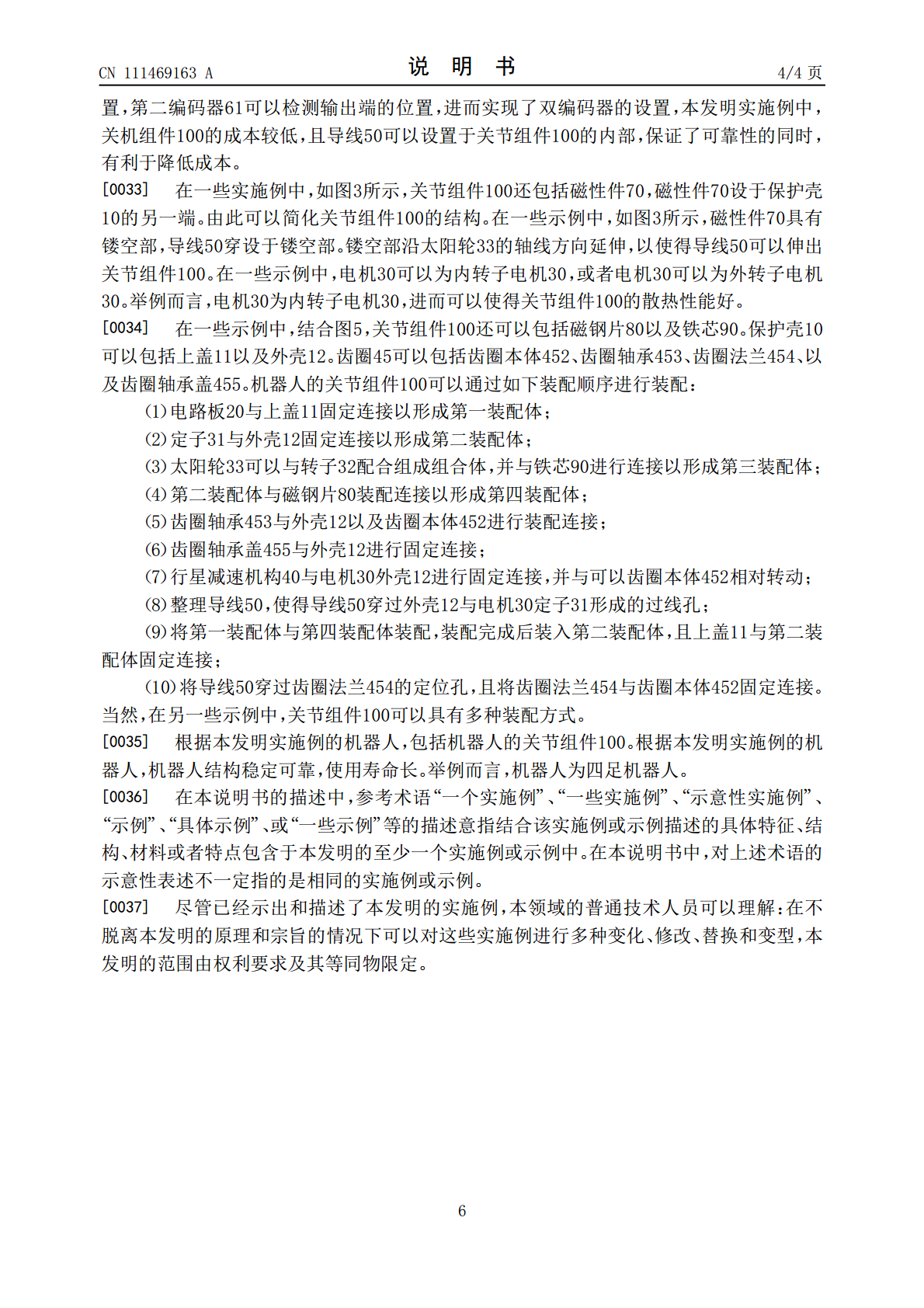
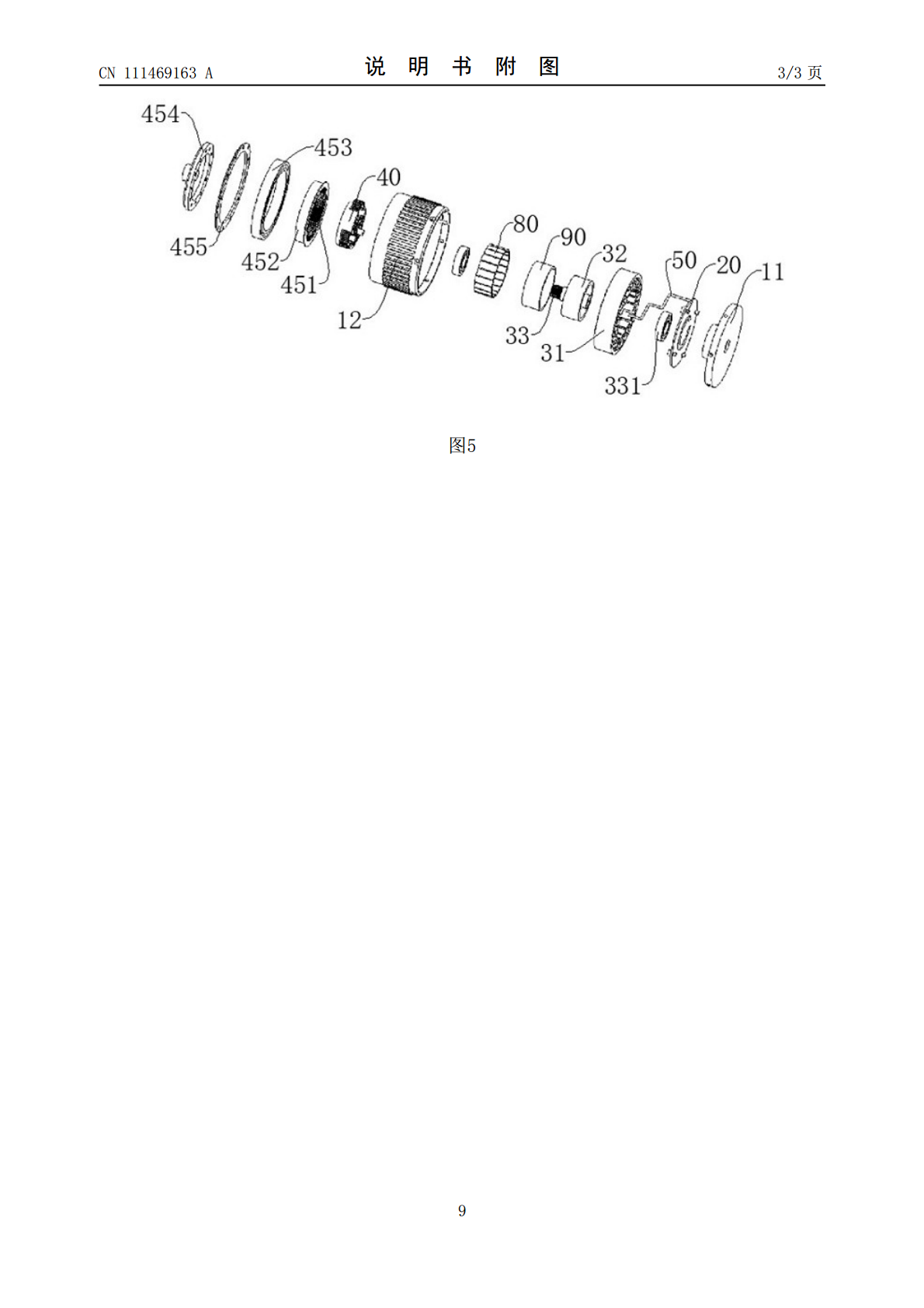
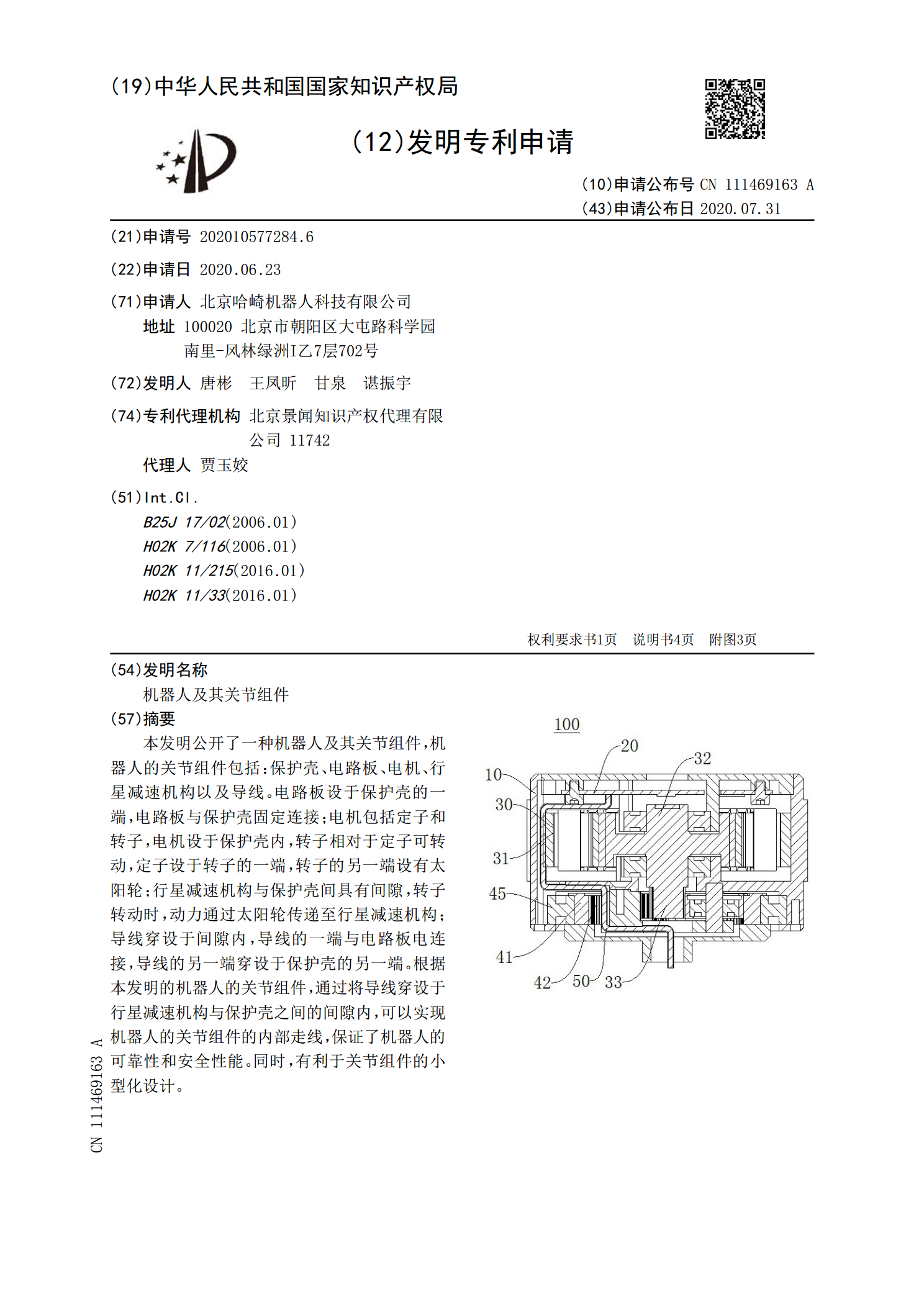
本发明公开了一种机器人及其关节组件,机器人的关节组件包括:保护壳、电路板、电机、行星减速机构以及导线。电路板设于保护壳的一端,电路板与保护壳固定连接;电机包括定子和转子,电机设于保护壳内,转子相对于定子可转动,定子设于转子的一端,转子的另一端设有太阳轮;行星减速机构与保护壳间具有间隙,转子转动时,动力通过太阳轮传递至行星减速机构;导线穿设于间隙内,导线的一端与电路板电连接,导线的另一端穿设于保护壳的另一端。根据本发明的机器人的关节组件,通过将导线穿设于行星减速机构与保护壳之间的间隙内,可以实现机器人的关节
用于机器人关节的齿轮组件.pdf
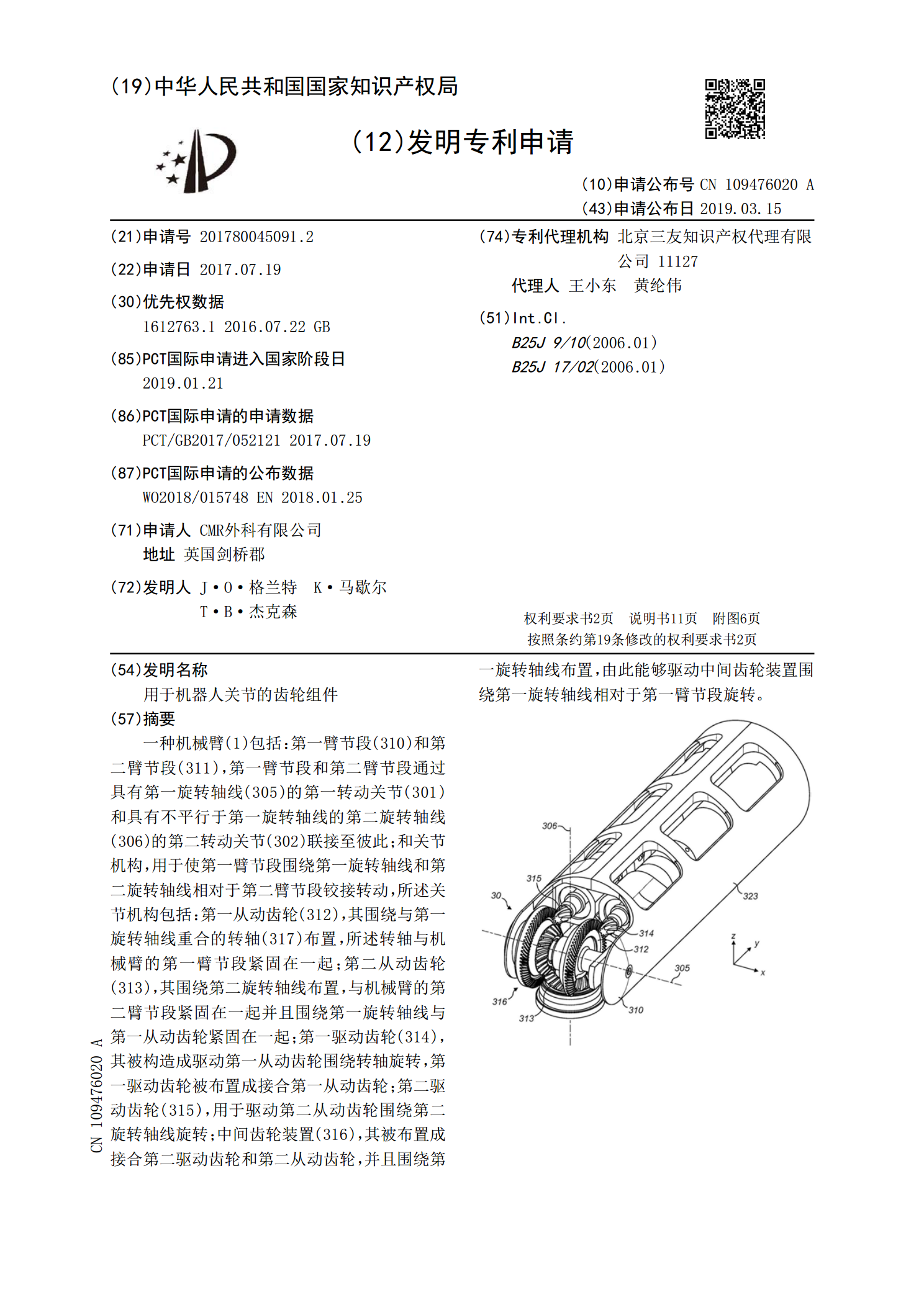
一种机械臂(1)包括:第一臂节段(310)和第二臂节段(311),第一臂节段和第二臂节段通过具有第一旋转轴线(305)的第一转动关节(301)和具有不平行于第一旋转轴线的第二旋转轴线(306)的第二转动关节(302)联接至彼此;和关节机构,用于使第一臂节段围绕第一旋转轴线和第二旋转轴线相对于第二臂节段铰接转动,所述关节机构包括:第一从动齿轮(312),其围绕与第一旋转轴线重合的转轴(317)布置,所述转轴与机械臂的第一臂节段紧固在一起;第二从动齿轮(313),其围绕第二旋转轴线布置,与机械臂的第二臂节段紧
关节臂组件及弧焊机器人.pdf
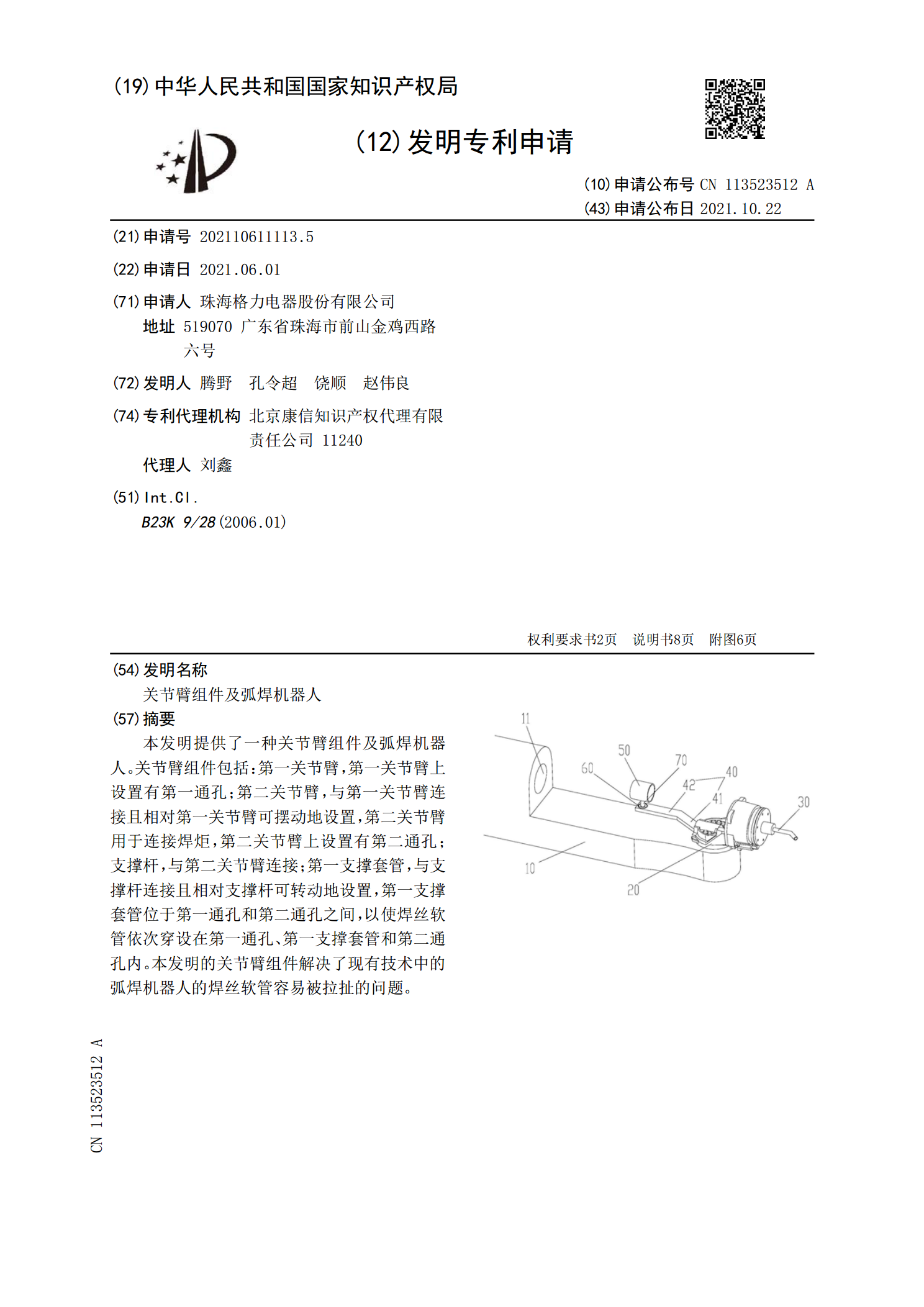
本发明提供了一种关节臂组件及弧焊机器人。关节臂组件包括:第一关节臂,第一关节臂上设置有第一通孔;第二关节臂,与第一关节臂连接且相对第一关节臂可摆动地设置,第二关节臂用于连接焊炬,第二关节臂上设置有第二通孔;支撑杆,与第二关节臂连接;第一支撑套管,与支撑杆连接且相对支撑杆可转动地设置,第一支撑套管位于第一通孔和第二通孔之间,以使焊丝软管依次穿设在第一通孔、第一支撑套管和第二通孔内。本发明的关节臂组件解决了现有技术中的弧焊机器人的焊丝软管容易被拉扯的问题。
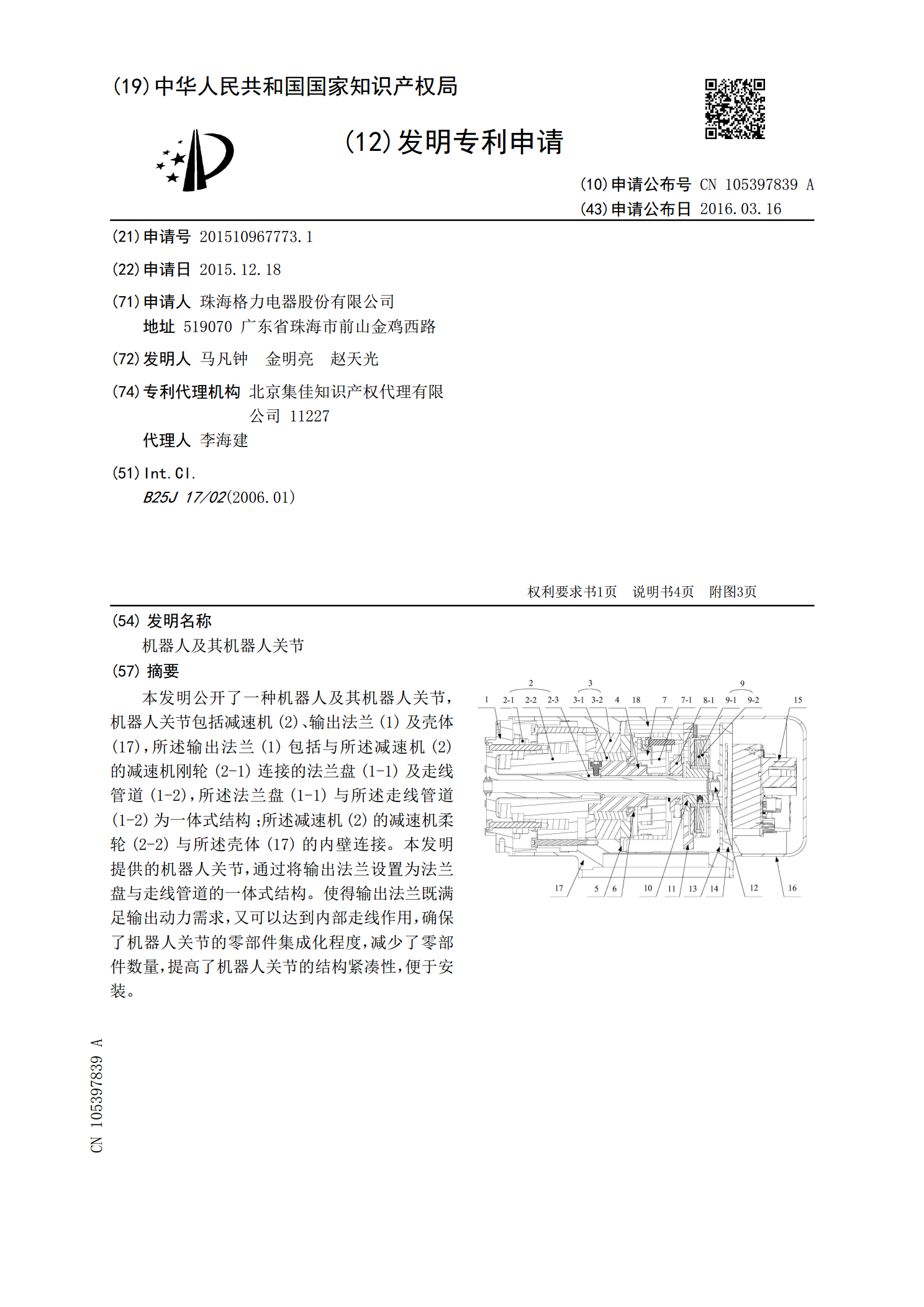
机器人及其机器人关节.pdf
本发明公开了一种机器人及其机器人关节,机器人关节包括减速机(2)、输出法兰(1)及壳体(17),所述输出法兰(1)包括与所述减速机(2)的减速机刚轮(2-1)连接的法兰盘(1-1)及走线管道(1-2),所述法兰盘(1-1)与所述走线管道(1-2)为一体式结构;所述减速机(2)的减速机柔轮(2-2)与所述壳体(17)的内壁连接。本发明提供的机器人关节,通过将输出法兰设置为法兰盘与走线管道的一体式结构。使得输出法兰既满足输出动力需求,又可以达到内部走线作用,确保了机器人关节的零部件集成化程度,减少了零部件数量
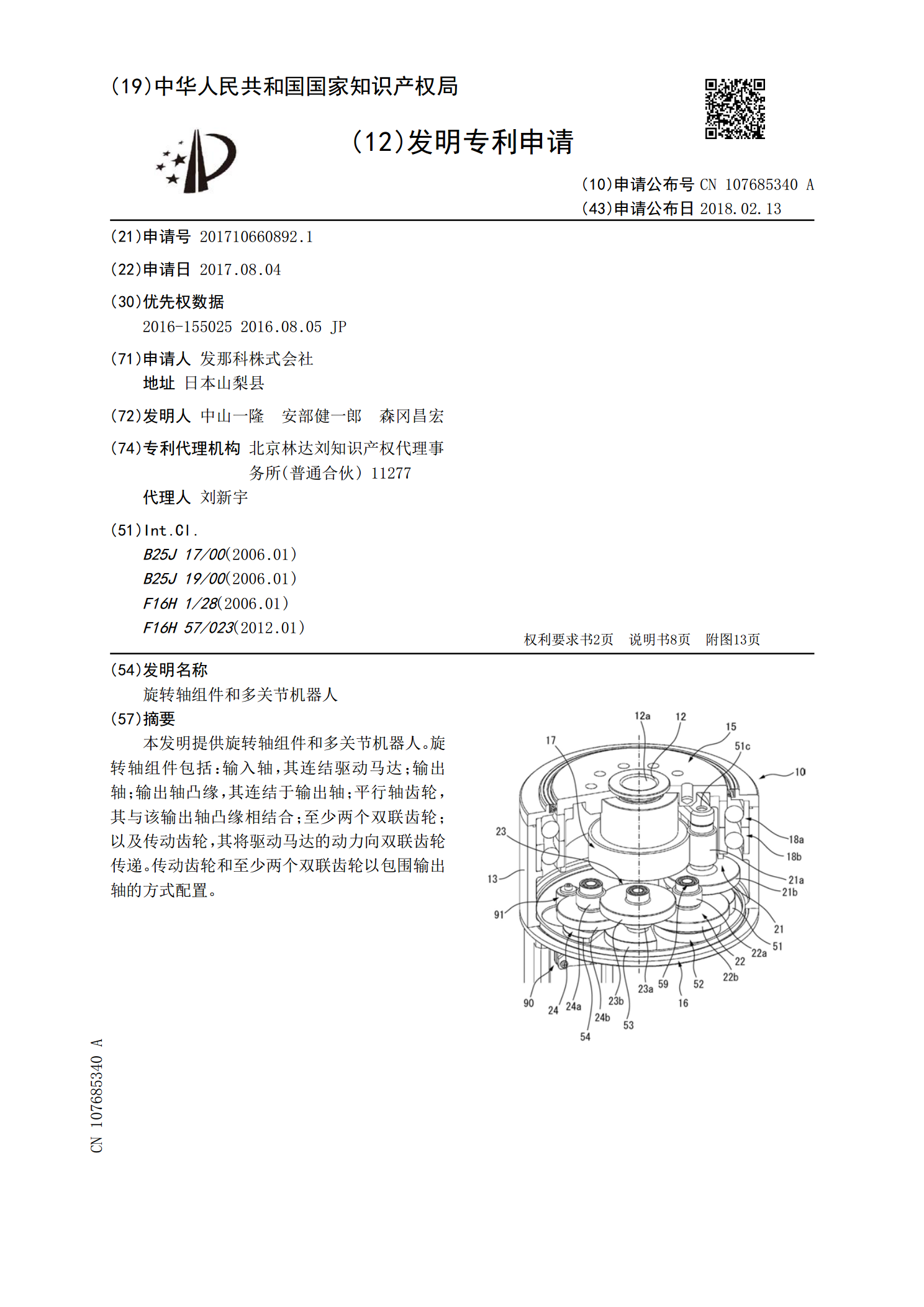
旋转轴组件和多关节机器人.pdf
本发明提供旋转轴组件和多关节机器人。旋转轴组件包括:输入轴,其连结驱动马达;输出轴;输出轴凸缘,其连结于输出轴;平行轴齿轮,其与该输出轴凸缘相结合;至少两个双联齿轮;以及传动齿轮,其将驱动马达的动力向双联齿轮传递。传动齿轮和至少两个双联齿轮以包围输出轴的方式配置。