
机器人及其机器人关节.pdf

a是****澜吖


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
机器人及其机器人关节.pdf
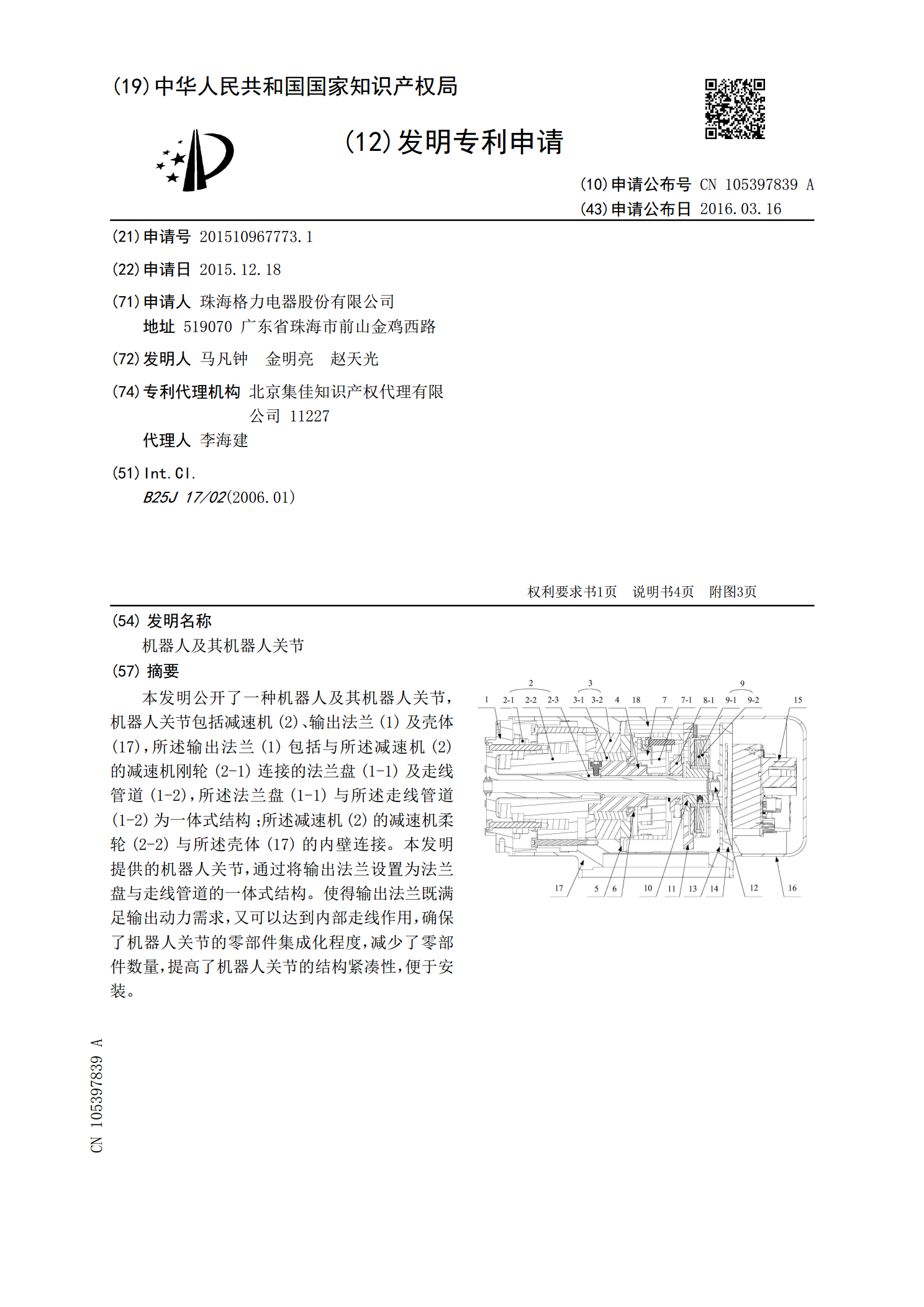
本发明公开了一种机器人及其机器人关节,机器人关节包括减速机(2)、输出法兰(1)及壳体(17),所述输出法兰(1)包括与所述减速机(2)的减速机刚轮(2-1)连接的法兰盘(1-1)及走线管道(1-2),所述法兰盘(1-1)与所述走线管道(1-2)为一体式结构;所述减速机(2)的减速机柔轮(2-2)与所述壳体(17)的内壁连接。本发明提供的机器人关节,通过将输出法兰设置为法兰盘与走线管道的一体式结构。使得输出法兰既满足输出动力需求,又可以达到内部走线作用,确保了机器人关节的零部件集成化程度,减少了零部件数量
机器人及其关节组件.pdf
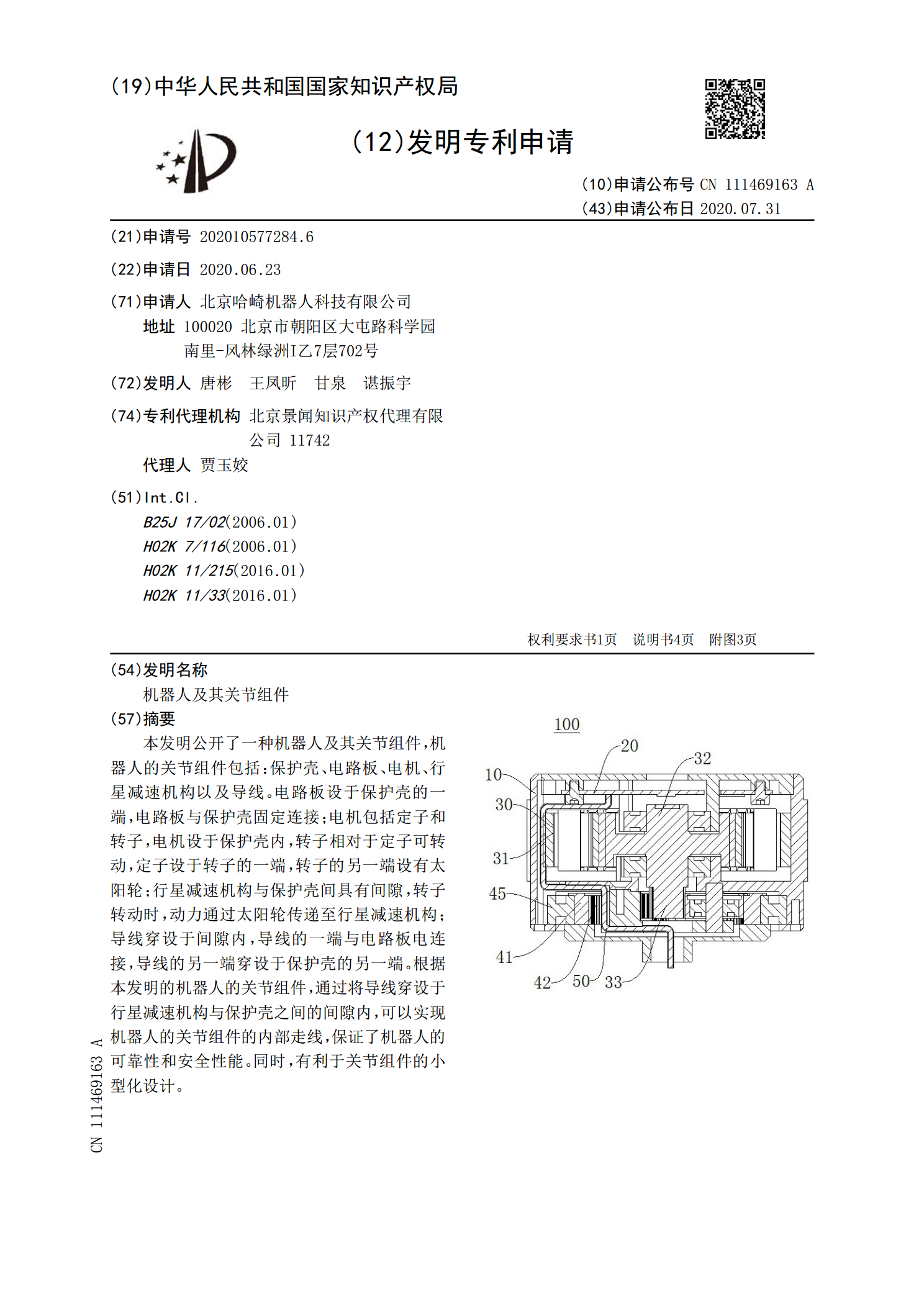
本发明公开了一种机器人及其关节组件,机器人的关节组件包括:保护壳、电路板、电机、行星减速机构以及导线。电路板设于保护壳的一端,电路板与保护壳固定连接;电机包括定子和转子,电机设于保护壳内,转子相对于定子可转动,定子设于转子的一端,转子的另一端设有太阳轮;行星减速机构与保护壳间具有间隙,转子转动时,动力通过太阳轮传递至行星减速机构;导线穿设于间隙内,导线的一端与电路板电连接,导线的另一端穿设于保护壳的另一端。根据本发明的机器人的关节组件,通过将导线穿设于行星减速机构与保护壳之间的间隙内,可以实现机器人的关节

机器人及其关节驱动装置.pdf
本发明公开了一种机器人及其关节驱动装置,机器人关节的驱动装置包括:关节驱动轮和联动齿轮;与所述关节驱动轮和联动齿轮均啮合的同步齿带,所述同步齿带的两端之间依次串接有第一弹性件和第二弹性件;调节部件,其能够调节所述第一弹性件和/或第二弹性件的长度。由于通过调节部件改变第一弹性件和/或第二弹性件的长度,进而改变了第一弹性件和第二弹性件共同形成的弹性组件的刚度,实现了机器人关机刚度的改变,使关节的驱动装置的刚度范围大大增加,能够适用于多种环境,大大提高了柔性关节的通用性。

机器人关节及机器人.pdf
本发明提供一种机器人关节及机器人,包括壳体以及盖体,壳体具有开口,盖体通过连接结构盖合在壳体上,并完全遮挡住开口,连接结构的第一连接结构包括具有配合孔的安装板,第二连接结构包括在受挤压力时处于压缩状态、在自身弹力作用下恢复至正常状态的弹性插接件,弹性插接件具有在正常状态下能卡掣在配合孔内的插接头部,且盖体盖合至壳体时,弹性插接件从压缩状态切换至正常状态;盖体具有朝向第二容置腔的内壁面,弹性插接件设置在内壁面上,安装板设置在第二容置腔内;或安装板设置在内壁面上,弹性插接件设置在第二容置腔内。本发明机器人关节
机器人关节及机器人.pdf
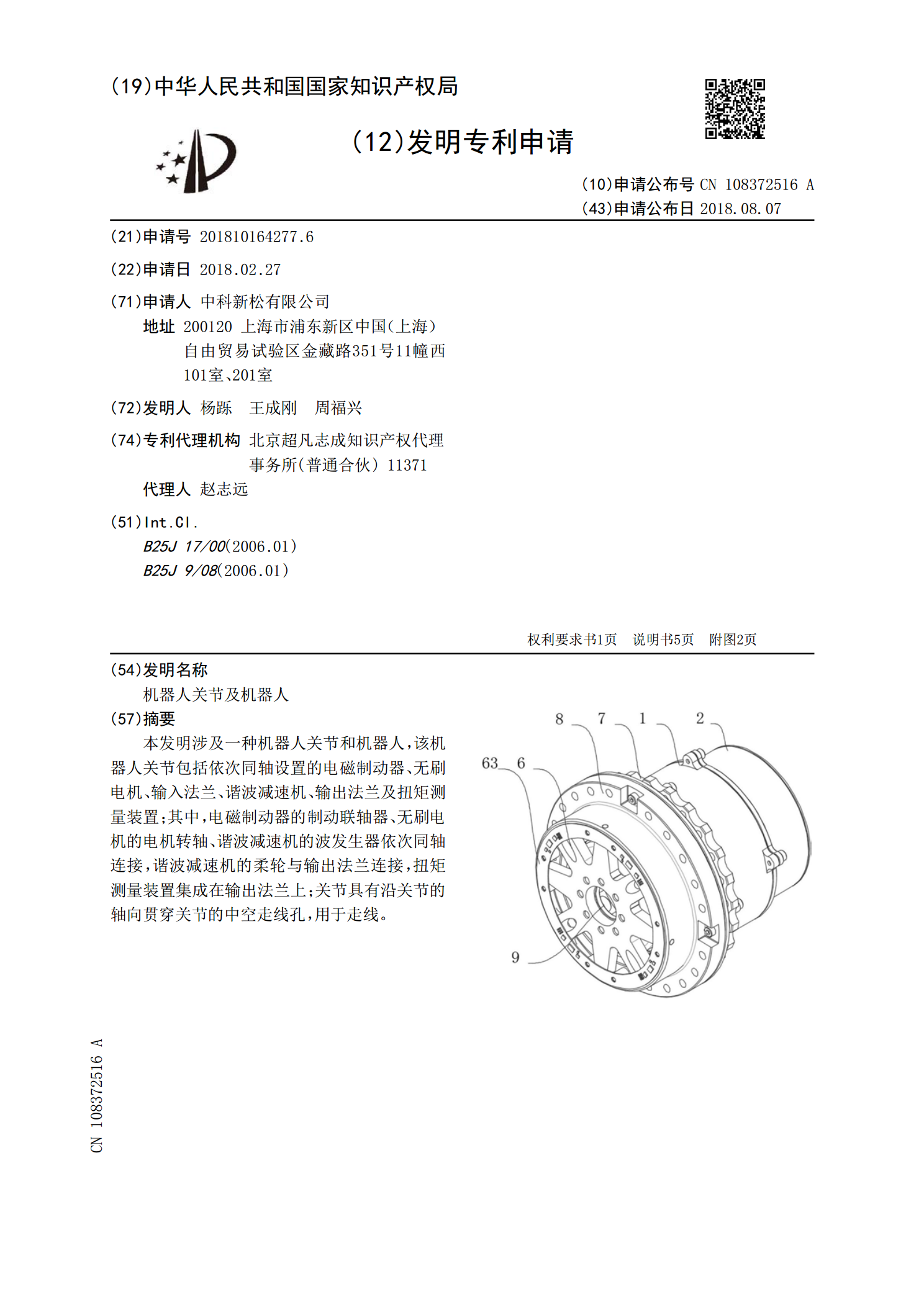
本发明涉及一种机器人关节和机器人,该机器人关节包括依次同轴设置的电磁制动器、无刷电机、输入法兰、谐波减速机、输出法兰及扭矩测量装置;其中,电磁制动器的制动联轴器、无刷电机的电机转轴、谐波减速机的波发生器依次同轴连接,谐波减速机的柔轮与输出法兰连接,扭矩测量装置集成在输出法兰上;关节具有沿关节的轴向贯穿关节的中空走线孔,用于走线。