
旋转轴组件和多关节机器人.pdf

猫巷****婉慧

1/10

2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共24页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
旋转轴组件和多关节机器人.pdf
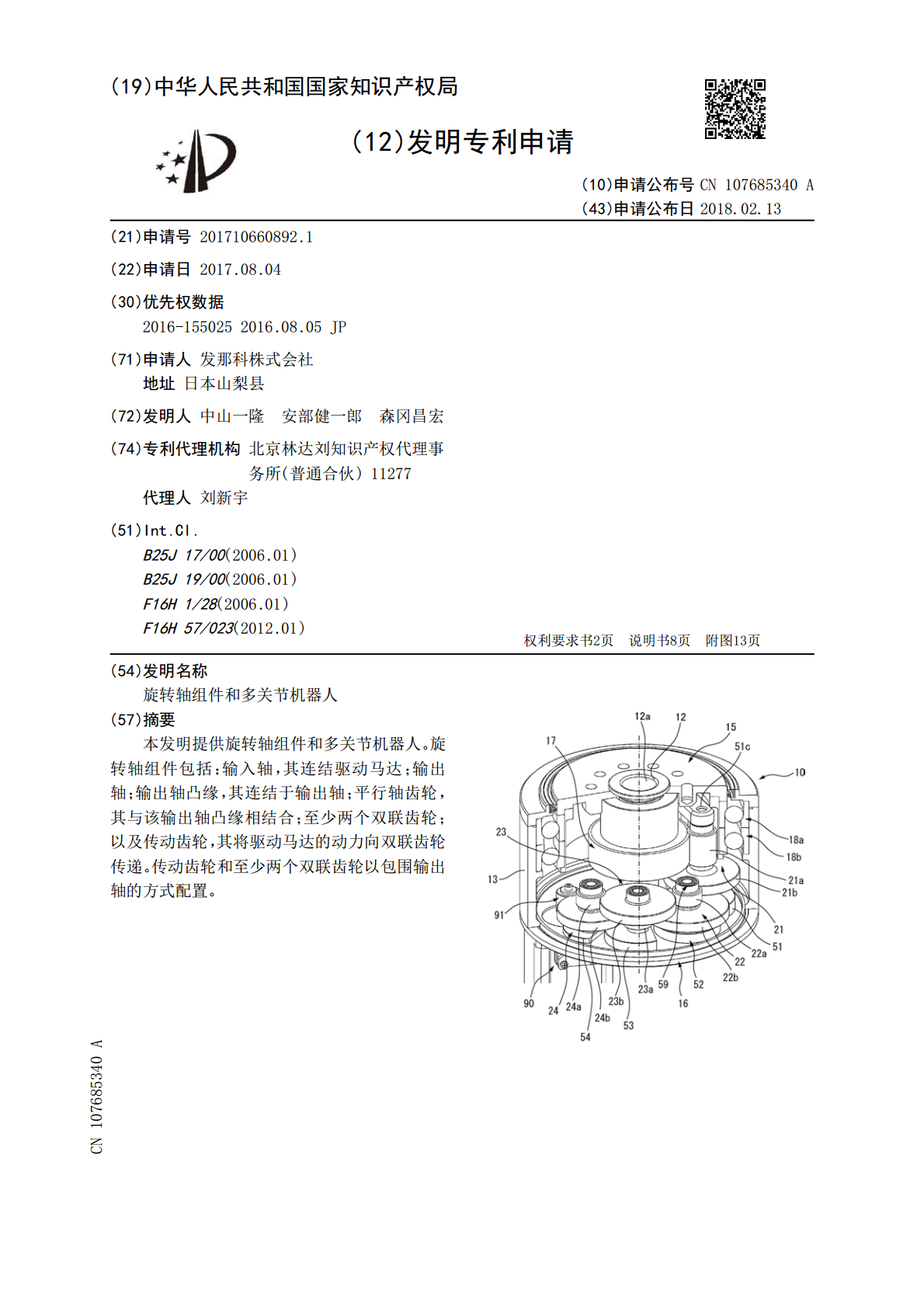
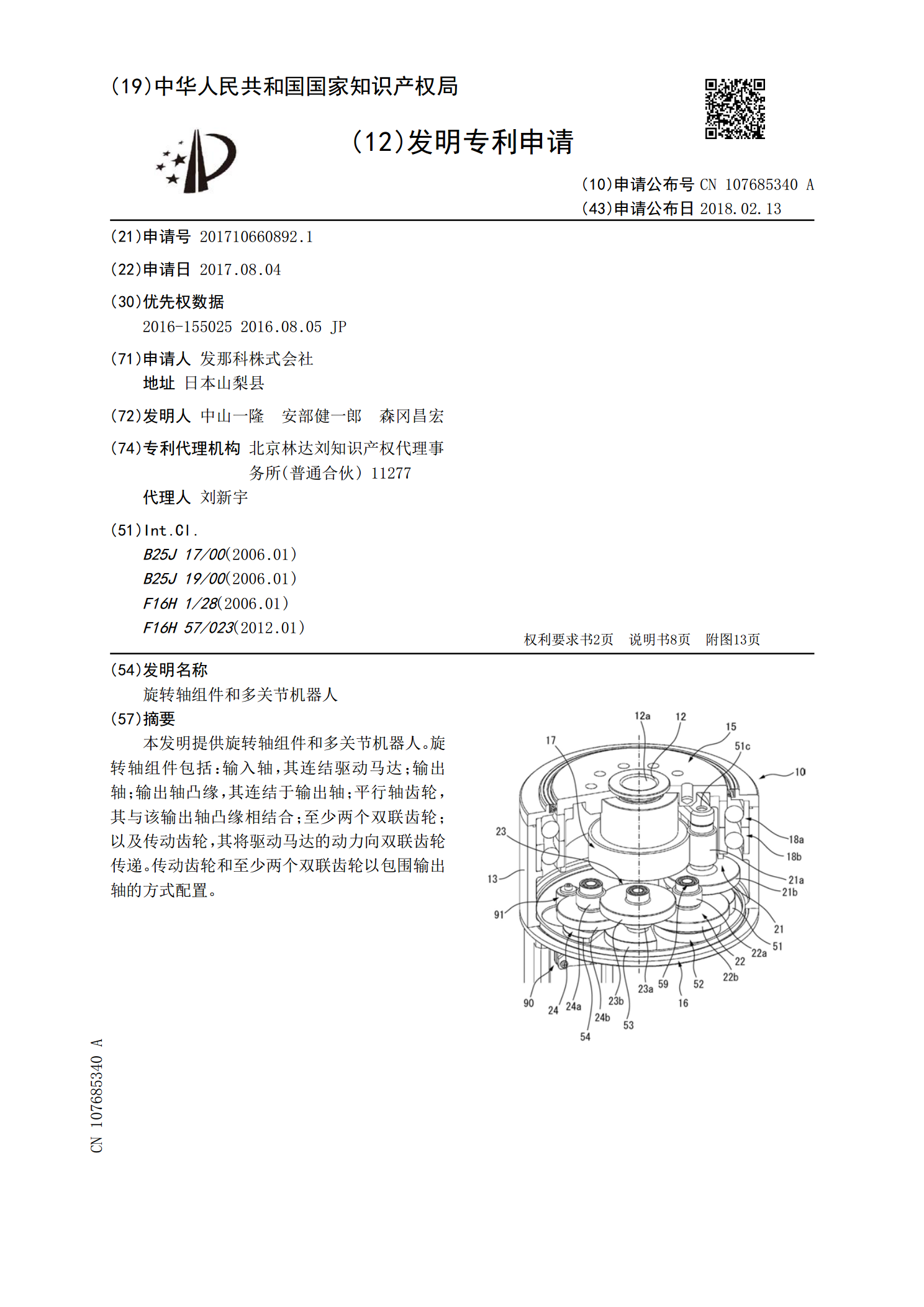
本发明提供旋转轴组件和多关节机器人。旋转轴组件包括:输入轴,其连结驱动马达;输出轴;输出轴凸缘,其连结于输出轴;平行轴齿轮,其与该输出轴凸缘相结合;至少两个双联齿轮;以及传动齿轮,其将驱动马达的动力向双联齿轮传递。传动齿轮和至少两个双联齿轮以包围输出轴的方式配置。
机器人及其关节组件.pdf
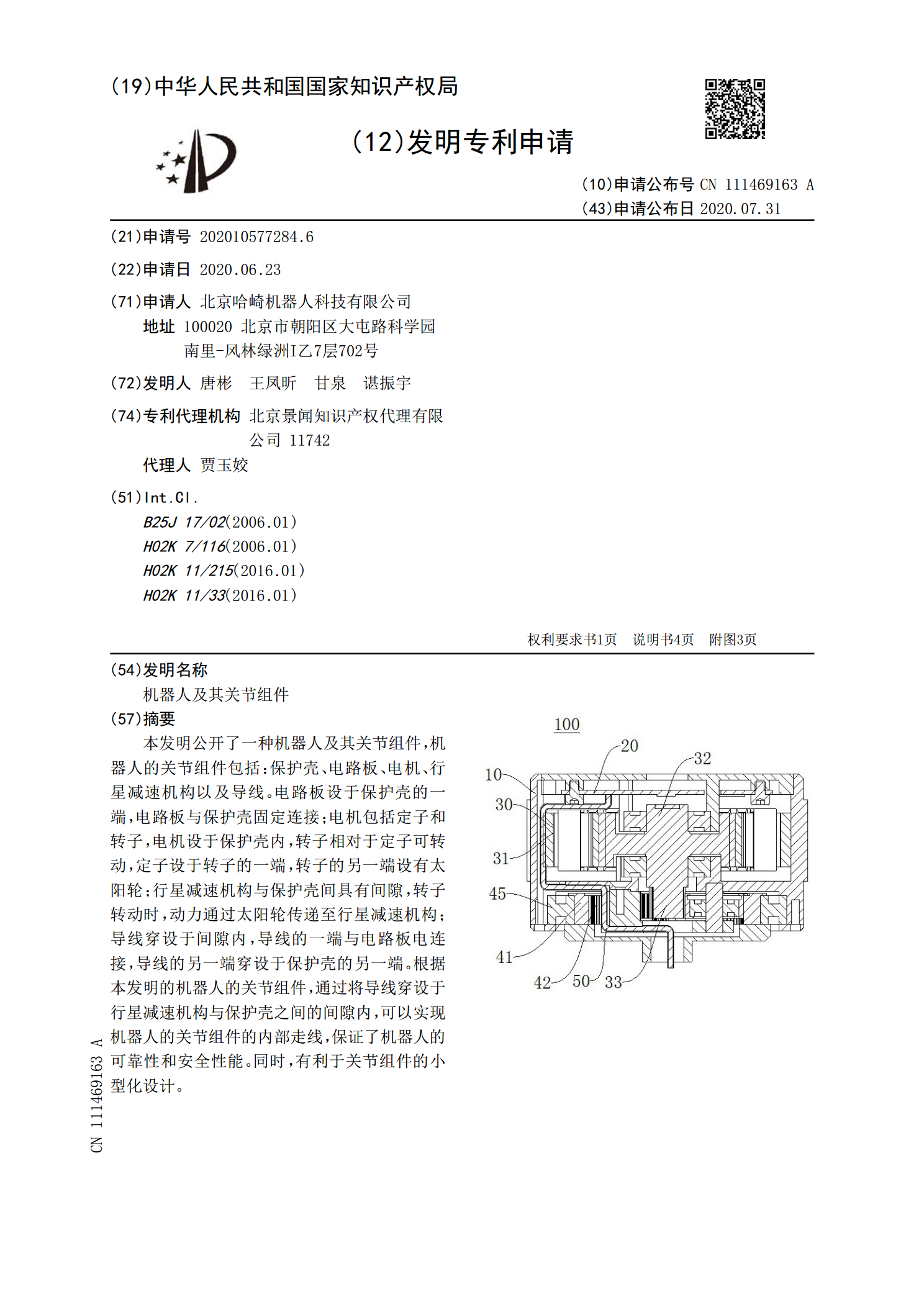
本发明公开了一种机器人及其关节组件,机器人的关节组件包括:保护壳、电路板、电机、行星减速机构以及导线。电路板设于保护壳的一端,电路板与保护壳固定连接;电机包括定子和转子,电机设于保护壳内,转子相对于定子可转动,定子设于转子的一端,转子的另一端设有太阳轮;行星减速机构与保护壳间具有间隙,转子转动时,动力通过太阳轮传递至行星减速机构;导线穿设于间隙内,导线的一端与电路板电连接,导线的另一端穿设于保护壳的另一端。根据本发明的机器人的关节组件,通过将导线穿设于行星减速机构与保护壳之间的间隙内,可以实现机器人的关节
用于机器人关节的齿轮组件.pdf
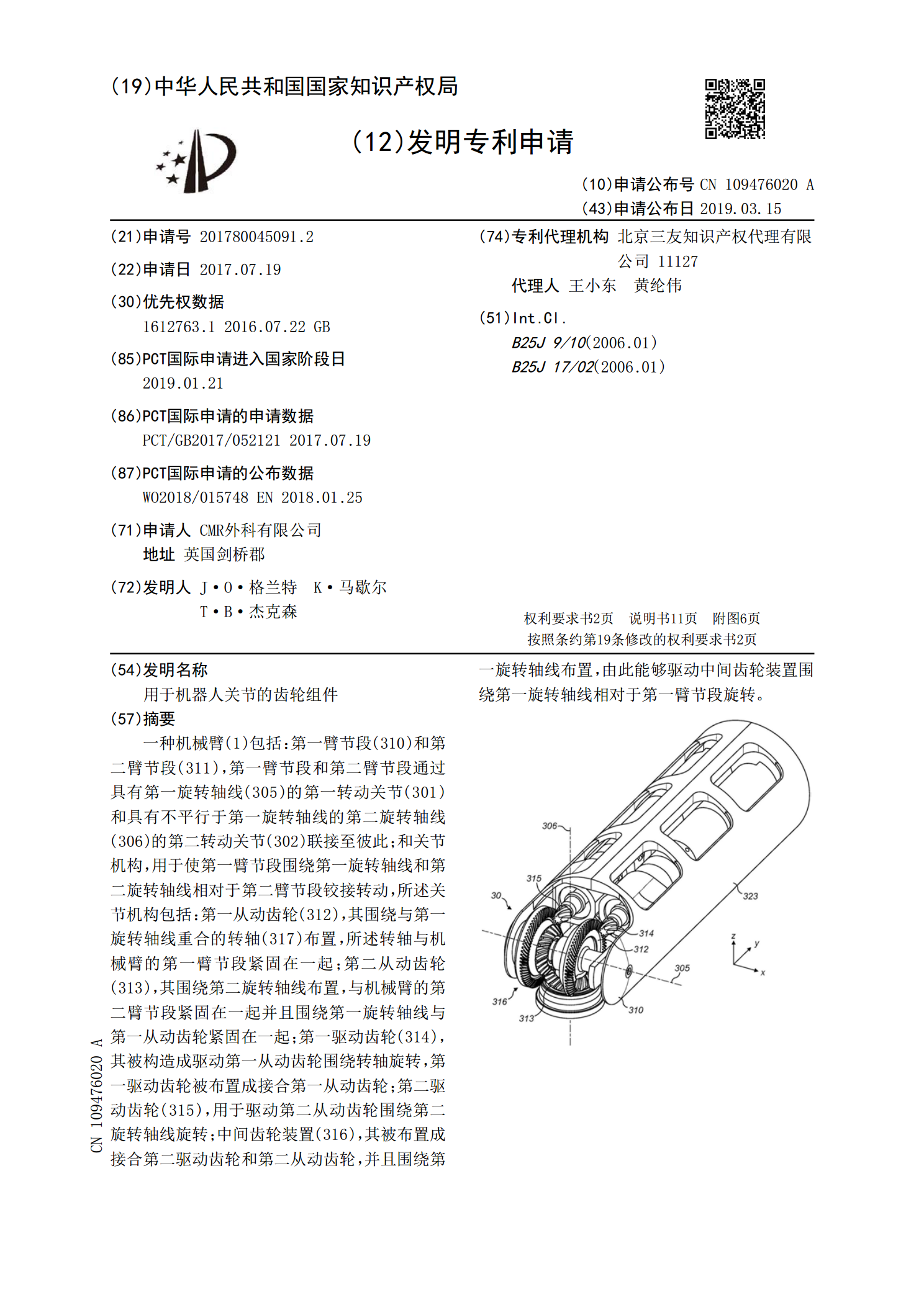
一种机械臂(1)包括:第一臂节段(310)和第二臂节段(311),第一臂节段和第二臂节段通过具有第一旋转轴线(305)的第一转动关节(301)和具有不平行于第一旋转轴线的第二旋转轴线(306)的第二转动关节(302)联接至彼此;和关节机构,用于使第一臂节段围绕第一旋转轴线和第二旋转轴线相对于第二臂节段铰接转动,所述关节机构包括:第一从动齿轮(312),其围绕与第一旋转轴线重合的转轴(317)布置,所述转轴与机械臂的第一臂节段紧固在一起;第二从动齿轮(313),其围绕第二旋转轴线布置,与机械臂的第二臂节段紧
关节组件和包括关节组件的运动辅助设备.pdf
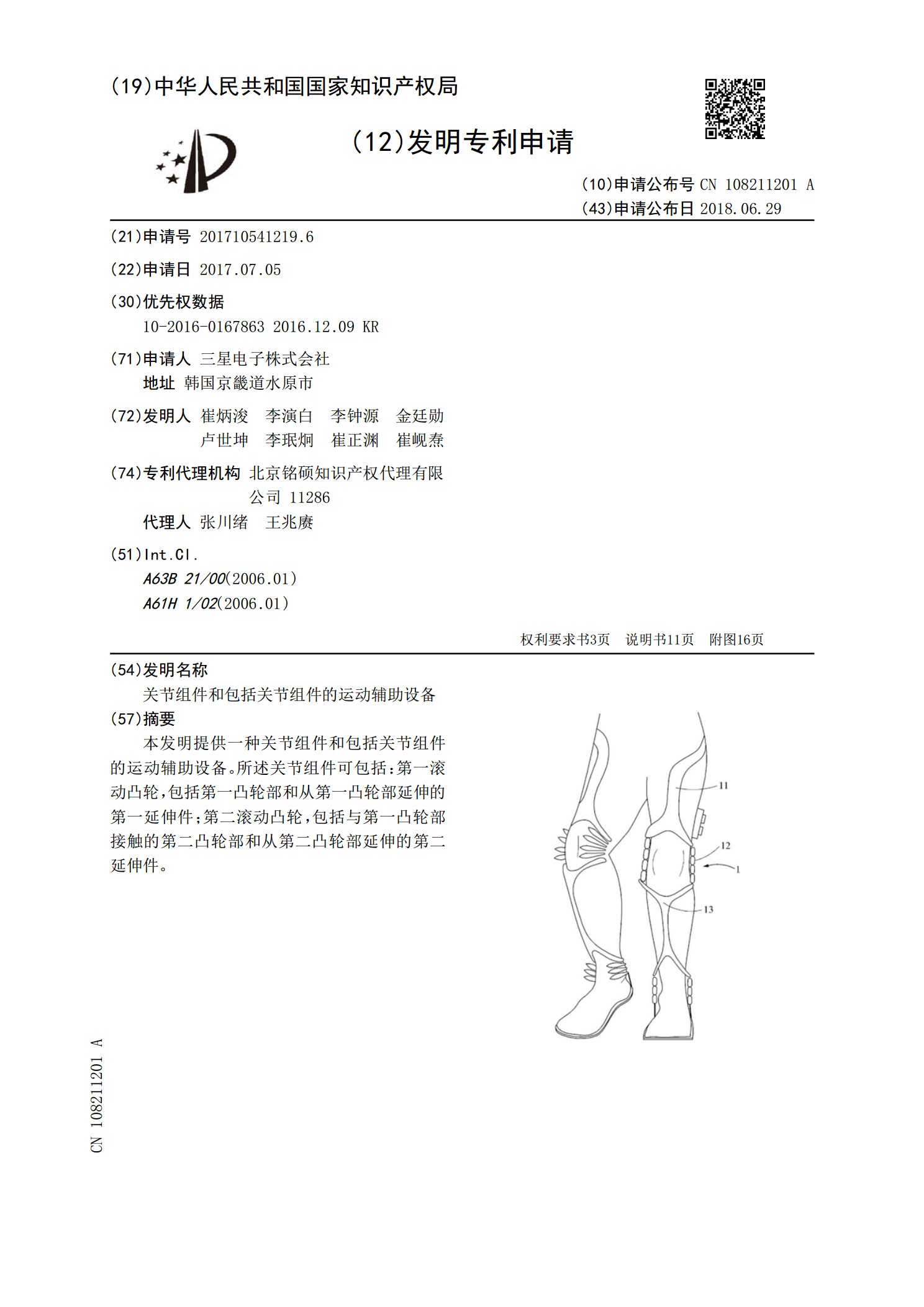
本发明提供一种关节组件和包括关节组件的运动辅助设备。所述关节组件可包括:第一滚动凸轮,包括第一凸轮部和从第一凸轮部延伸的第一延伸件;第二滚动凸轮,包括与第一凸轮部接触的第二凸轮部和从第二凸轮部延伸的第二延伸件。

多足机器人关节控制方法、装置和多足机器人.pdf
本发明实施例公开了一种多足机器人关节控制方法、装置和多足机器人,方法包括:构建躯干受力到所有支撑腿的足底期望支撑力的映射矩阵;对躯干受力进行目标优先级划分并确定每一优先级目标的权重矩阵并基于映射矩阵和权重矩阵构建各优先级目标关于足底期望支撑力的优化模型;对各优化模型依次求解以得到对应的足底期望支撑力;其中,当前优先级目标对应的足底期望支撑力作为下一优先级目标的足底期望支撑力的求解基础;基于足底期望支撑力和雅克比矩阵计算支撑腿的关节力矩以用于关节控制。本发明的技术方案可很好地解决现有技术中无论如何调整躯干受