
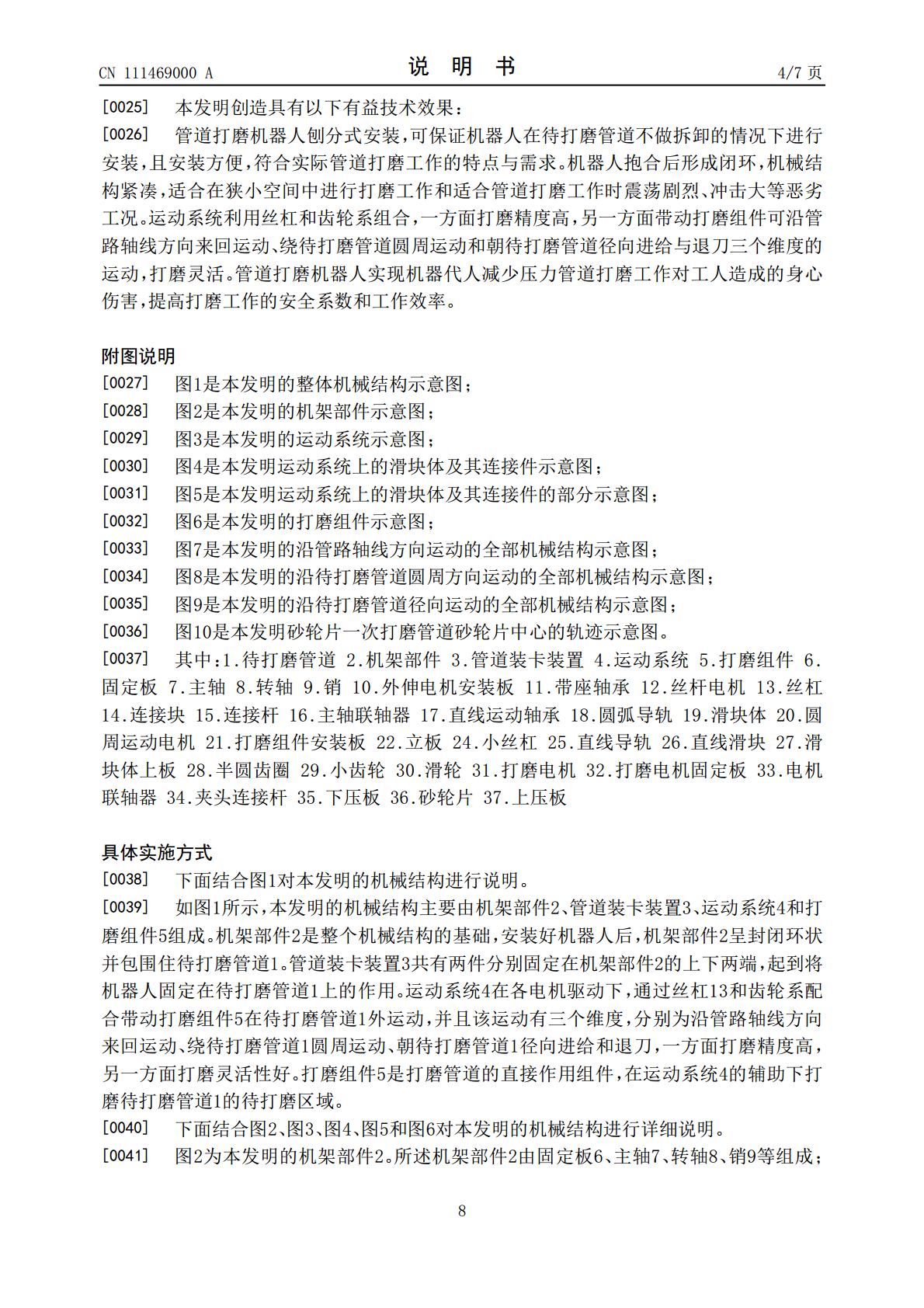
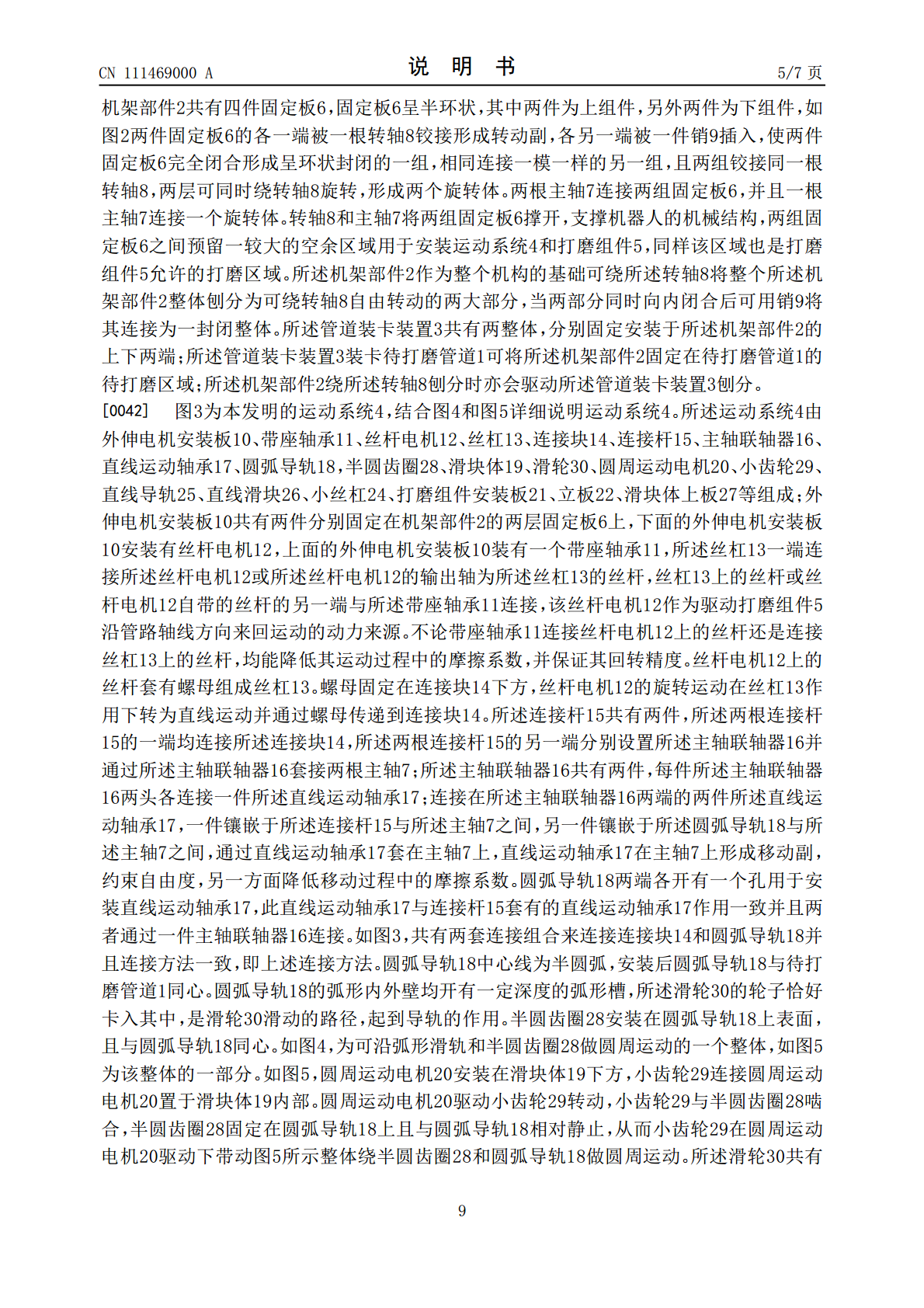
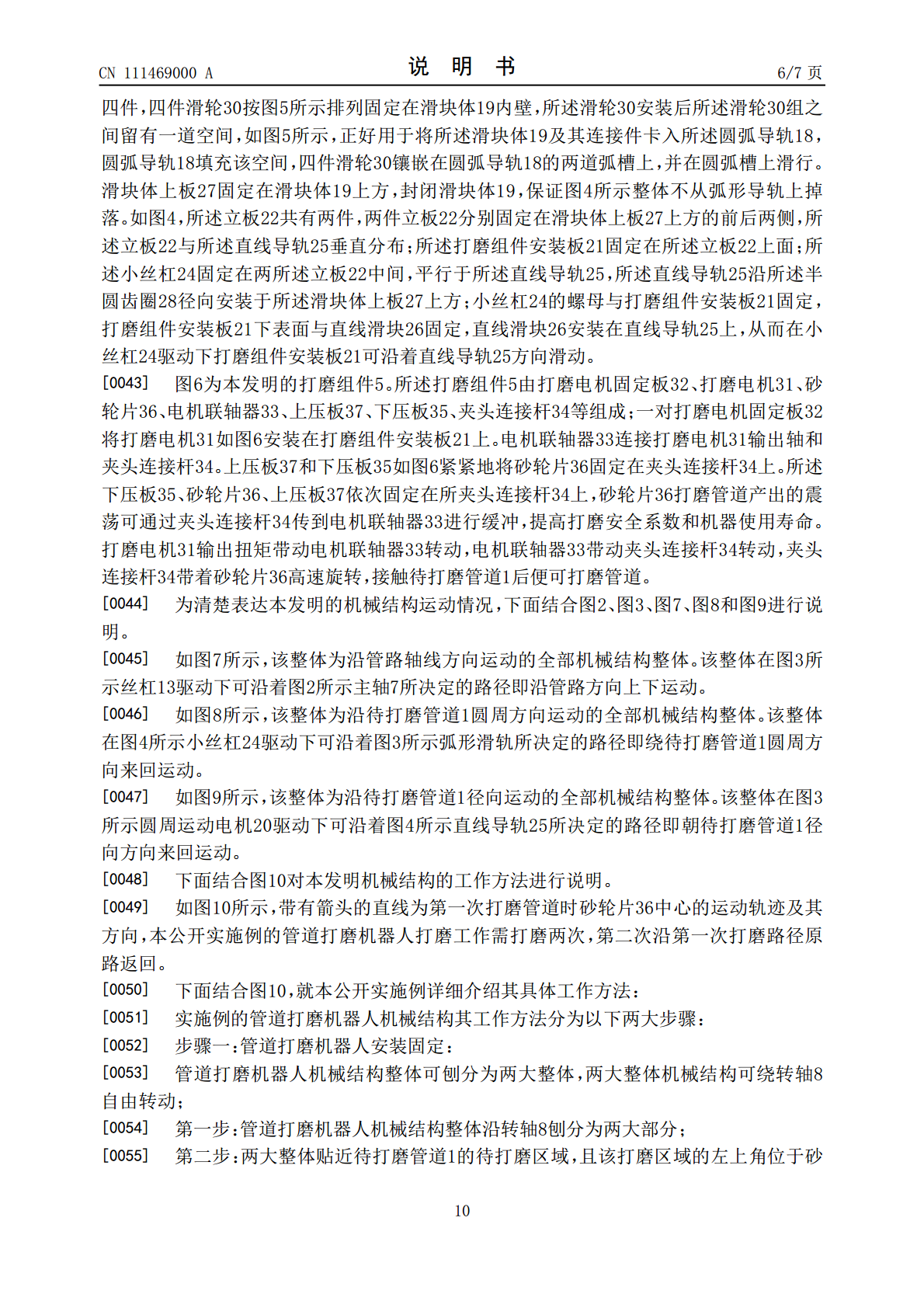
管道打磨机器人机械结构及其工作方法.pdf

邻家****66


1/10
2/10

3/10
4/10
5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

管道打磨机器人机械结构及其工作方法.pdf
本发明公开了一种管道打磨机器人机械结构,用于打磨管道。机械结构包括机架部件、管道装卡装置、运动系统、打磨组件;运动系统带动打磨组件沿三个维度自由运动,分别是沿管路轴线方向来回运动、绕待打磨管道轴线圆周运动、朝待打磨管道径向来回运动,打磨组件上装配的高速旋转电机驱动砂轮片可充分打磨待打磨管道的待打磨区域。本发明还公开该机械结构的工作方法,运动系统可沿管路轴线方向、待打磨管道圆周方向、待打磨管道径向三个维度自由运动,打磨组件安装在运动系统上,在运动系统的带动下,打磨组件可沿上述三个维度自由运动,并在打磨组件上

管外行走机器人机械结构及其工作方法.pdf
本发明公开了一种管外行走机器人机械结构及其工作方法,它由前后两节车体组成,两节车体通过一个平面铰链机构铰连接在一起,在在车体架的底面两侧安装有抱管行走机构。通过前后两节车体和抱管行走机构实现管外行走机器人可在各种姿态的管道或圆柱体外表面上行走,来满足对管道及各种圆柱型体工件的外部连续检测、维护或修复等需要。通过更换不同的支撑滚轮与行走滚轮的直径,一套机器人机构可以满足不同管径管道场合的应用。
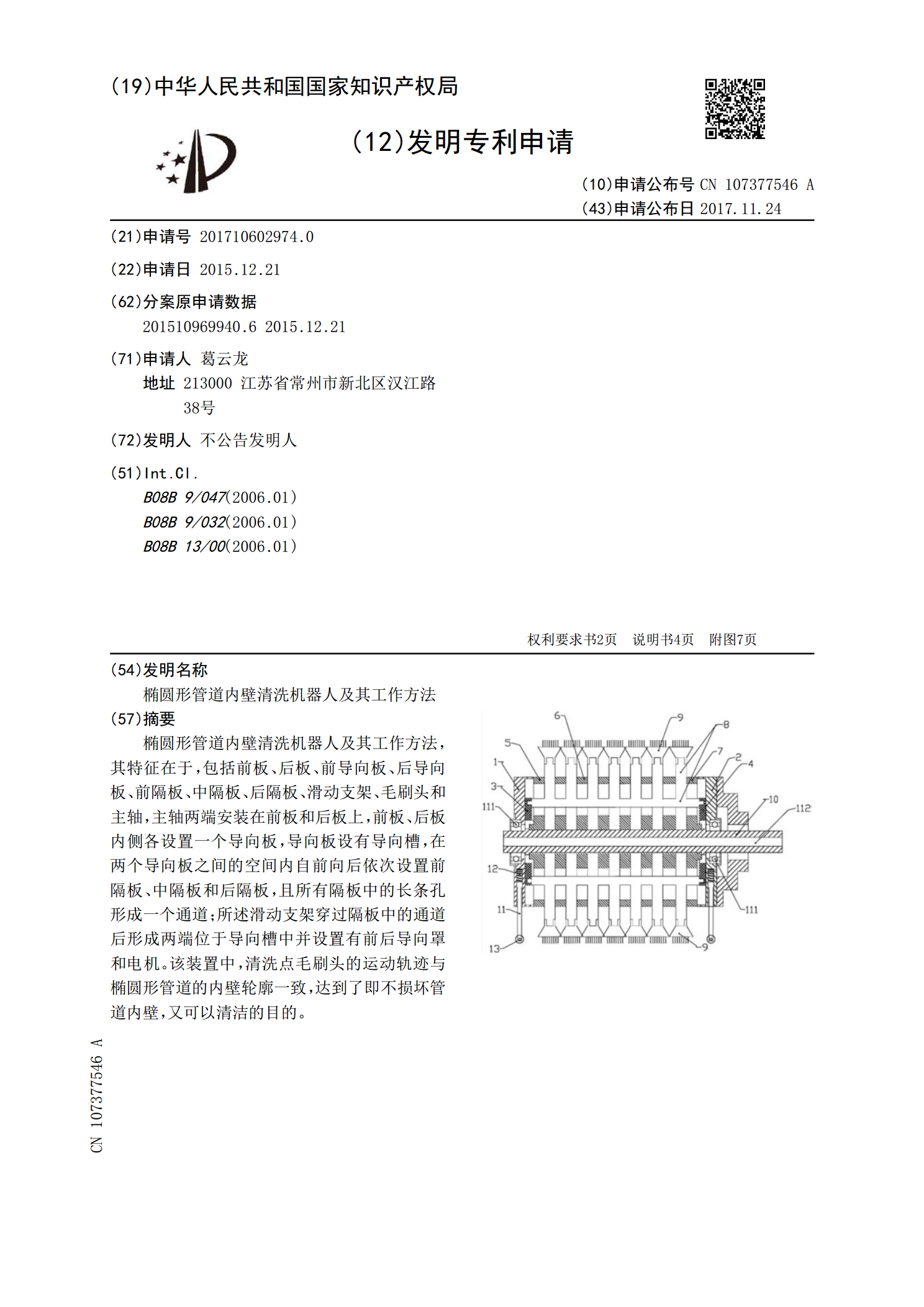
椭圆形管道内壁清洗机器人及其工作方法.pdf
椭圆形管道内壁清洗机器人及其工作方法,其特征在于,包括前板、后板、前导向板、后导向板、前隔板、中隔板、后隔板、滑动支架、毛刷头和主轴,主轴两端安装在前板和后板上,前板、后板内侧各设置一个导向板,导向板设有导向槽,在两个导向板之间的空间内自前向后依次设置前隔板、中隔板和后隔板,且所有隔板中的长条孔形成一个通道;所述滑动支架穿过隔板中的通道后形成两端位于导向槽中并设置有前后导向罩和电机。该装置中,清洗点毛刷头的运动轨迹与椭圆形管道的内壁轮廓一致,达到了即不损坏管道内壁,又可以清洁的目的。
一种管道机器人自适应框架及其在管道内的工作方法.pdf
本发明公开了一种管道机器人自适应框架及其在管道内的工作方法。本发明中单元体一包括子单元体一和子单元体二,单元体二由两个子单元体二组成;子单元体一包括作用筒一和作用筒二;子单元体二包括作用筒一和作用筒三;作用筒一和作用筒二以及作用筒一和作用筒三均通过活塞连接架连接,且活塞连接架与作用筒一、作用筒二和作用筒三之间均连接有弹簧;作用筒一和作用筒二外壁均铰接有滚轮;单元体一中子单元体一和子单元体二固定;单元体二中两个子单元体二固定;单元体一中子单元体二的每个作用筒三与单元体二中子单元体二周向位置对应的作用筒三通过

一种管道式智能喷涂机器人及其工作方法.pdf
本发明公开了一种管道式智能喷涂机器人及其工作方法,属于智能制造喷涂领域,一种管道式智能喷涂机器人,包括机架、多轮驱动单元和预紧变径机构三部分。通过在机架本体上面设置三个多轮驱动单元,且所述驱动轮呈120°分布,同时将驱动电机和驱动轮固定在同一支架上,简化了驱动单元,节省了设计空间。为了有效避免驱动轮打滑的现象,在所述驱动轮的外围包围着橡胶材料,有效的增加了静态摩擦系数,同时具有较好的弹性,同时驱动电机和驱动轮的传动方式采用同步带,在传动过程汇总保持恒定的出传动比,并且传动平稳,有一定的缓冲,减振能力,同时