
管外行走机器人机械结构及其工作方法.pdf

一只****懿呀


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

管外行走机器人机械结构及其工作方法.pdf
本发明公开了一种管外行走机器人机械结构及其工作方法,它由前后两节车体组成,两节车体通过一个平面铰链机构铰连接在一起,在在车体架的底面两侧安装有抱管行走机构。通过前后两节车体和抱管行走机构实现管外行走机器人可在各种姿态的管道或圆柱体外表面上行走,来满足对管道及各种圆柱型体工件的外部连续检测、维护或修复等需要。通过更换不同的支撑滚轮与行走滚轮的直径,一套机器人机构可以满足不同管径管道场合的应用。

一种管外行走机器人的控制系统及工作方法.pdf
本发明公开了一种管外行走机器人的控制系统及其工作方法,它是由安装在管外行走机器人机身上的前端摄像头、后端摄像头、无线收发器、嵌入式主控机和由工作人员遥控操作的手持式无线监控终端组成;本发明通过上述各部件控制管外行走机器人在错综复杂的管道环境中攀爬直管、弯管、T形管或十字形管等多种管型并且可以围绕管道左右旋转,满足了对管道及各种圆柱形体工件的外部连续检测、维护、修复或清洁等的应用需要。

管道打磨机器人机械结构及其工作方法.pdf
本发明公开了一种管道打磨机器人机械结构,用于打磨管道。机械结构包括机架部件、管道装卡装置、运动系统、打磨组件;运动系统带动打磨组件沿三个维度自由运动,分别是沿管路轴线方向来回运动、绕待打磨管道轴线圆周运动、朝待打磨管道径向来回运动,打磨组件上装配的高速旋转电机驱动砂轮片可充分打磨待打磨管道的待打磨区域。本发明还公开该机械结构的工作方法,运动系统可沿管路轴线方向、待打磨管道圆周方向、待打磨管道径向三个维度自由运动,打磨组件安装在运动系统上,在运动系统的带动下,打磨组件可沿上述三个维度自由运动,并在打磨组件上

钢结构自动行走挂载机器人及其行走方法.pdf
本发明公开了一种钢结构自动行走挂载机器人及其行走方法,包括:主体部;挂载部,安装于导向槽轮主体部上,导向槽轮挂载部适于搭载作业设备;行走部,包括沿前后方向排列的前行走脚和后行走脚,导向槽轮前行走脚和导向槽轮后行走脚择一安装于导向槽轮主体部上,另一与导向槽轮主体部沿前后方向滑动连接,导向槽轮前行走脚和导向槽轮后行走脚均包括电磁铁,导向槽轮电磁铁适于在通电时吸附于钢结构的表面并在断电时脱离导向槽轮钢结构的表面。本机器人巧妙地应用钢结构自身的导磁性,电磁铁能够在通电时吸附于钢结构的表面,能实现本机器人的自动行走
啮合驱动行走轮结构、巡线机器人机械结构及其越障方法.pdf
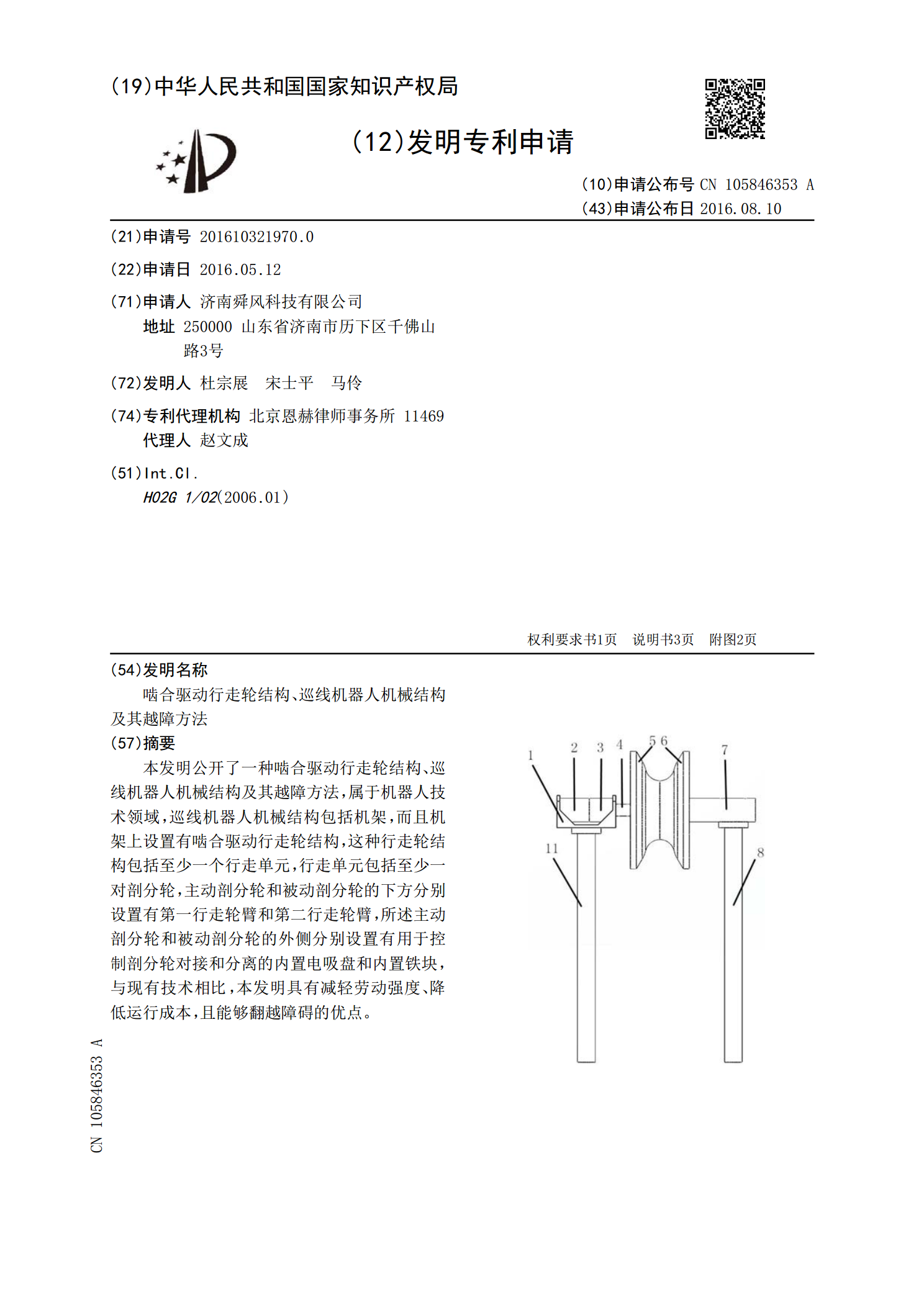
本发明公开了一种啮合驱动行走轮结构、巡线机器人机械结构及其越障方法,属于机器人技术领域,巡线机器人机械结构包括机架,而且机架上设置有啮合驱动行走轮结构,这种行走轮结构包括至少一个行走单元,行走单元包括至少一对剖分轮,主动剖分轮和被动剖分轮的下方分别设置有第一行走轮臂和第二行走轮臂,所述主动剖分轮和被动剖分轮的外侧分别设置有用于控制剖分轮对接和分离的内置电吸盘和内置铁块,与现有技术相比,本发明具有减轻劳动强度、降低运行成本,且能够翻越障碍的优点。