
高空作业车的行驶控制方法和行驶控制装置.pdf

思洁****爱吗

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共32页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
高空作业车的行驶控制方法和行驶控制装置.pdf
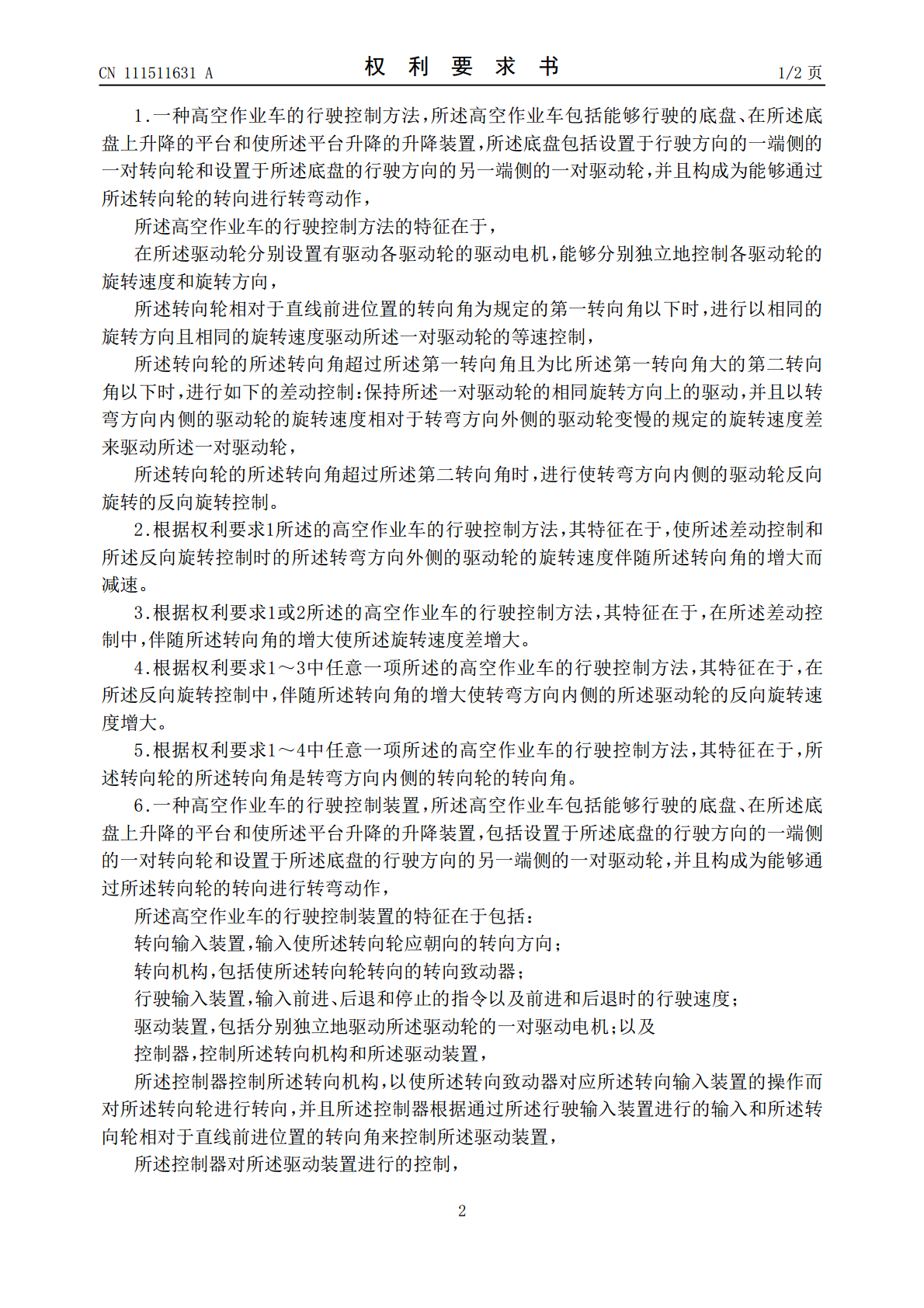
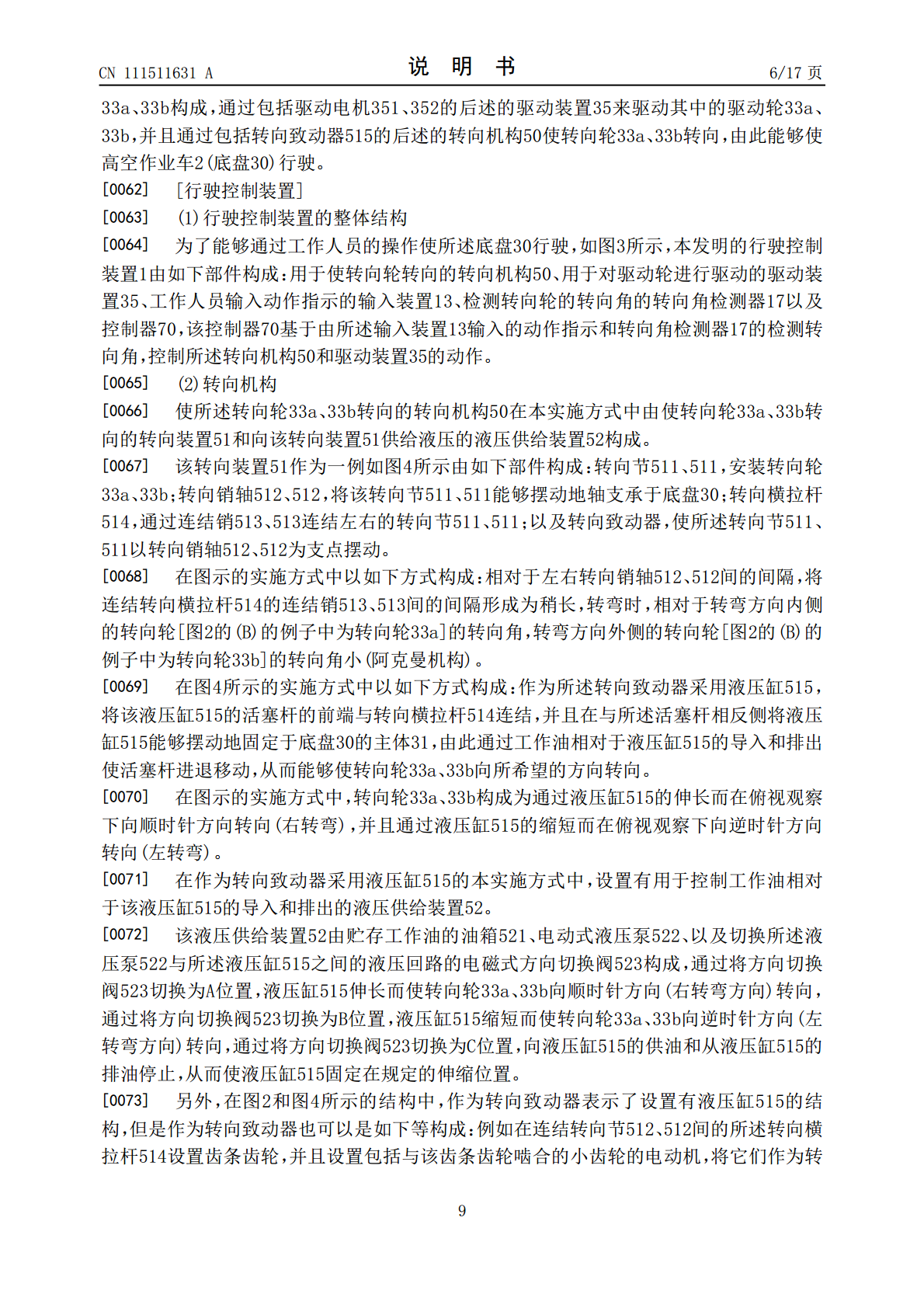
本发明提供高空作业车的行驶控制方法和行驶控制装置,大幅减少高空作业车的最小转弯半径。在高空作业车的驱动轮(33c、33d)分别设置有驱动电机(351、352),能够分别独立地控制各驱动轮(33c、33d)的旋转速度和旋转方向,转向轮(33a、33b)的转向角为第一转向角(作为一例为±6°)以下时,进行以相同的旋转方向、相同的旋转速度驱动两个驱动轮(33c、33d)的等速控制,超过第一转向角且为第二转向角(作为一例为±54°)以下时,进行使转弯方向内侧的驱动轮的旋转速度相对于转弯方向外侧的驱动轮变慢的差动控
行驶控制装置、以及行驶控制方法.pdf
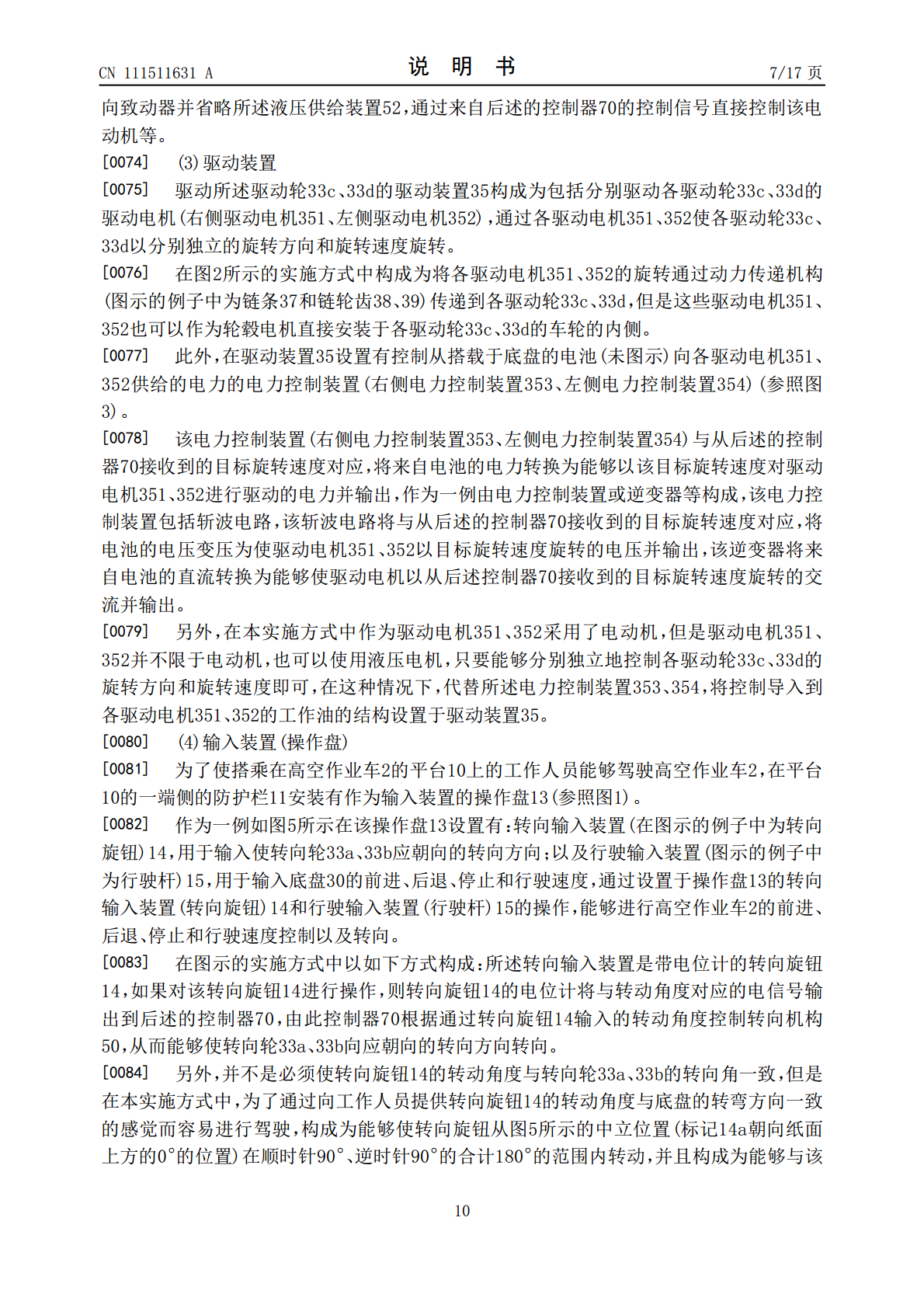
本发明提供一种行驶控制装置、能降低由于因本车辆的存在所产生的盲区区域而导致接近本车辆的移动物与其他车辆接触的可能性。本发明在车辆位于特定场景并且基于获取的车辆的外界信息而在车辆的侧方以及后方中的至少任一个中识别到移动物的情况、以及车辆位于特定场景并且基于获取的车辆的外界信息而在车辆的侧方以及后方的任一个中都没有识别到移动物的情况之间,使得特定场景中的车辆的纵向以及横向的移动的控制不同。
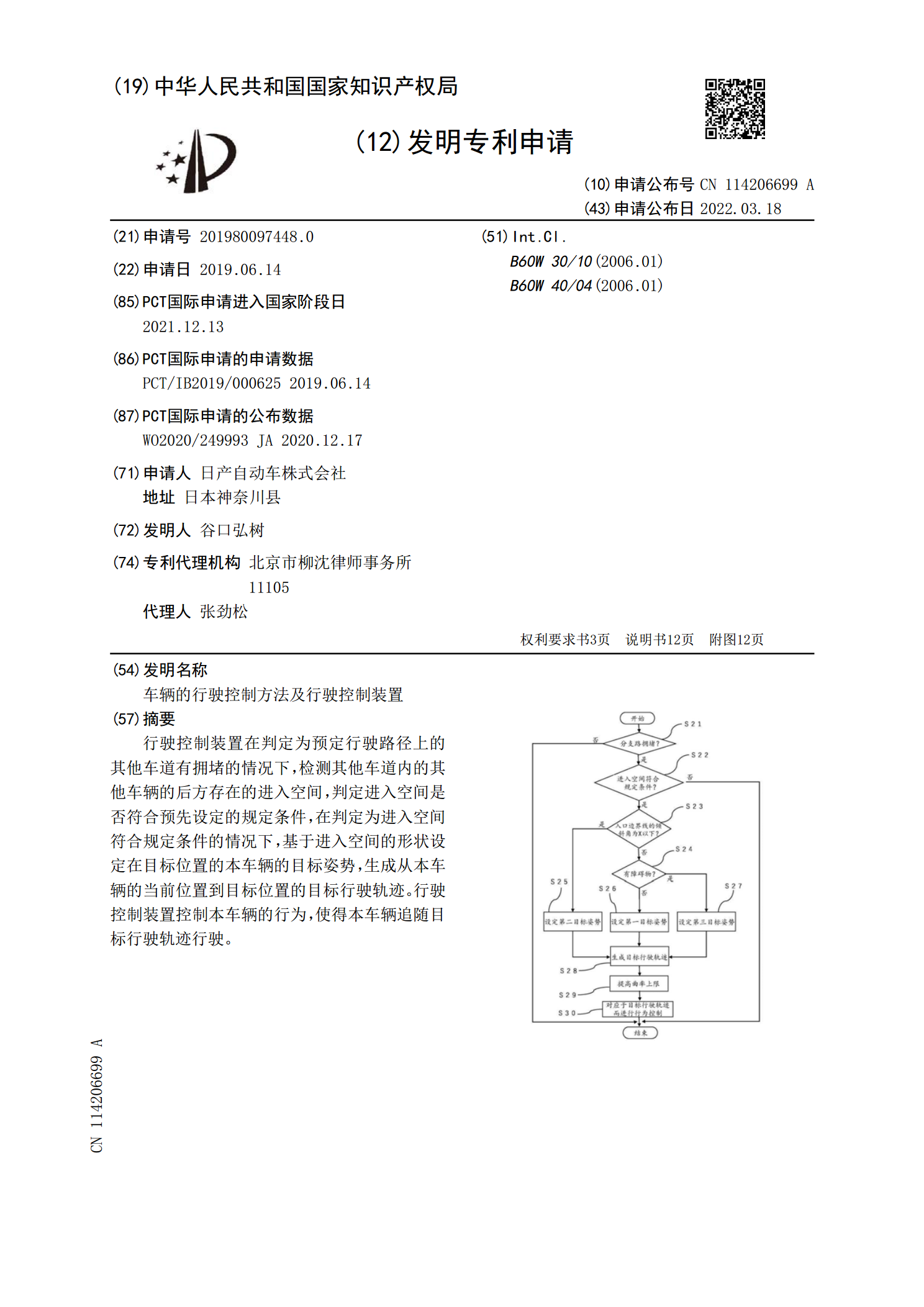
车辆的行驶控制方法及行驶控制装置.pdf
行驶控制装置在判定为预定行驶路径上的其他车道有拥堵的情况下,检测其他车道内的其他车辆的后方存在的进入空间,判定进入空间是否符合预先设定的规定条件,在判定为进入空间符合规定条件的情况下,基于进入空间的形状设定在目标位置的本车辆的目标姿势,生成从本车辆的当前位置到目标位置的目标行驶轨迹。行驶控制装置控制本车辆的行为,使得本车辆追随目标行驶轨迹行驶。
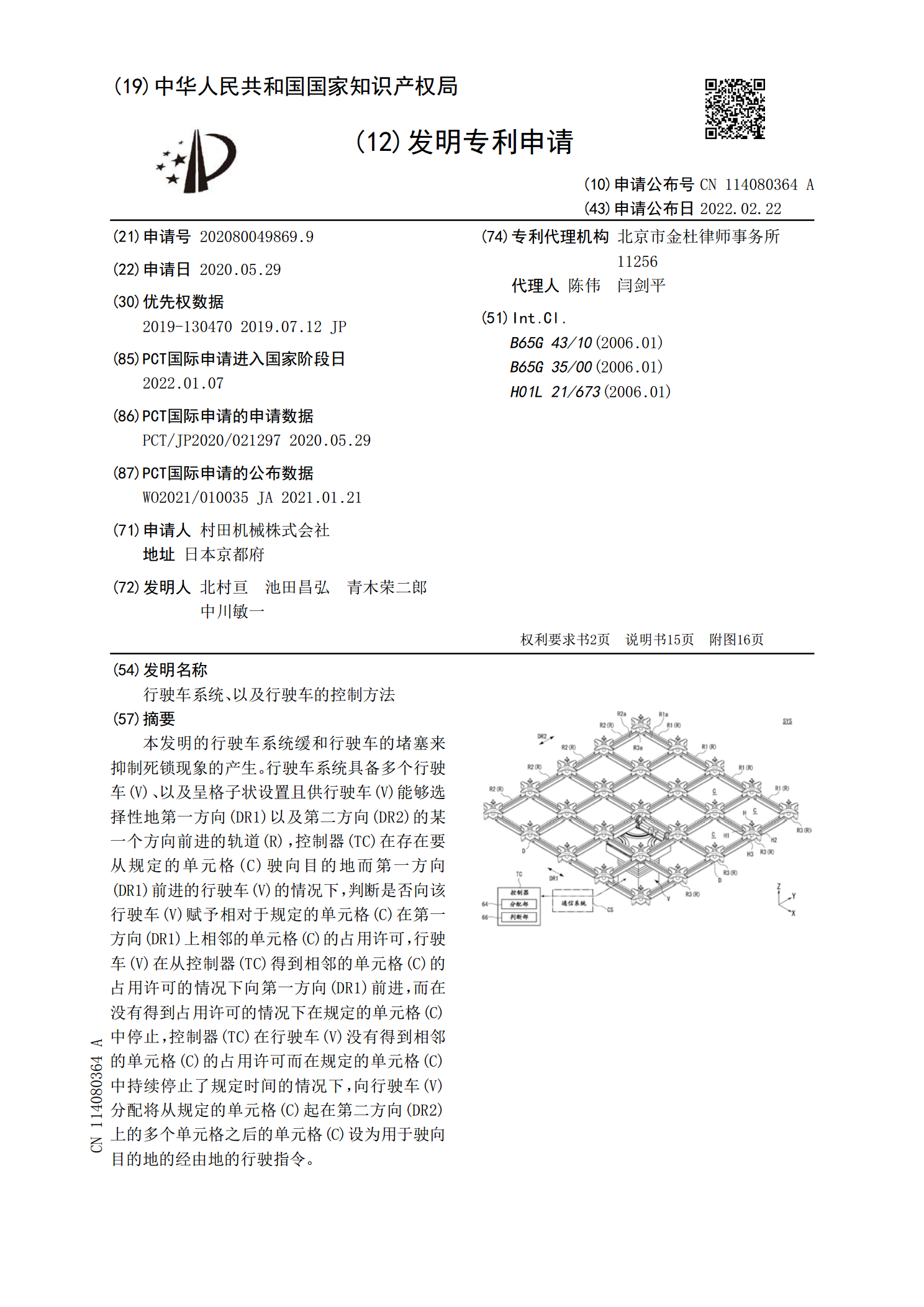
行驶车系统、以及行驶车的控制方法.pdf
本发明的行驶车系统缓和行驶车的堵塞来抑制死锁现象的产生。行驶车系统具备多个行驶车(V)、以及呈格子状设置且供行驶车(V)能够选择性地第一方向(DR1)以及第二方向(DR2)的某一个方向前进的轨道(R),控制器(TC)在存在要从规定的单元格(C)驶向目的地而第一方向(DR1)前进的行驶车(V)的情况下,判断是否向该行驶车(V)赋予相对于规定的单元格(C)在第一方向(DR1)上相邻的单元格(C)的占用许可,行驶车(V)在从控制器(TC)得到相邻的单元格(C)的占用许可的情况下向第一方向(DR1)前进,而在没有
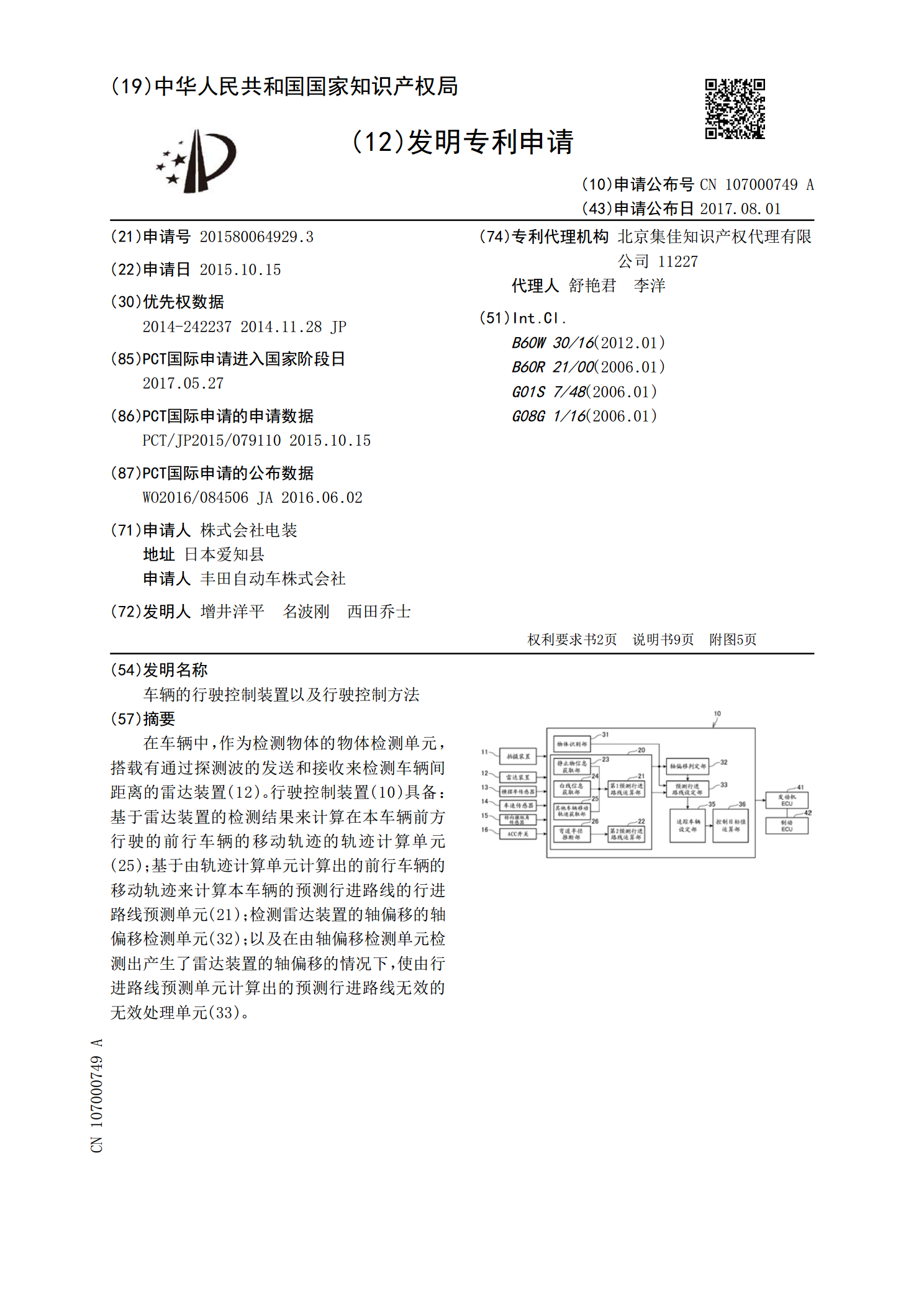
车辆的行驶控制装置以及行驶控制方法.pdf
在车辆中,作为检测物体的物体检测单元,搭载有通过探测波的发送和接收来检测车辆间距离的雷达装置(12)。行驶控制装置(10)具备:基于雷达装置的检测结果来计算在本车辆前方行驶的前行车辆的移动轨迹的轨迹计算单元(25);基于由轨迹计算单元计算出的前行车辆的移动轨迹来计算本车辆的预测行进路线的行进路线预测单元(21);检测雷达装置的轴偏移的轴偏移检测单元(32);以及在由轴偏移检测单元检测出产生了雷达装置的轴偏移的情况下,使由行进路线预测单元计算出的预测行进路线无效的无效处理单元(33)。