
一种行驶偏差的确定方法和装置.pdf

宜欣****外呢

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种行驶偏差的确定方法和装置.pdf
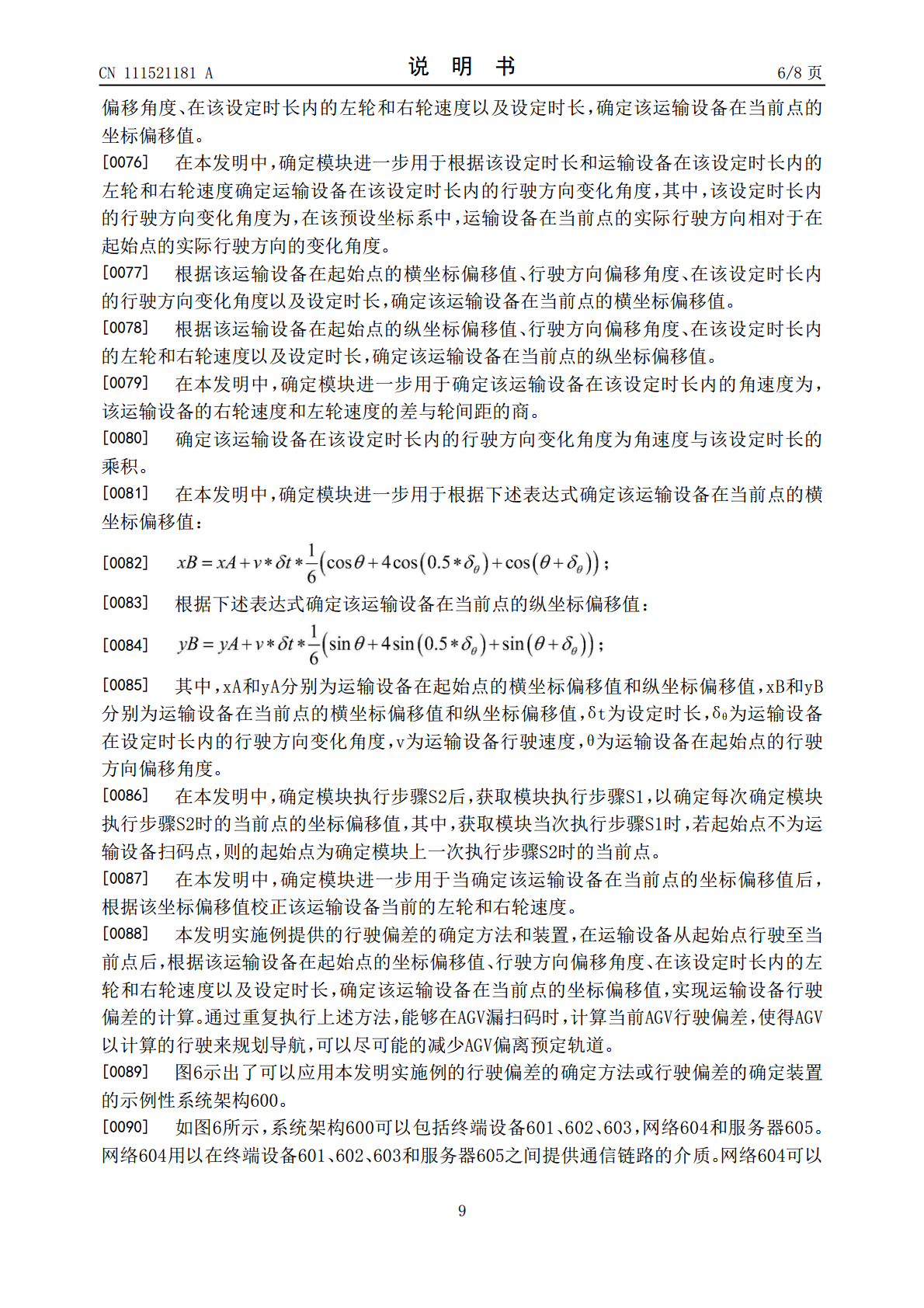
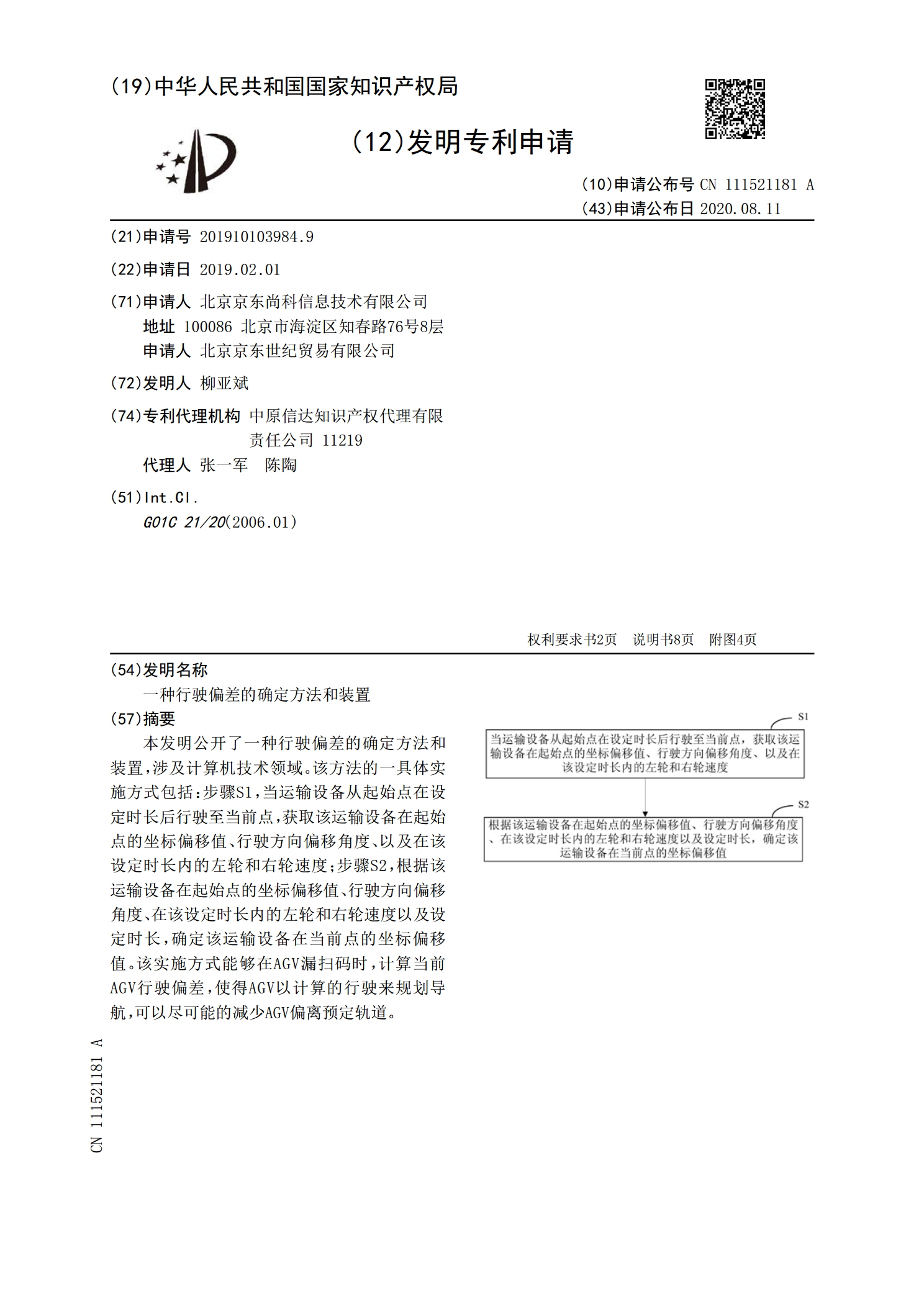
本发明公开了一种行驶偏差的确定方法和装置,涉及计算机技术领域。该方法的一具体实施方式包括:步骤S1,当运输设备从起始点在设定时长后行驶至当前点,获取该运输设备在起始点的坐标偏移值、行驶方向偏移角度、以及在该设定时长内的左轮和右轮速度;步骤S2,根据该运输设备在起始点的坐标偏移值、行驶方向偏移角度、在该设定时长内的左轮和右轮速度以及设定时长,确定该运输设备在当前点的坐标偏移值。该实施方式能够在AGV漏扫码时,计算当前AGV行驶偏差,使得AGV以计算的行驶来规划导航,可以尽可能的减少AGV偏离预定轨道。

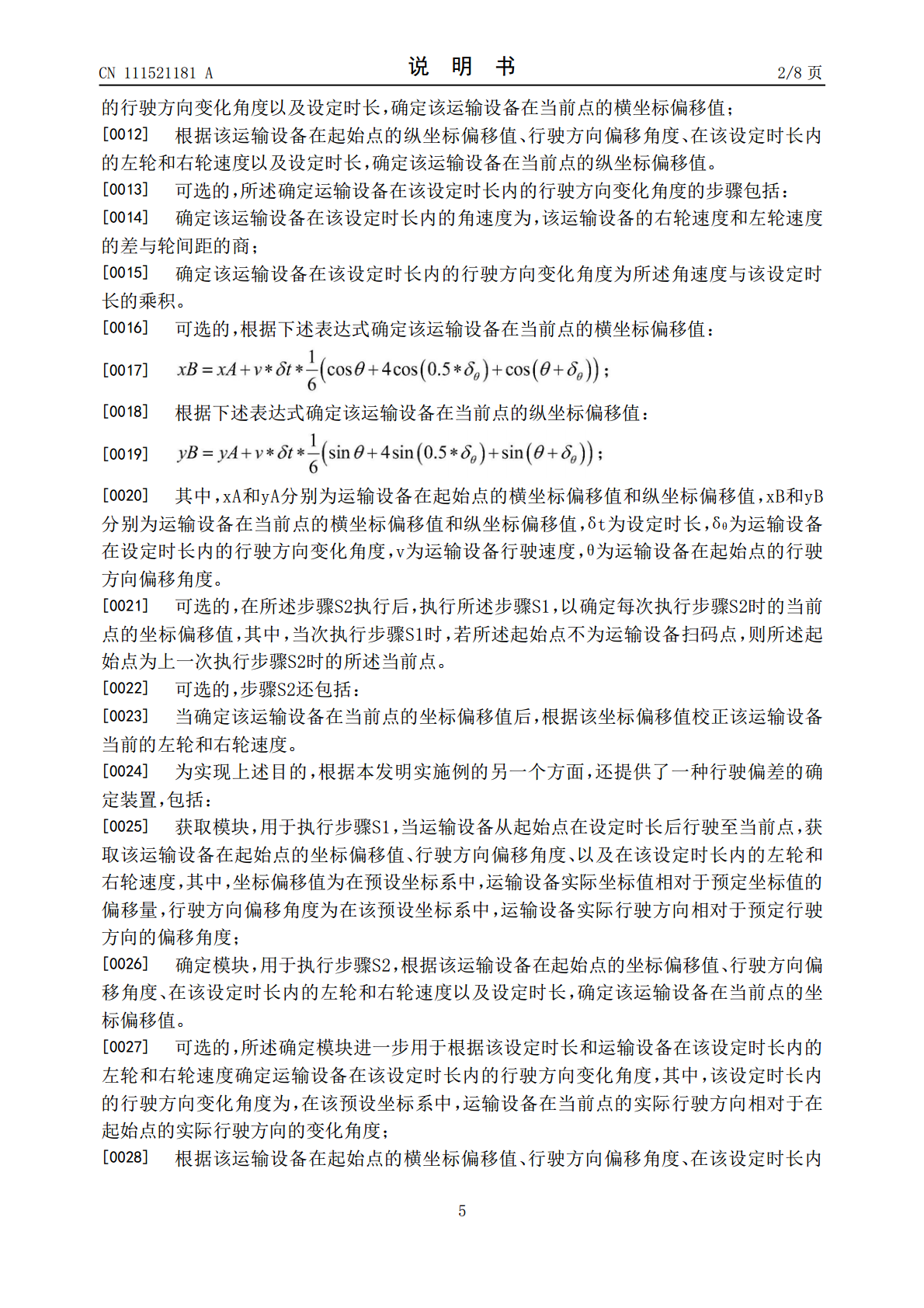
一种确定行驶路径的方法和装置.pdf
本发明公开了一种确定行驶路径的方法和装置,涉及计算机技术领域。该方法的一具体实施方式包括:对摄像头采集的模拟图像进行预处理,得到路面图像;从路面图像中识别出路面环境特征和障碍物特征,并根据障碍物特征计算障碍物风险值;根据路面环境特征和障碍物风险值确定车辆的行驶路径。该实施方式能够对路面的情况以及周围低矮物体进行识别分析,避免因无人车在行使的过程中被低矮障碍物阻挡,而造成较大颠簸或者车辆侧翻。
一种车辆行驶状态确定方法和相关装置.pdf
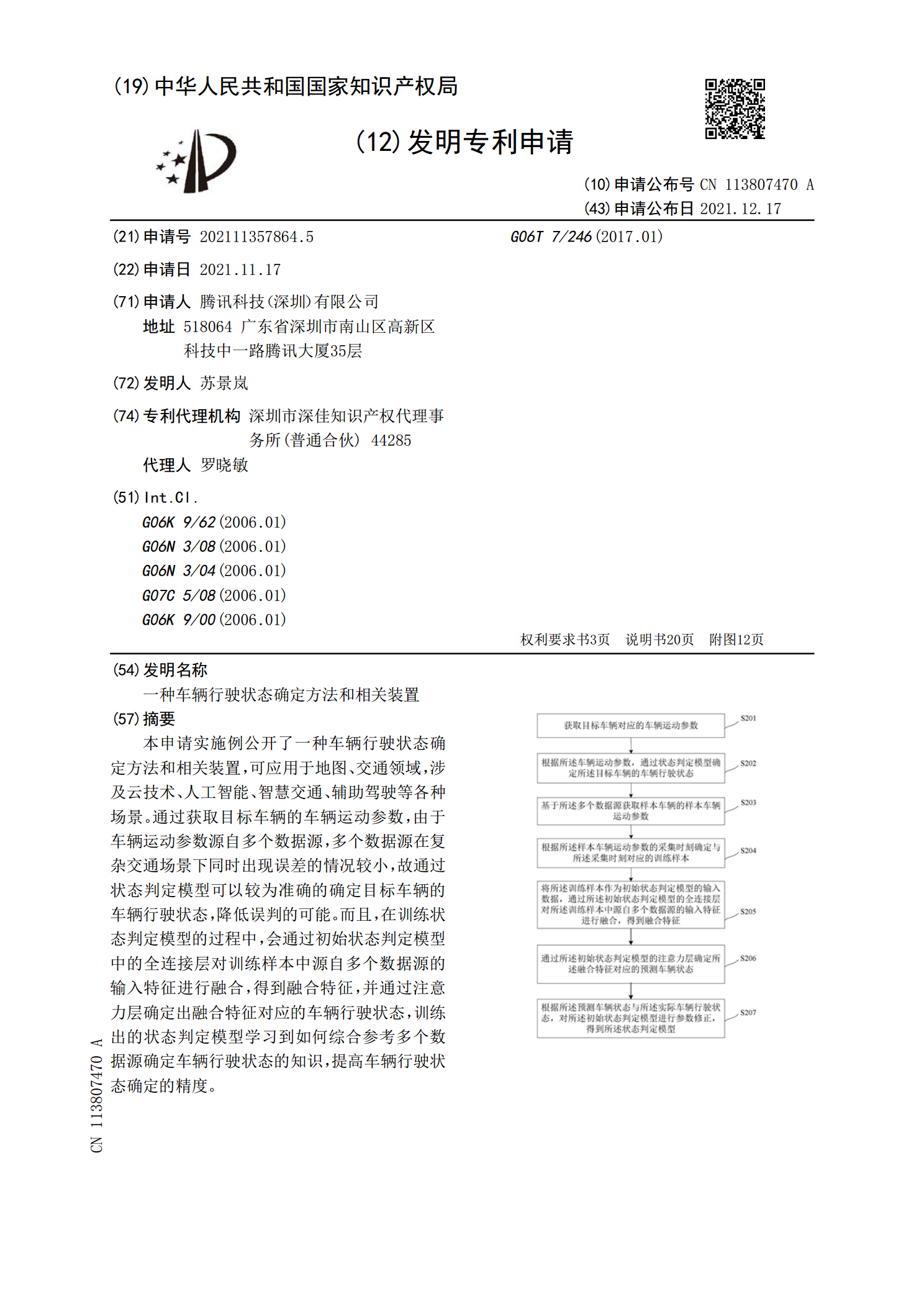
本申请实施例公开了一种车辆行驶状态确定方法和相关装置,可应用于地图、交通领域,涉及云技术、人工智能、智慧交通、辅助驾驶等各种场景。通过获取目标车辆的车辆运动参数,由于车辆运动参数源自多个数据源,多个数据源在复杂交通场景下同时出现误差的情况较小,故通过状态判定模型可以较为准确的确定目标车辆的车辆行驶状态,降低误判的可能。而且,在训练状态判定模型的过程中,会通过初始状态判定模型中的全连接层对训练样本中源自多个数据源的输入特征进行融合,得到融合特征,并通过注意力层确定出融合特征对应的车辆行驶状态,训练出的状态判
一种车辆行驶路径的确定方法和装置.pdf
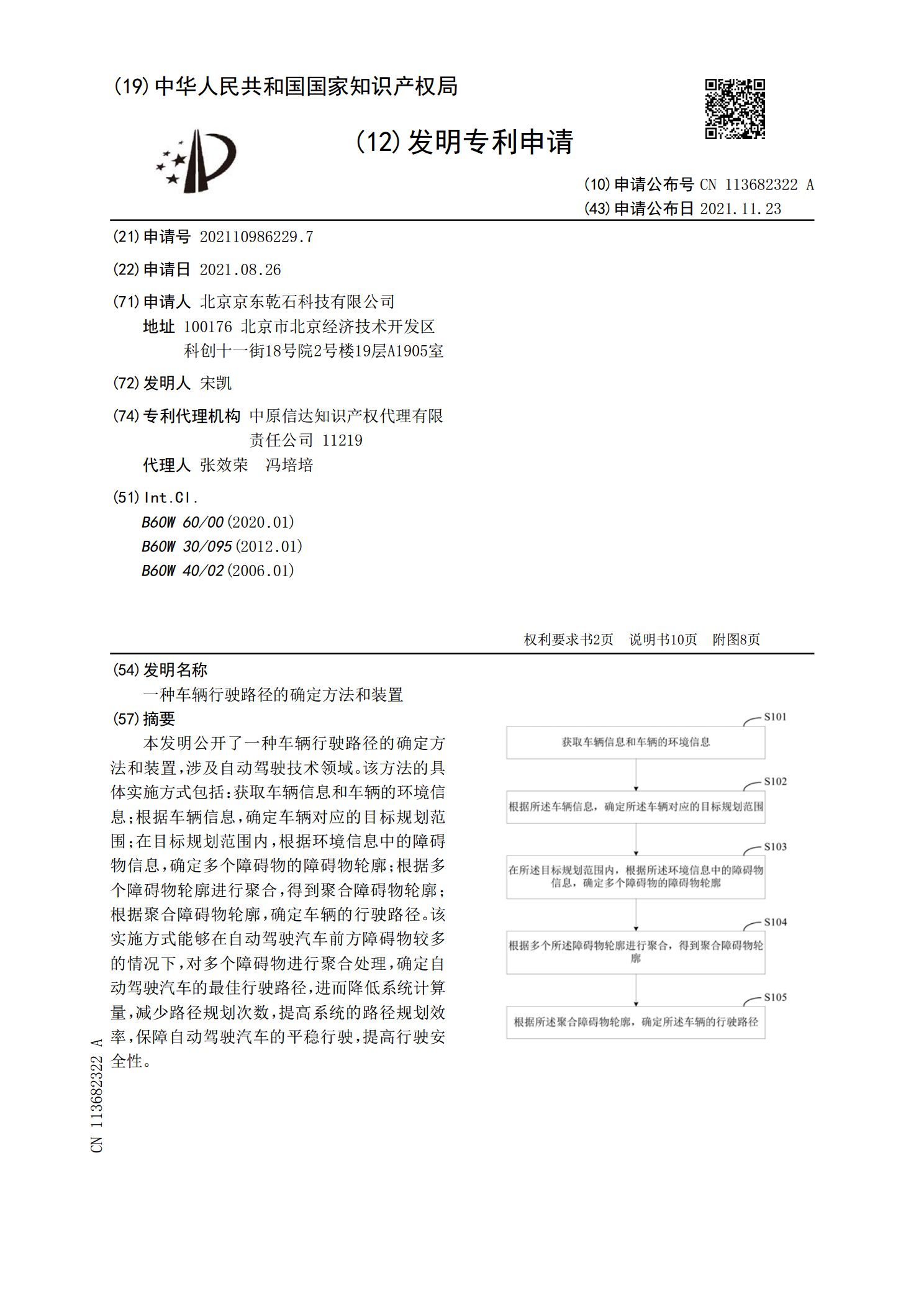
本发明公开了一种车辆行驶路径的确定方法和装置,涉及自动驾驶技术领域。该方法的具体实施方式包括:获取车辆信息和车辆的环境信息;根据车辆信息,确定车辆对应的目标规划范围;在目标规划范围内,根据环境信息中的障碍物信息,确定多个障碍物的障碍物轮廓;根据多个障碍物轮廓进行聚合,得到聚合障碍物轮廓;根据聚合障碍物轮廓,确定车辆的行驶路径。该实施方式能够在自动驾驶汽车前方障碍物较多的情况下,对多个障碍物进行聚合处理,确定自动驾驶汽车的最佳行驶路径,进而降低系统计算量,减少路径规划次数,提高系统的路径规划效率,保障自动驾

用于确定轮胎行驶里程的方法和装置.pdf
本发明涉及用于确定轮胎的行驶里程的方法和装置。在用于确定轮胎(10)的行驶里程的方法中,时间受限地第一次测量第一当前行驶里程,时间受限地第二次测量第二当前行驶里程,其中,在第一次测量和第二次测量之间设置不进行测量的静止时间间隔,在第一当前行驶里程和/或第二当前行驶里程的基础上估算所述静止时间间隔期间的行驶里程。此外重复该方法,其中已经实施的第二次测量在第一次测量的部位上进行。因为在所述静止时间间隔期间不必进行供能或可以至少显著降低供能,所以可以显著减少轮胎使用寿命期间用于行驶里程确定的能量需求。由此简化了