
机器人的关节单元、关节模组以及具有其的足式机器人.pdf

一吃****永贺

1/10

2/10
3/10

4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

机器人的关节单元、关节模组以及具有其的足式机器人.pdf
本发明公开了一种机器人的关节单元、关节模组以及具有其的足式机器人,关节单元包括:壳体、电机组件、传动机构、减速机构,电机组件的定子与壳体固定连接,转子与定子同轴设置且转子可转动地连接于壳体;传动机构包括主动件和从动件,主动件与转子连接;减速机构为行星轮系,行星架上形成有输出轴;其中,输出轴的旋转中心与转子的旋转中心彼此平行且间隔开。由此,关节单元采用电机组件与减速机构非同心的设计,降低了关节的厚度,结构更为紧凑;增加一道调速工序,增大传动比。关节模组采用多个并列设置的关节单元,具有多个自由度,多个关节单元
一种机器人集成关节单元及应用其的足式机器人.pdf
本发明公开了一种机器人集成关节单元及应用其的足式机器人,属于机器人关节技术领域。现有的双关节线路布置方式影响机器人结构安全以及美观,并且线材很容易损坏,影响线材的使用寿命。本发明包括第一电机及减速器总成、第二电机总成、第二减速器总成、第一输出连杆。本发明的双关节的双电机处于关节的同一侧,避免了电机动力线缆需要穿过关节,能够有效减缓电机动力线缆的疲劳损坏,延长电机电缆线材的使用寿命。本发明电机组件及关节连杆不需要预留专门的穿线孔以及线缆安置机构,使其结构更加可靠;进一步提升了双关节单元的集成度,降低了关节单
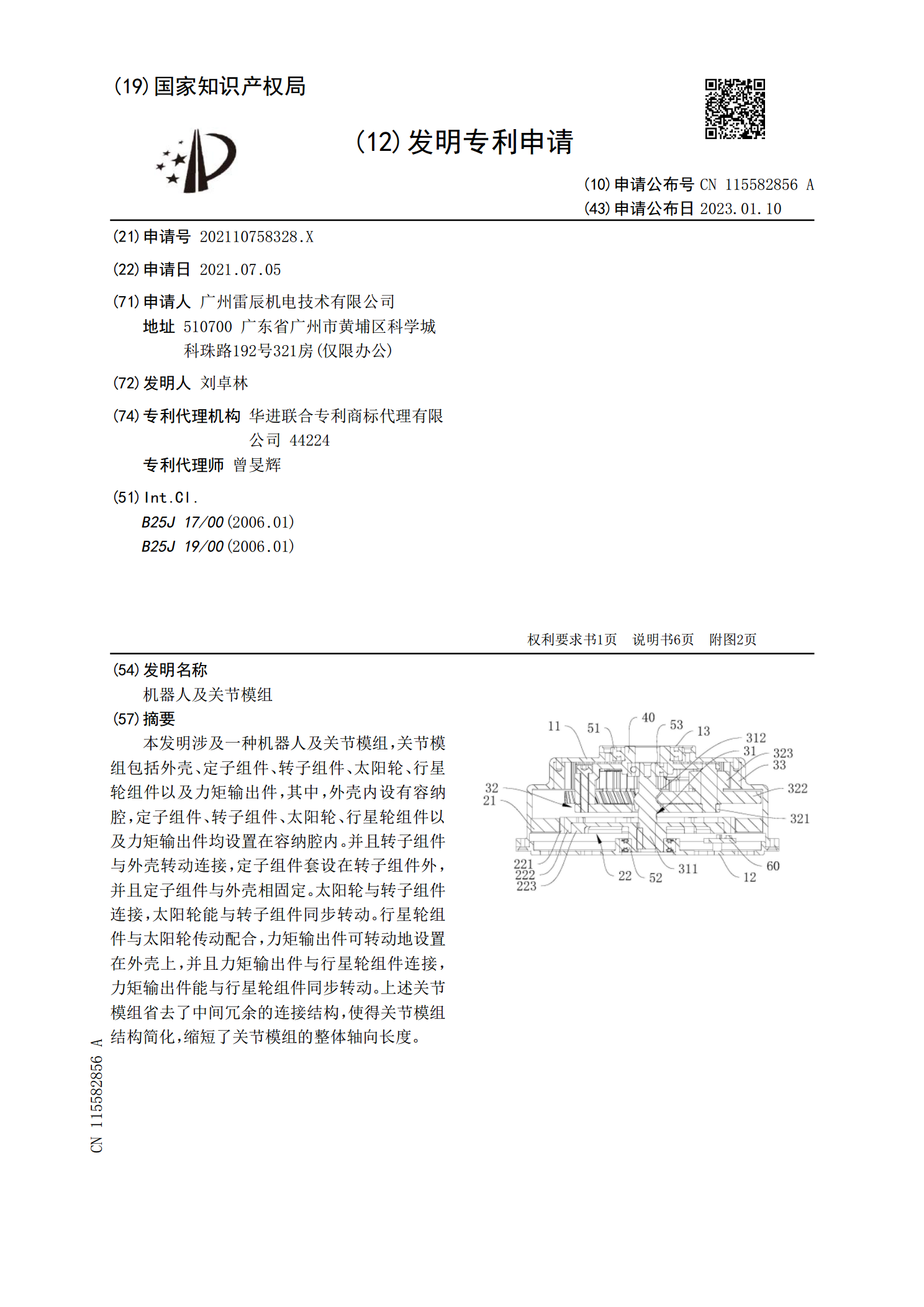
机器人及关节模组.pdf
本发明涉及一种机器人及关节模组,关节模组包括外壳、定子组件、转子组件、太阳轮、行星轮组件以及力矩输出件,其中,外壳内设有容纳腔,定子组件、转子组件、太阳轮、行星轮组件以及力矩输出件均设置在容纳腔内。并且转子组件与外壳转动连接,定子组件套设在转子组件外,并且定子组件与外壳相固定。太阳轮与转子组件连接,太阳轮能与转子组件同步转动。行星轮组件与太阳轮传动配合,力矩输出件可转动地设置在外壳上,并且力矩输出件与行星轮组件连接,力矩输出件能与行星轮组件同步转动。上述关节模组省去了中间冗余的连接结构,使得关节模组结构简

关节模组及协作机器人.pdf
本发明涉及自动控制技术领域,特别是涉及一种关节模组及协作机器人。关节模组包括关节驱动件、编码器和送风件。关节驱动件包括驱动定子和驱动转子,驱动定子构造有与外部环境连通的出风口。编码器连接于驱动转子,送风件与编码器沿驱动转子的轴向间隔。编码器、送风机和驱动定子之间形成流动通道,以形成在送风件的作用下灰尘能够依次经过的流动路径,经过流动路径的灰尘经过出风口排出。当送风件运行时,送风件送出的气流能够将流动通道内的灰尘例如制动器摩擦产生的灰尘,经出风口排出到关节模组外部。通过将关节模组内部的灰尘吹出,保持编码器所
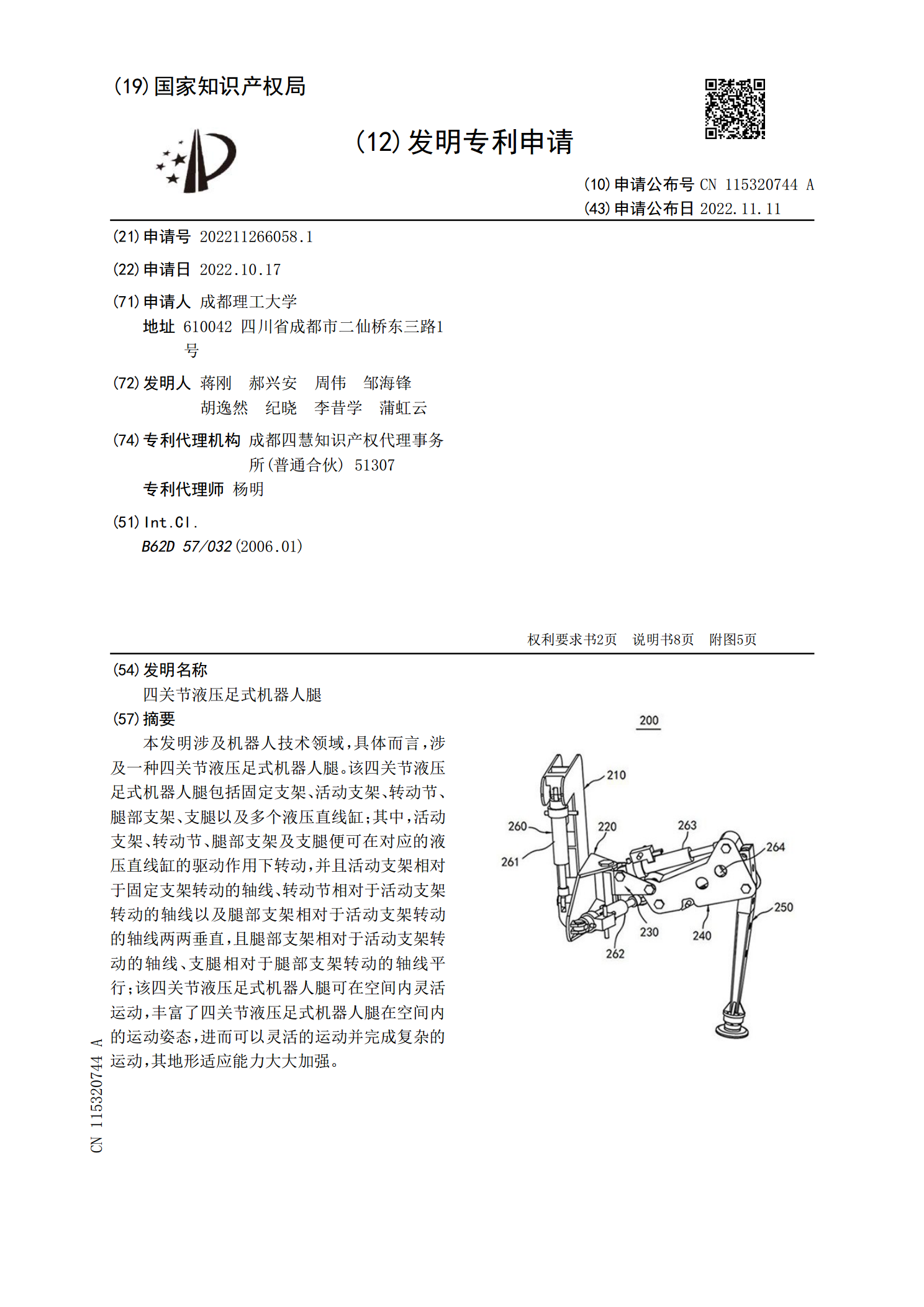
四关节液压足式机器人腿.pdf
本发明涉及机器人技术领域,具体而言,涉及一种四关节液压足式机器人腿。该四关节液压足式机器人腿包括固定支架、活动支架、转动节、腿部支架、支腿以及多个液压直线缸;其中,活动支架、转动节、腿部支架及支腿便可在对应的液压直线缸的驱动作用下转动,并且活动支架相对于固定支架转动的轴线、转动节相对于活动支架转动的轴线以及腿部支架相对于活动支架转动的轴线两两垂直,且腿部支架相对于活动支架转动的轴线、支腿相对于腿部支架转动的轴线平行;该四关节液压足式机器人腿可在空间内灵活运动,丰富了四关节液压足式机器人腿在空间内的运动姿态