
一种用于埋地油罐内壁除锈的爬壁机器人.pdf

一吃****永贺


1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种用于埋地油罐内壁除锈的爬壁机器人.pdf
本发明公开了一种用于埋地油罐内壁除锈的爬壁机器人,包括驱动齿轮、履带、驱动电机、永磁吸附体、万向联轴器、转向轮、转向电机、转向轴、升降装置、高压喷嘴、喷嘴支架、驱动电机,驱动电机安装在驱动轴上,驱动轴与驱动齿轮相连,驱动齿轮与履带链轮配合,永磁吸附体安装在机器人底架上。本发明爬壁机器人,可用来对在役埋地油罐进行除锈等保养工作。在役油罐工作时处于密闭状态,存在大量的易燃易爆介质,且含氧量极低,若是人工进入工作需要前期大量的准备工作并且极其不安全,使用爬壁机器人代替工人进入危险性极高的在役埋地油罐工作,既能保

一种除锈爬壁机器人.pdf
本实用新型涉及除锈作业技术领域,具体地说就是一种除锈爬壁机器人。一种除锈爬壁机器人,包括机器人主体、连接盘和清扫部,所述机器人主体呈圆柱状,所述机器人主体的底面均匀设有若干个磁铁轮和固定磁块,固定磁块与机器人主体的底面滑动连接,机器人主体的圆周侧面向内凹陷形成连接槽,连接盘与所述连接槽转动连接,所述清扫部水平连接于连接盘的外侧。本申请的除锈机器人与船舶表面接触面积小,体积小,方便对船舶和设备表面不同角度和不同形状的位置进行除锈,使用方便快捷。

爬壁除锈机器人.pdf
本发明提供一种爬壁除锈机器人,用于船舶、大型钢制容器罐表面的除锈清洁工作。所述的机器人包括行走机构、吸附机构、驱动机构以及远程遥控系统,所述的行走机构包括皮带、主动轮、万向轮,所述的吸附机构主要由永磁铁组成,所述的驱动机构包括驱动电机、减速器以及蜗轮蜗杆减速器,所述的远程遥控系统包括图像传输系统以及遥控系统。所述的机器人通过吸附机构垂直吸附在工作壁面上,驱动电机经过减速器以及蜗轮蜗杆减速器驱动主动轮行走,远程遥控系统的作用在于能够远距离检测作业效果并进行实时控制。本发明具有操作方便、工作效率高的优点。
一种用于管道内壁除锈的机器人.pdf
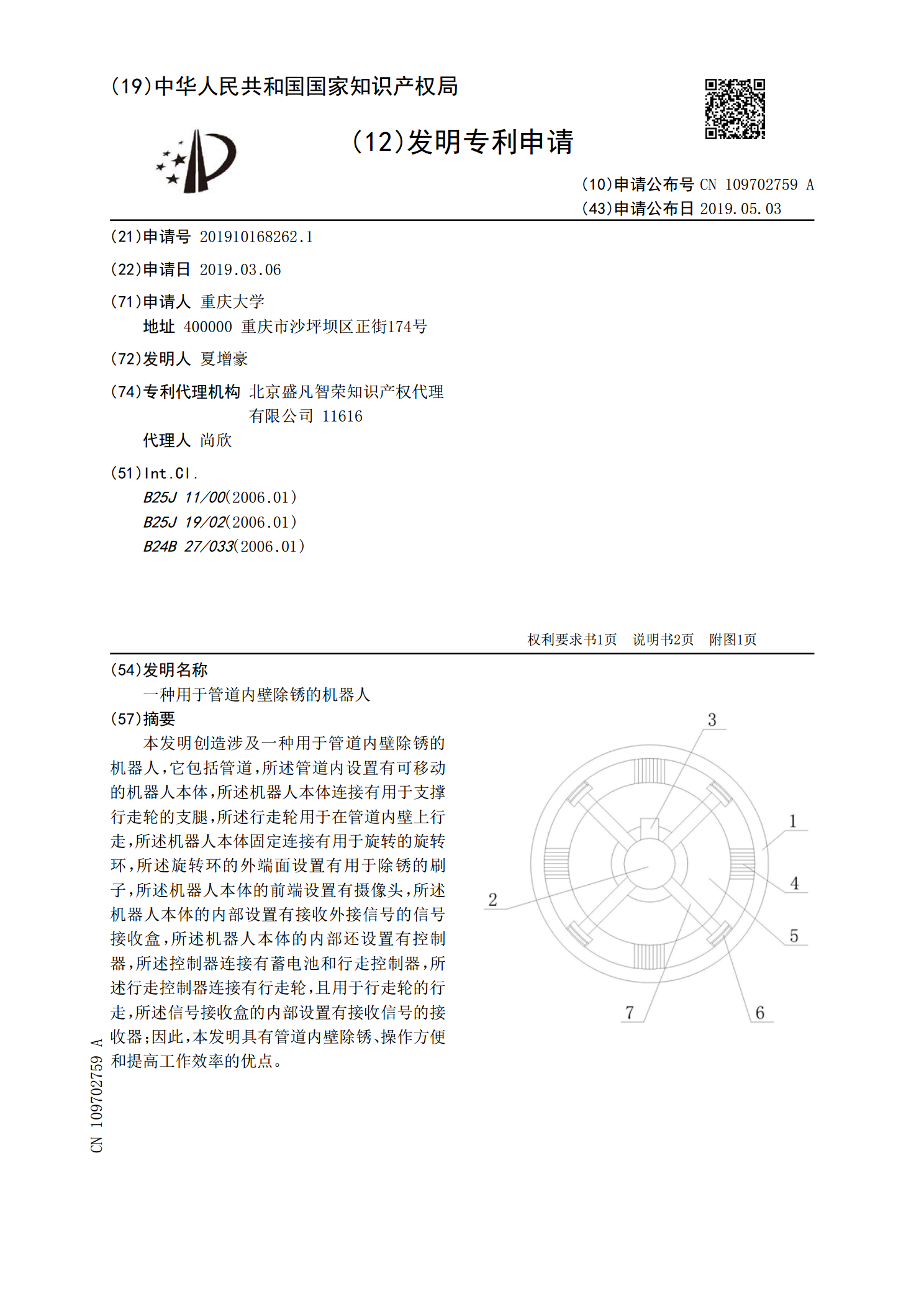
本发明创造涉及一种用于管道内壁除锈的机器人,它包括管道,所述管道内设置有可移动的机器人本体,所述机器人本体连接有用于支撑行走轮的支腿,所述行走轮用于在管道内壁上行走,所述机器人本体固定连接有用于旋转的旋转环,所述旋转环的外端面设置有用于除锈的刷子,所述机器人本体的前端设置有摄像头,所述机器人本体的内部设置有接收外接信号的信号接收盒,所述机器人本体的内部还设置有控制器,所述控制器连接有蓄电池和行走控制器,所述行走控制器连接有行走轮,且用于行走轮的行走,所述信号接收盒的内部设置有接收信号的接收器;因此,本发明

船舶除锈爬壁机器人.pdf
本发明适用于爬壁机器人技术领域,提供了一种船舶除锈爬壁机器人,旨在解决现有技术中船舶除锈爬壁机器人越障能力差的技术问题。该船舶除锈爬壁机器人包括清洗盘、与船舶壁面接触的履带、驱动组件、具有从动轮的从动浮动组件、安带动清洗盘相对船舶壁面自动上下运动的浮动连接组件以及提供预压力以压紧履带的压紧组件。该船舶除锈爬壁机器人利用驱动件驱动主动轮以带动从动轮运动,从而带动履带在船舶壁面上行走;于行走过程中遇到障碍物时,利用浮动连接组件带动清洗盘越过障碍物,同时,履带的内拉力增大,使得主动轮与从动轮之间的中心距减小以使