
一种用于管道内壁除锈的机器人.pdf

星星****眨眼


1/5

2/5
3/5
4/5
5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种用于管道内壁除锈的机器人.pdf
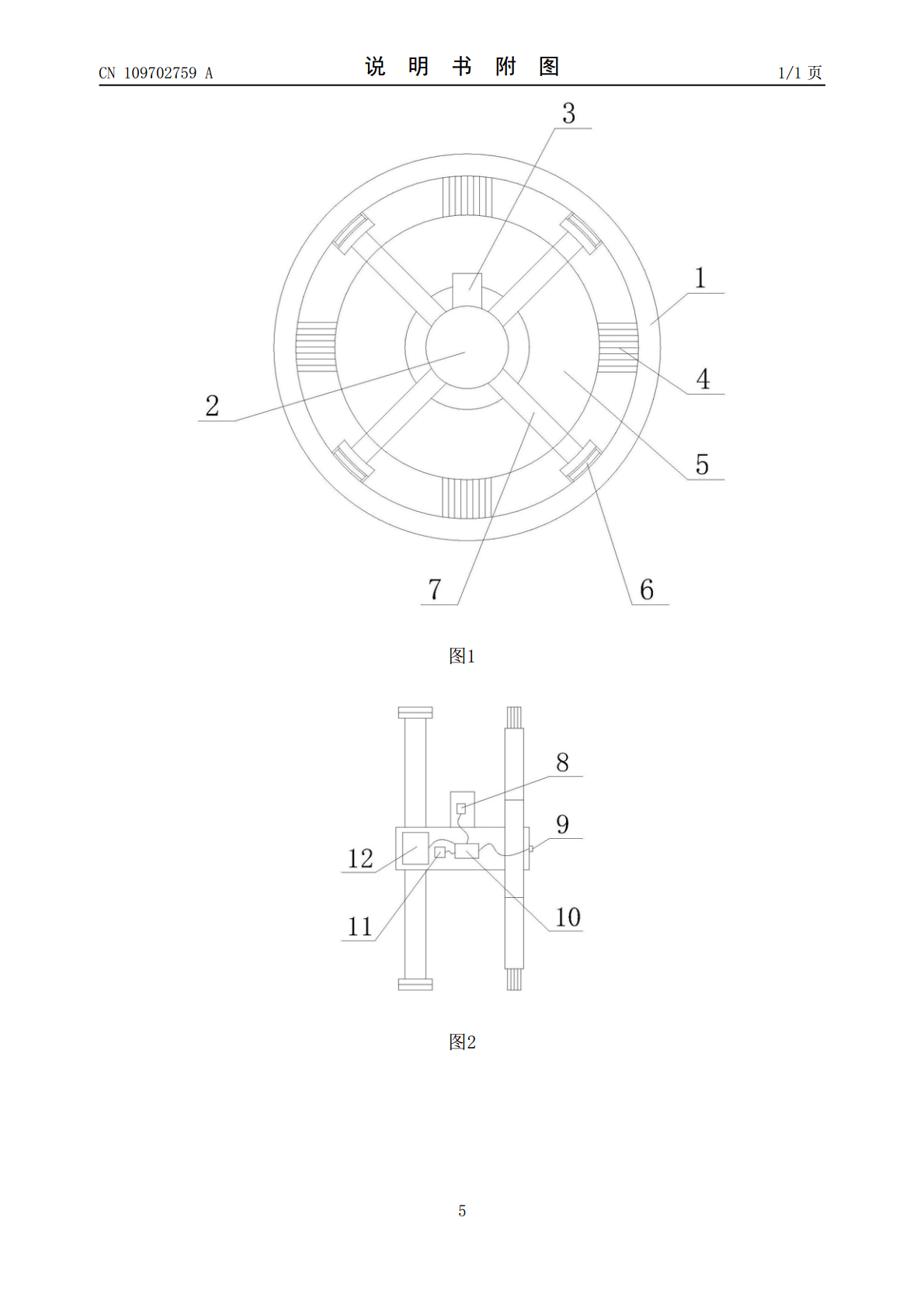
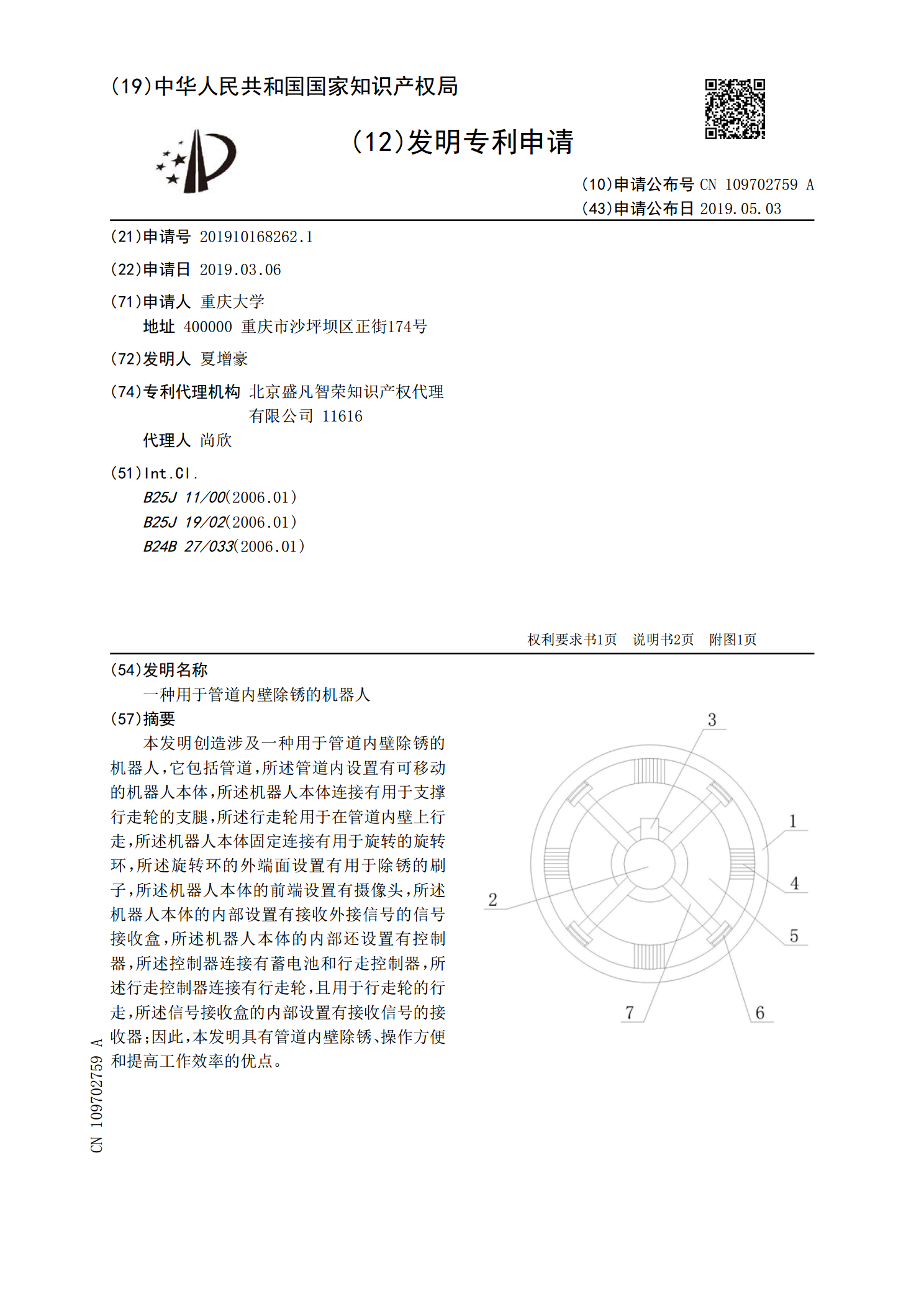
本发明创造涉及一种用于管道内壁除锈的机器人,它包括管道,所述管道内设置有可移动的机器人本体,所述机器人本体连接有用于支撑行走轮的支腿,所述行走轮用于在管道内壁上行走,所述机器人本体固定连接有用于旋转的旋转环,所述旋转环的外端面设置有用于除锈的刷子,所述机器人本体的前端设置有摄像头,所述机器人本体的内部设置有接收外接信号的信号接收盒,所述机器人本体的内部还设置有控制器,所述控制器连接有蓄电池和行走控制器,所述行走控制器连接有行走轮,且用于行走轮的行走,所述信号接收盒的内部设置有接收信号的接收器;因此,本发明

一种管道内壁除锈装置.pdf
本发明公开了一种管道内壁除锈装置,包括固定机构、驱动电机、连接座、两个以连接座为中心左右对称的除锈机构,固定机构包括有固定板、两个定位板、传送电机和螺纹传送杆,驱动电机右端面中心位置与螺纹传送杆的左端转动连接,驱动电机的左端面通过两根连接杆连接有内腔为中空结构的中空盒,驱动电机通过动力轴转动贯穿中空盒的右端面,且连接有位于中空盒内腔的第一伞齿轮,中空盒的内腔前侧侧壁通过销轴转动连接有第二伞齿轮,两个所述除锈机构均包括有螺纹杆、螺纹套筒、滑动套筒、若干个呈环形均匀间隔分布的调节块和若干个呈环形均匀间隔分布的
一种管道内壁除锈装置.pdf
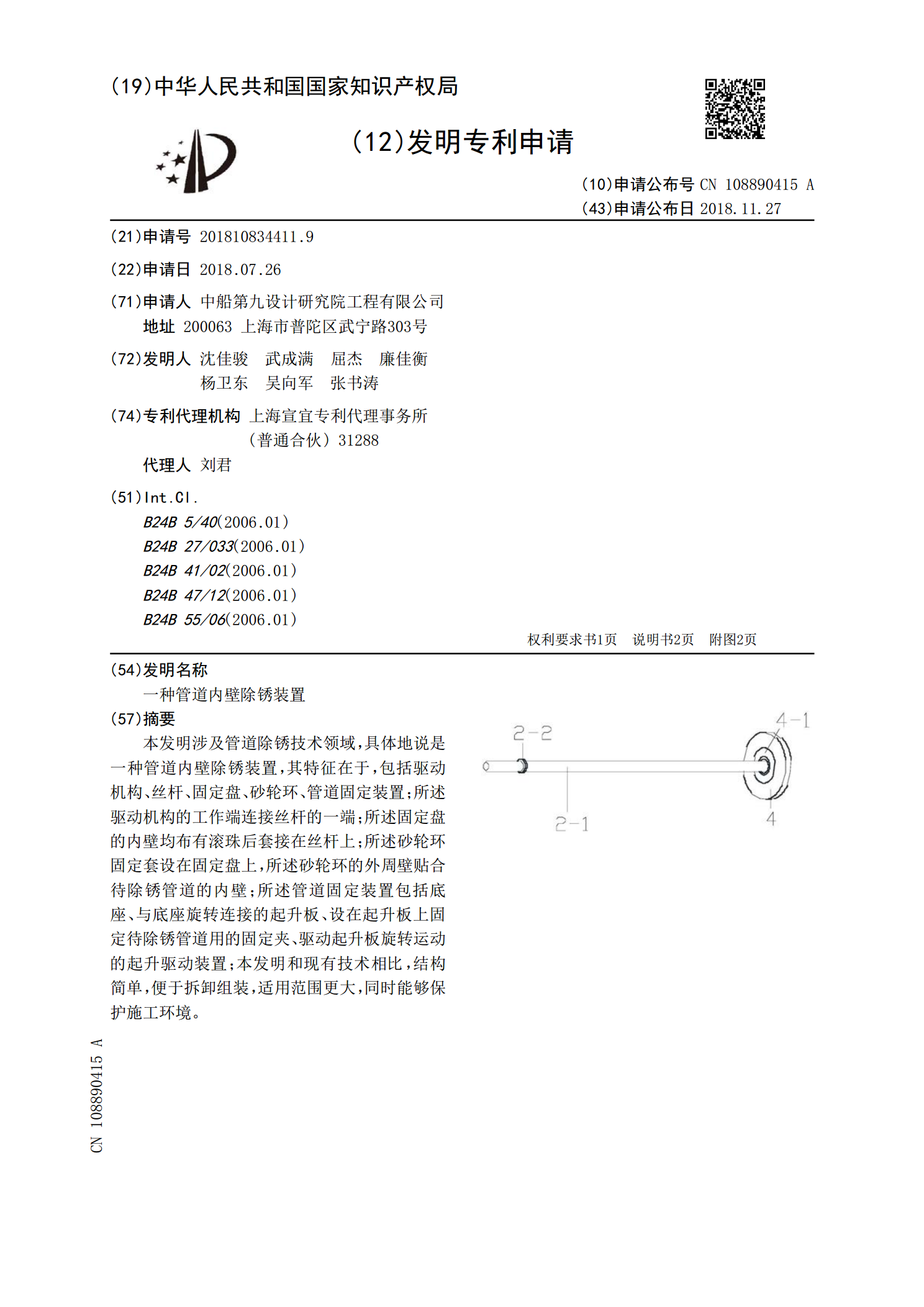
本发明涉及管道除锈技术领域,具体地说是一种管道内壁除锈装置,其特征在于,包括驱动机构、丝杆、固定盘、砂轮环、管道固定装置;所述驱动机构的工作端连接丝杆的一端;所述固定盘的内壁均布有滚珠后套接在丝杆上;所述砂轮环固定套设在固定盘上,所述砂轮环的外周壁贴合待除锈管道的内壁;所述管道固定装置包括底座、与底座旋转连接的起升板、设在起升板上固定待除锈管道用的固定夹、驱动起升板旋转运动的起升驱动装置;本发明和现有技术相比,结构简单,便于拆卸组装,适用范围更大,同时能够保护施工环境。
一种管道内壁除锈设备及其除锈方法.pdf
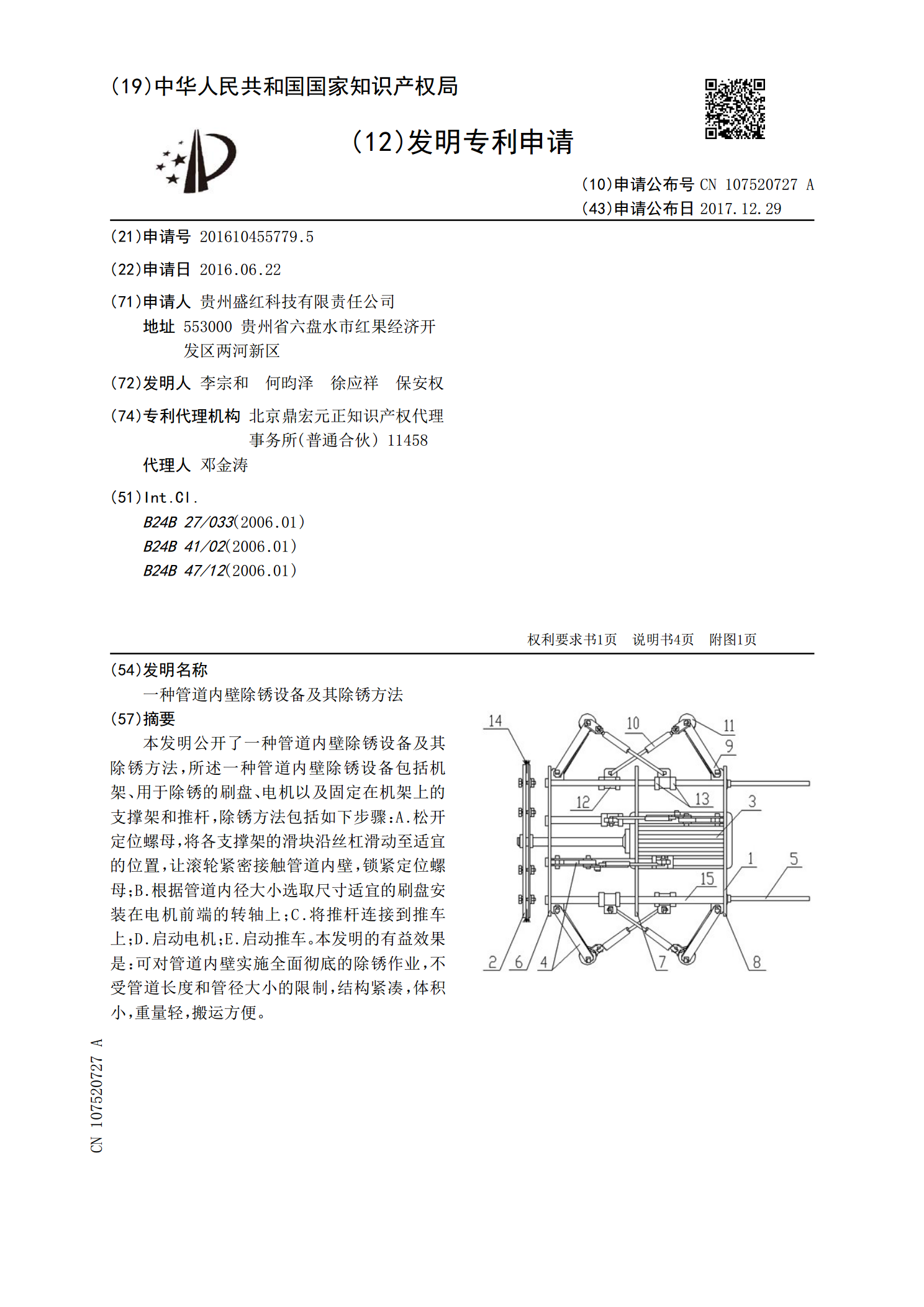
本发明公开了一种管道内壁除锈设备及其除锈方法,所述一种管道内壁除锈设备包括机架、用于除锈的刷盘、电机以及固定在机架上的支撑架和推杆,除锈方法包括如下步骤:A.松开定位螺母,将各支撑架的滑块沿丝杠滑动至适宜的位置,让滚轮紧密接触管道内壁,锁紧定位螺母;B.根据管道内径大小选取尺寸适宜的刷盘安装在电机前端的转轴上;C.将推杆连接到推车上;D.启动电机;E.启动推车。本发明的有益效果是:可对管道内壁实施全面彻底的除锈作业,不受管道长度和管径大小的限制,结构紧凑,体积小,重量轻,搬运方便。

一种用于石油管道内壁的自动除锈装置.pdf
本发明涉及一种用于石油管道内壁的自动除锈装置,包括除锈支块,所述除锈支块侧壁中部通过电机座安装有除锈电机,除锈电机的输出轴上安装除锈方轴;所述除锈支块侧壁上焊接有旋转限位槽,旋转限位槽的内部通过滑动配合连接方式均匀安装在有四根限位杆,四根限位杆的末端分别焊接在除锈方轴的四个侧壁上,四根限位杆的位置是均匀分布在旋转限位槽四周,使得四根限位杆对旋转限位槽各部的限位支撑力比较均匀,从而使得除锈电机能够稳定的带动除锈方轴转动,转动效果好;所述除锈方轴的四个侧壁上分别安装有四个除锈机构;所述除锈机构包括安装在除锈方