
电动汽车制动能量回收系统及控制方法.pdf

冬易****娘子

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

电动汽车制动能量回收系统及控制方法.pdf
本发明涉及电动汽车领域,公开了一种电动汽车制动能量回收系统及控制方法,其中,所述电动汽车制动能量回收系统包括行星齿轮组件、驱动电机、能量转换部件以及蓄能器,所述星齿轮组件包括太阳轮、行星轮、行星架以及齿圈,多个所述行星轮环绕所述太阳轮轴线与所述太阳轮外啮合,多个所述行星轮与所述行星架固定连接,并与所述齿圈内啮合;所述驱动电机的动力输出轴与所述太阳轮固定连接;所述能量转换部件与所述行星架的转轴连接,用于在所述行星架和蓄能器之间进行能量转换;所述蓄能器与所述能量转换部件连接。通过上述技术方案的设置,能够有效提
电动汽车制动能量回收系统及方法.pdf
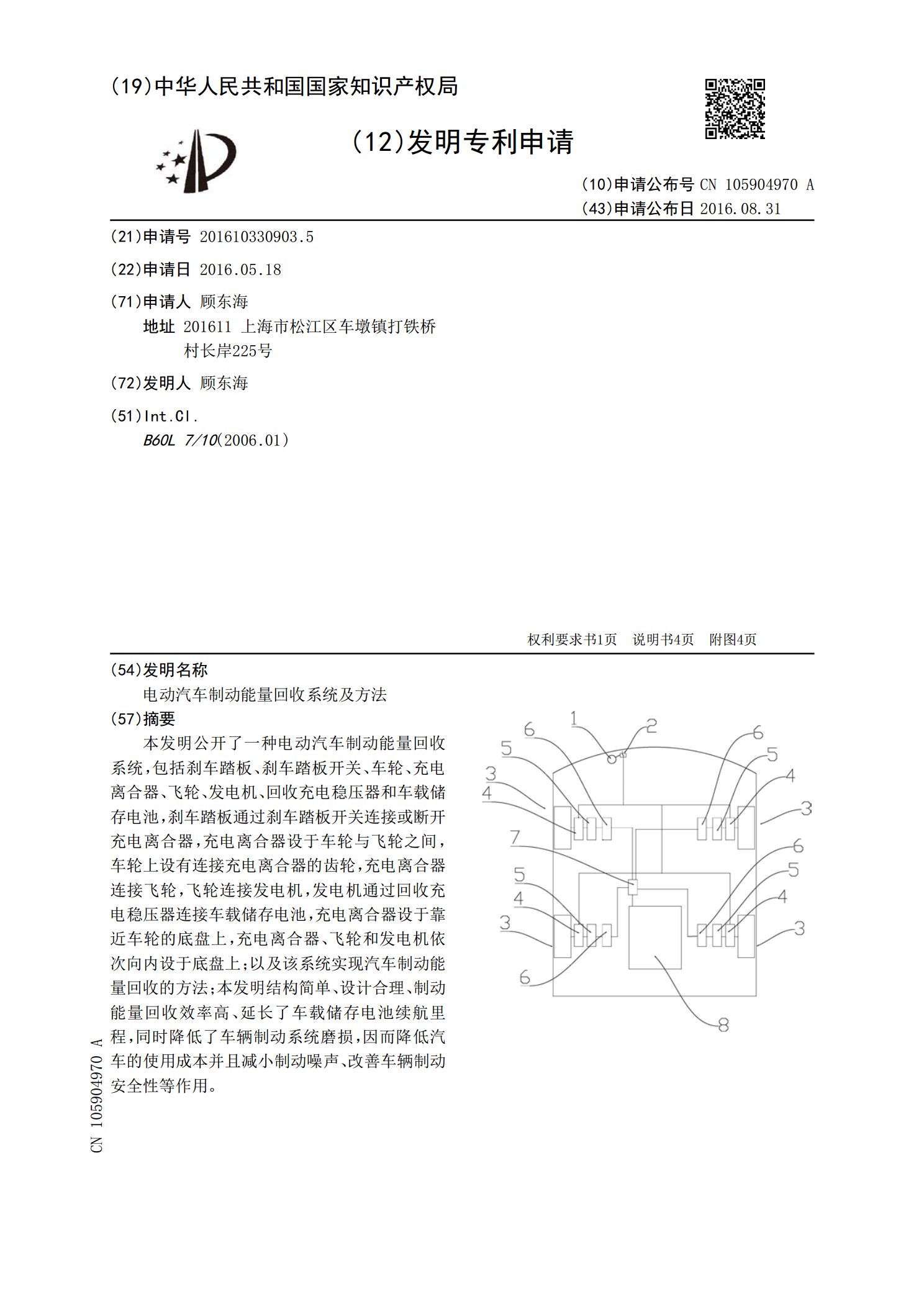
本发明公开了一种电动汽车制动能量回收系统,包括刹车踏板、刹车踏板开关、车轮、充电离合器、飞轮、发电机、回收充电稳压器和车载储存电池,刹车踏板通过刹车踏板开关连接或断开充电离合器,充电离合器设于车轮与飞轮之间,车轮上设有连接充电离合器的齿轮,充电离合器连接飞轮,飞轮连接发电机,发电机通过回收充电稳压器连接车载储存电池,充电离合器设于靠近车轮的底盘上,充电离合器、飞轮和发电机依次向内设于底盘上;以及该系统实现汽车制动能量回收的方法;本发明结构简单、设计合理、制动能量回收效率高、延长了车载储存电池续航里程,同时
轮毂电机电动汽车制动系统及制动能量回收控制方法.pdf
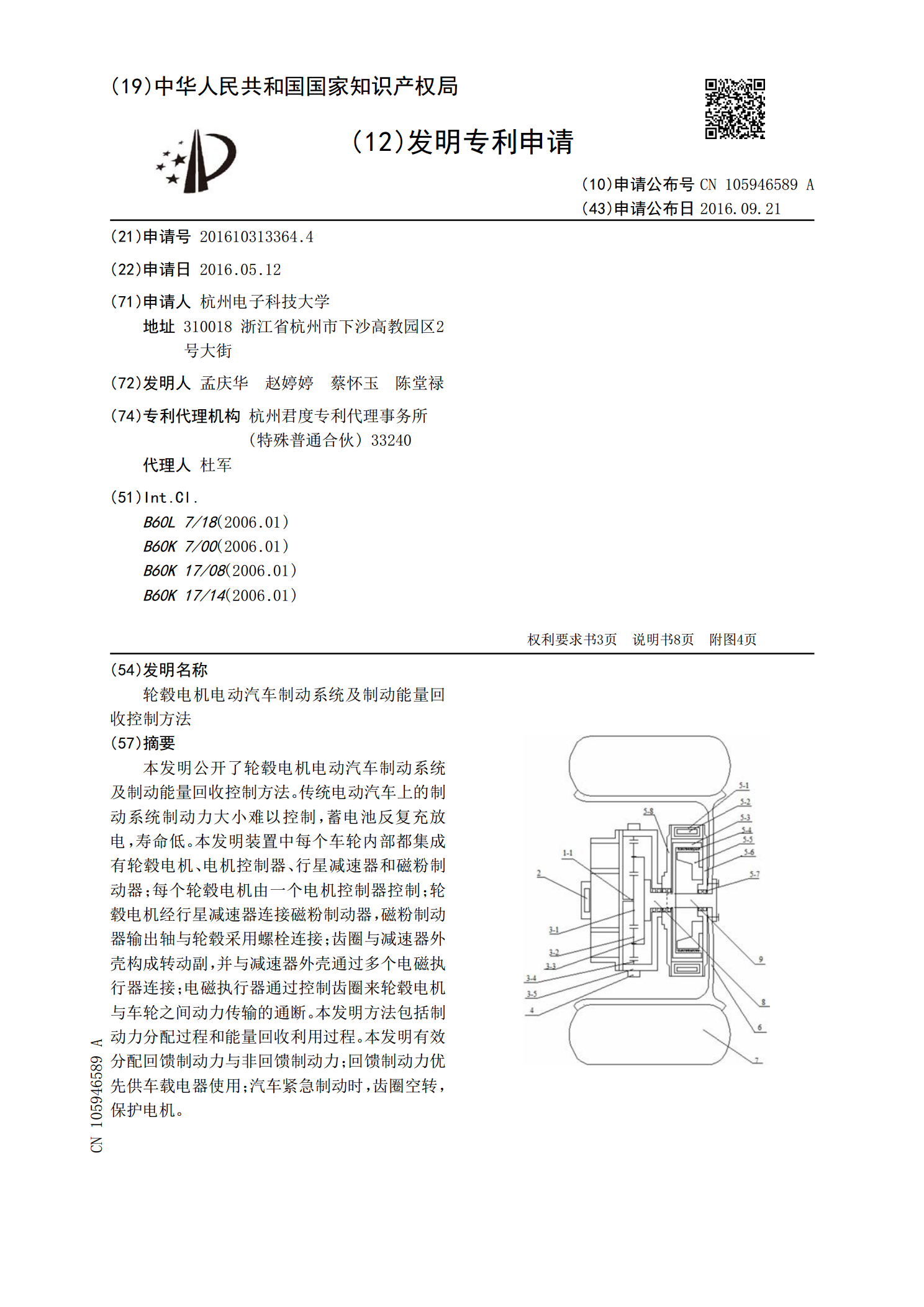
本发明公开了轮毂电机电动汽车制动系统及制动能量回收控制方法。传统电动汽车上的制动系统制动力大小难以控制,蓄电池反复充放电,寿命低。本发明装置中每个车轮内部都集成有轮毂电机、电机控制器、行星减速器和磁粉制动器;每个轮毂电机由一个电机控制器控制;轮毂电机经行星减速器连接磁粉制动器,磁粉制动器输出轴与轮毂采用螺栓连接;齿圈与减速器外壳构成转动副,并与减速器外壳通过多个电磁执行器连接;电磁执行器通过控制齿圈来轮毂电机与车轮之间动力传输的通断。本发明方法包括制动力分配过程和能量回收利用过程。本发明有效分配回馈制动力
纯电动汽车再生制动能量回收系统及控制方法.pdf
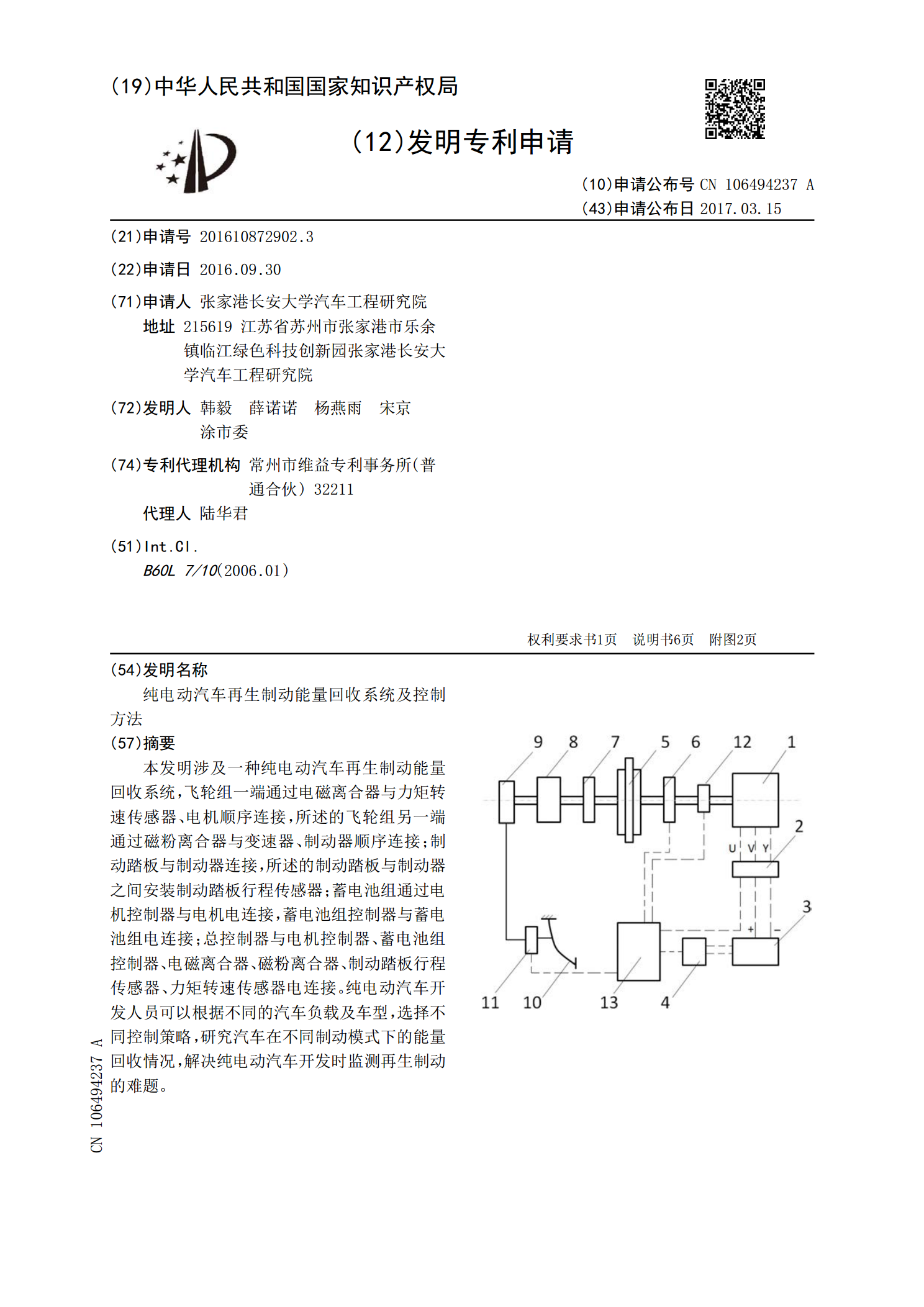
本发明涉及一种纯电动汽车再生制动能量回收系统,飞轮组一端通过电磁离合器与力矩转速传感器、电机顺序连接,所述的飞轮组另一端通过磁粉离合器与变速器、制动器顺序连接;制动踏板与制动器连接,所述的制动踏板与制动器之间安装制动踏板行程传感器;蓄电池组通过电机控制器与电机电连接,蓄电池组控制器与蓄电池组电连接;总控制器与电机控制器、蓄电池组控制器、电磁离合器、磁粉离合器、制动踏板行程传感器、力矩转速传感器电连接。纯电动汽车开发人员可以根据不同的汽车负载及车型,选择不同控制策略,研究汽车在不同制动模式下的能量回收情况,

一种电动汽车制动能量回收系统制动压力精确控制方法.pdf
本发明涉及一种电动汽车制动能量回收系统制动压力精确控制方法,其特征在于:是纯电动汽车车型再生制动与液压制动的协调,具体步骤如下:包括进油阀,出油阀,电机液压泵工作状态的确定和工作时间的确定,其提出一种轮缸制动压力精确控制的方法,有效地确定进油阀、出油阀和电机液压泵的工作状态和工作时间,实现了与电机制动力的协调配合。