
一种汽车在干性路况的脱困方法与系统.pdf

一吃****昕靓


1/8

2/8

3/8
4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种汽车在干性路况的脱困方法与系统.pdf
一种汽车在干性路况的脱困方法与系统,脱困方法包括:监测到汽车被困后,让汽车完全自由停稳;以小扭矩将驱动轮朝第一方向驱动,车轮开始转动,在驱动轮停止旋转后,逐渐加大扭矩,直到驱动轮打滑或被动轮停止转动,记录第一方向打滑扭矩,所述第一方向为前进或后退;立即转换驱动方向,以第一方向打滑扭矩的70%~100%为设定扭矩朝第二方向驱动车轮,直到驱动轮打滑或被动轮停止旋转,所述驱动方向转换操作时间应在汽车退回到完全自由停稳位置以前;监测汽车是否脱困,若否,则立即转换驱动方向,以前述设定扭矩再驱动车轮;若是,则汽车完成
一种汽车泥陷脱困装置及方法.pdf
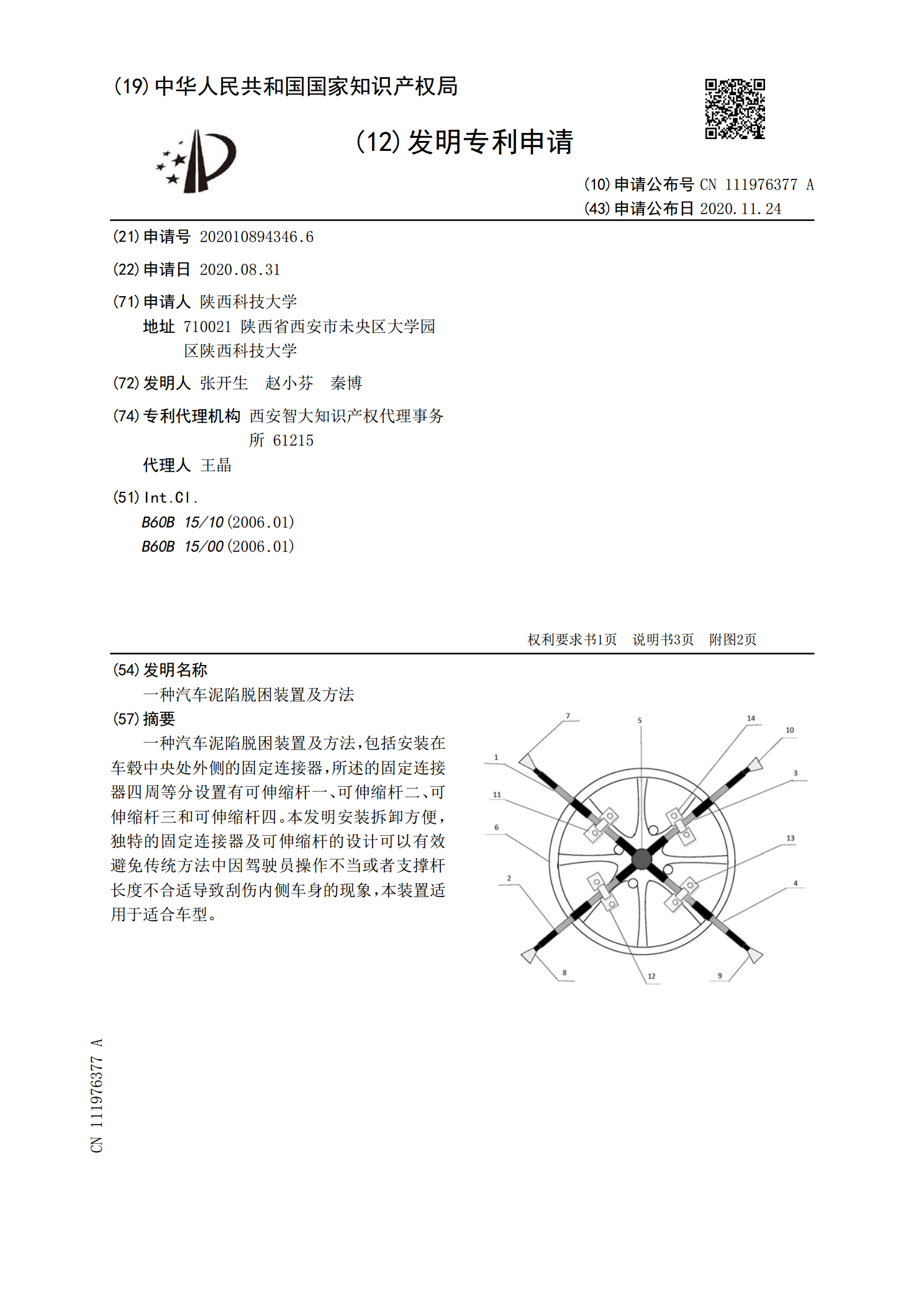
一种汽车泥陷脱困装置及方法,包括安装在车毂中央处外侧的固定连接器,所述的固定连接器四周等分设置有可伸缩杆一、可伸缩杆二、可伸缩杆三和可伸缩杆四。本发明安装拆卸方便,独特的固定连接器及可伸缩杆的设计可以有效避免传统方法中因驾驶员操作不当或者支撑杆长度不合适导致刮伤内侧车身的现象,本装置适用于适合车型。

一种适应多种路况的汽车ABS控制方法.pdf
本发明请求保护一种适应多种路面情况的汽车防抱死制动系统(ABS)控制方法,涉及汽车电子控制技术领域。该方法将ABS的控制过程分为首次控制循环和常规控制循环,在首次控制循环时,利用轮速差来辨识路面,在常规控制循环,利用轮速峰值斜率、减压段中的轮速降值和增压次数来辨识路面。针对对开路面,两个前轮采用修正的低选控制,两个后轮根据辨识出的所处路面采用相应路面的控制策略进行独立控制,针对单一的高附着和低附着路面,前轮采用增压同步控制,后轮采用单一路面的控制方法。根据车辆附着路面采用相应路面的控制策略。该方法可解决汽

一种组合模块式汽车路况模拟测试系统.pdf
本发明涉及一种组合模块式汽车路况模拟测试系统,包括上坡道模块、平台模块、下坡道模块,平台模块包括滑辊式车轮打滑模拟测试模块、过渡调节模块,上坡道模块、平台模块、下坡道模块通过模块连接组件依次固定连接,滑辊式车轮打滑模拟测试模块、过渡调节模块通过模块连接组件固定连接,模块连接组件包括把手连杆组件、连接凹块,把手连杆组件包括连接件把手、连接拉杆。本发明采用组合模块式方案将多个模拟测试模块组合成完整的模拟测试系统,具有模拟测试操作效率高,成本低的特点。
一种汽车脱困装置.pdf
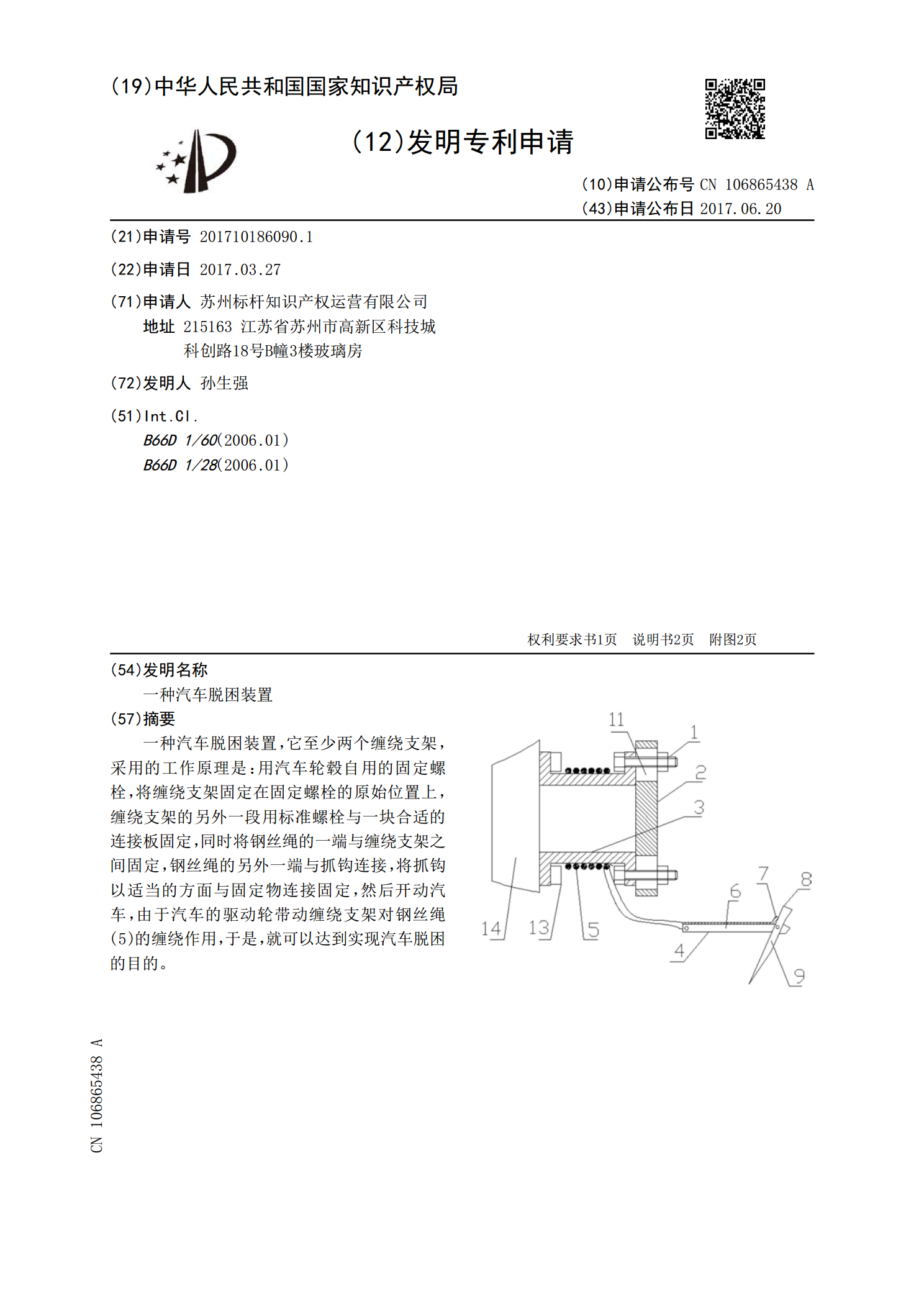
一种汽车脱困装置,它至少两个缠绕支架,采用的工作原理是:用汽车轮毂自用的固定螺栓,将缠绕支架固定在固定螺栓的原始位置上,缠绕支架的另外一段用标准螺栓与一块合适的连接板固定,同时将钢丝绳的一端与缠绕支架之间固定,钢丝绳的另外一端与抓钩连接,将抓钩以适当的方面与固定物连接固定,然后开动汽车,由于汽车的驱动轮带动缠绕支架对钢丝绳(5)的缠绕作用,于是,就可以达到实现汽车脱困的目的。