
转运车及轨道巡检机器人转运系统.pdf

一条****丹淑


1/10
2/10
3/10

4/10

5/10

6/10
7/10

8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

转运车及轨道巡检机器人转运系统.pdf
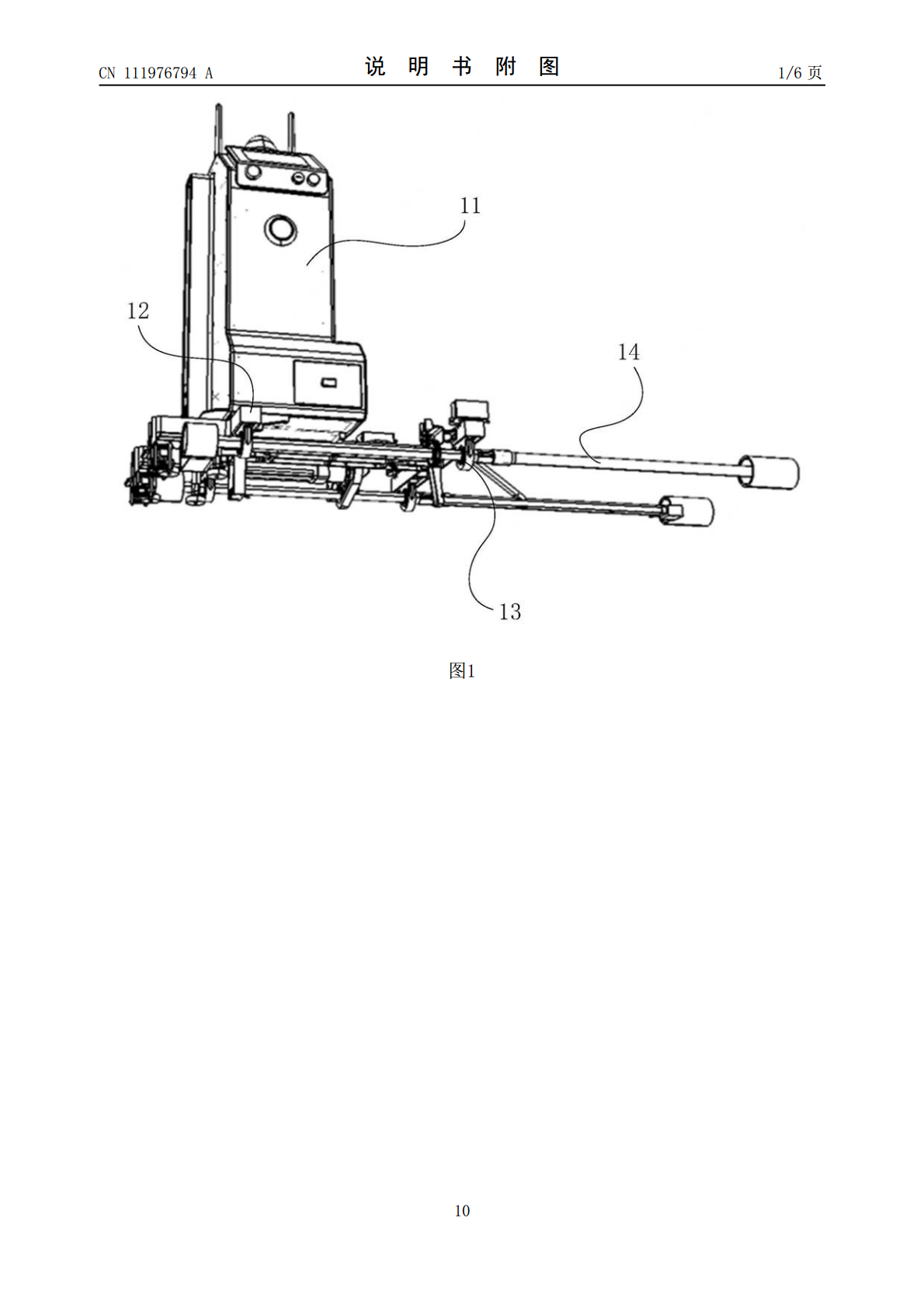
本发明实施例提供一种转运车及轨道巡检机器人转运系统。本发明实施例提供的转运车,包括:框架;其中,所述框架下方设置有滚动轮组;所述框架上分布设置有支撑座,所述支撑座用于支撑轨道巡检机器人,以悬置所述轨道巡检机器人上用于检测轨道内侧的检测传感器。本发明实施例提供的转运车,通过在框架结构上方设置支撑座,以对放置于上方的轨道巡检机器人进行悬置,从而使得轨道巡检机器人整体都能够脱离地面,再借助在框架结构下方设置滚动轮组的方式,以实现对轨道巡检机器人的转运操作。

一种转运堆垛车及使用该转运堆垛车的转运堆垛系统.pdf
本发明提供了一种转运堆垛车及使用该转运堆垛车的转运堆垛系统,转运堆垛车包括车架和前后导向安装在车架上的门架,车架上设有车架导向结构,门架上设有门架导向结构,车架上还设有驱动门架前后移动的前后驱动机构,门架上设有货叉及驱动货叉上下移动的上下驱动机构,门架导向结构包括在门架向前移动时伸出车架的伸出部分以及仍与车架导向结构导向配合的留置部分,伸出部分用于支撑于货物支撑装置上,以在货叉叉取货物支撑装置上的货物或者向货物支撑装置上堆垛货物时与留置部分配合共同支撑门架。有益效果:伸出部分和留置部分配合提供稳定的支撑,
转运轨道.pdf
本发明提供了一种转运轨道,包括上游固定轨道及与该上游固定轨道构成衔接或分离配合的过渡轨道,上游固定轨道的出料端有上游限位单元,上游限位单元限制上游固定轨道上的小车的滚轮向过渡轨道上位移,所述的上游固定轨道与过渡轨道衔接配合时两者之间构成上游限位单元的限位解除机构并驱动上游限位单元转位至小车的滚轮滚动路径的避让位。上述方案中,在保证小车能够正常转运的同时,有效防止轨道分离时小车从上游固定轨道的衔接端脱离,提升了安全性。
用于转运换流变压器的轨道小车及转运系统.pdf
本发明公开一种用于转运换流变压器的轨道小车及转运系统,涉及电网运行检修技术领域,为解决对换流变压器进行转运时的平稳性较差的问题。所述轨道小车包括:至少两组车轮组件,每组车轮组件包括支撑架、轮轴和两个车轮,轮轴与支撑架连接,且轮轴位于支撑架的下方,车轮安装在轮轴上,车轮与轮轴之间设有轴承;车架,车架位于支撑架的上方,且车架与支撑架连接;缓冲件,缓冲件位于车架与支撑架之间,且缓冲件分别与车架和支撑架连接。由于在支撑架与车架之间设置有缓冲件,缓冲件吸收振动,减小了传递至车架的振动,改善对换流变压器进行转运时的平

转运车液压称重系统.pdf
本发明涉及转运车液压称重系统,包括称重模块、支腿油缸、控制显示模块,称重模块与控制显示模块之间数据连接,称重模块设置在转运车货箱下部,支腿油缸与称重模块连接,并设置在称重模块与地面之间。转运车开始装载称重时,支腿油缸先伸出,把转运车支起来,直至轮胎离开地面,只有支腿油缸支撑称重模块,使得整个转运车的荷载都在称重模块上,支腿油缸与称重模块构成组件配套设置,一般在转运车上设置四个上述组件,货箱前后各设置两个;随着货物装卸,转运车的质量不断发生变化,控制显示模块将重量的变化及时显示出来。当装载或卸货完成后,转运