
点云标注方法、装置及系统.pdf

永香****能手


1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共24页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
点云标注方法、装置及系统.pdf
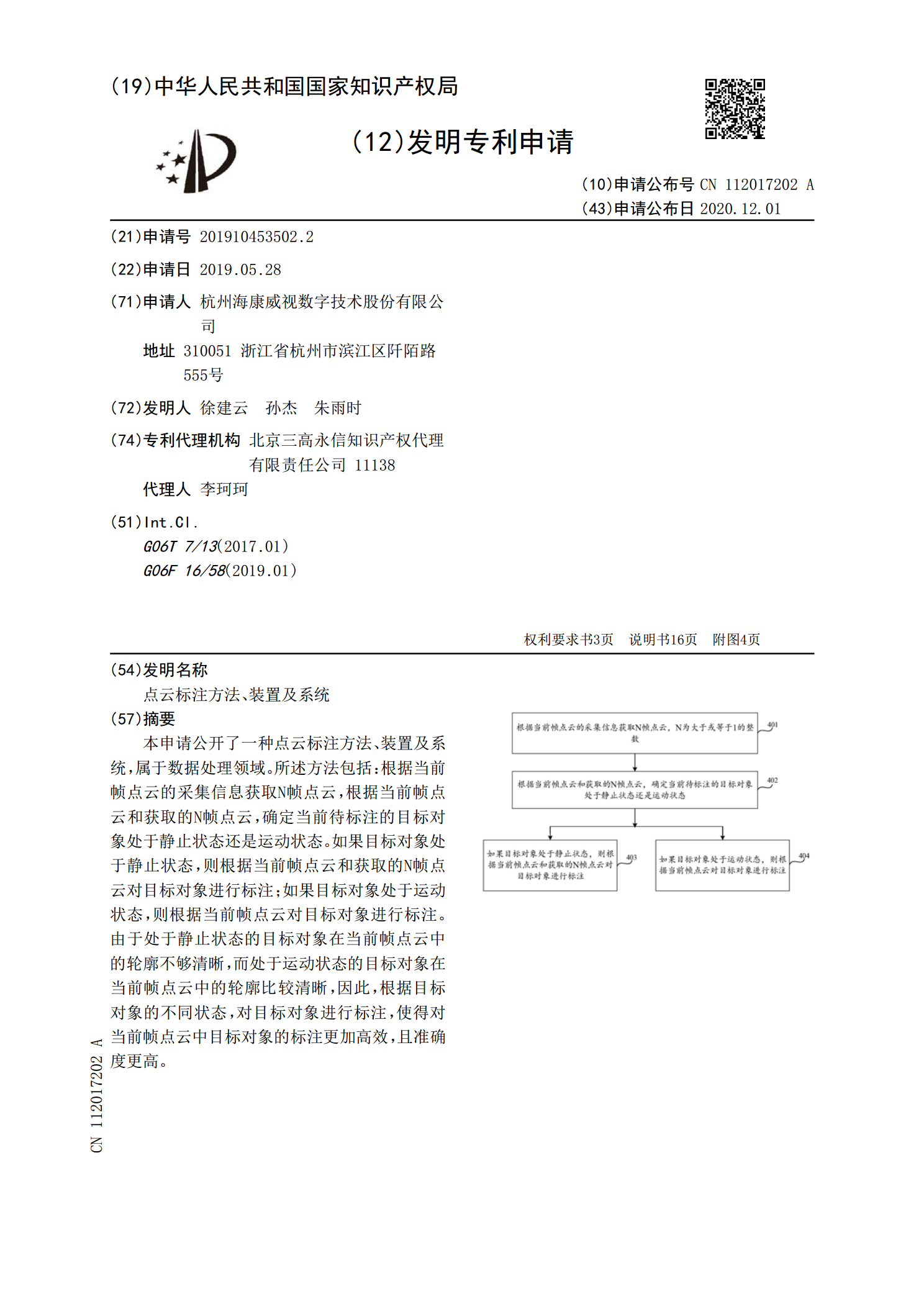
本申请公开了一种点云标注方法、装置及系统,属于数据处理领域。所述方法包括:根据当前帧点云的采集信息获取N帧点云,根据当前帧点云和获取的N帧点云,确定当前待标注的目标对象处于静止状态还是运动状态。如果目标对象处于静止状态,则根据当前帧点云和获取的N帧点云对目标对象进行标注;如果目标对象处于运动状态,则根据当前帧点云对目标对象进行标注。由于处于静止状态的目标对象在当前帧点云中的轮廓不够清晰,而处于运动状态的目标对象在当前帧点云中的轮廓比较清晰,因此,根据目标对象的不同状态,对目标对象进行标注,使得对当前帧点云
点云数据的标注方法、装置及终端设备.pdf
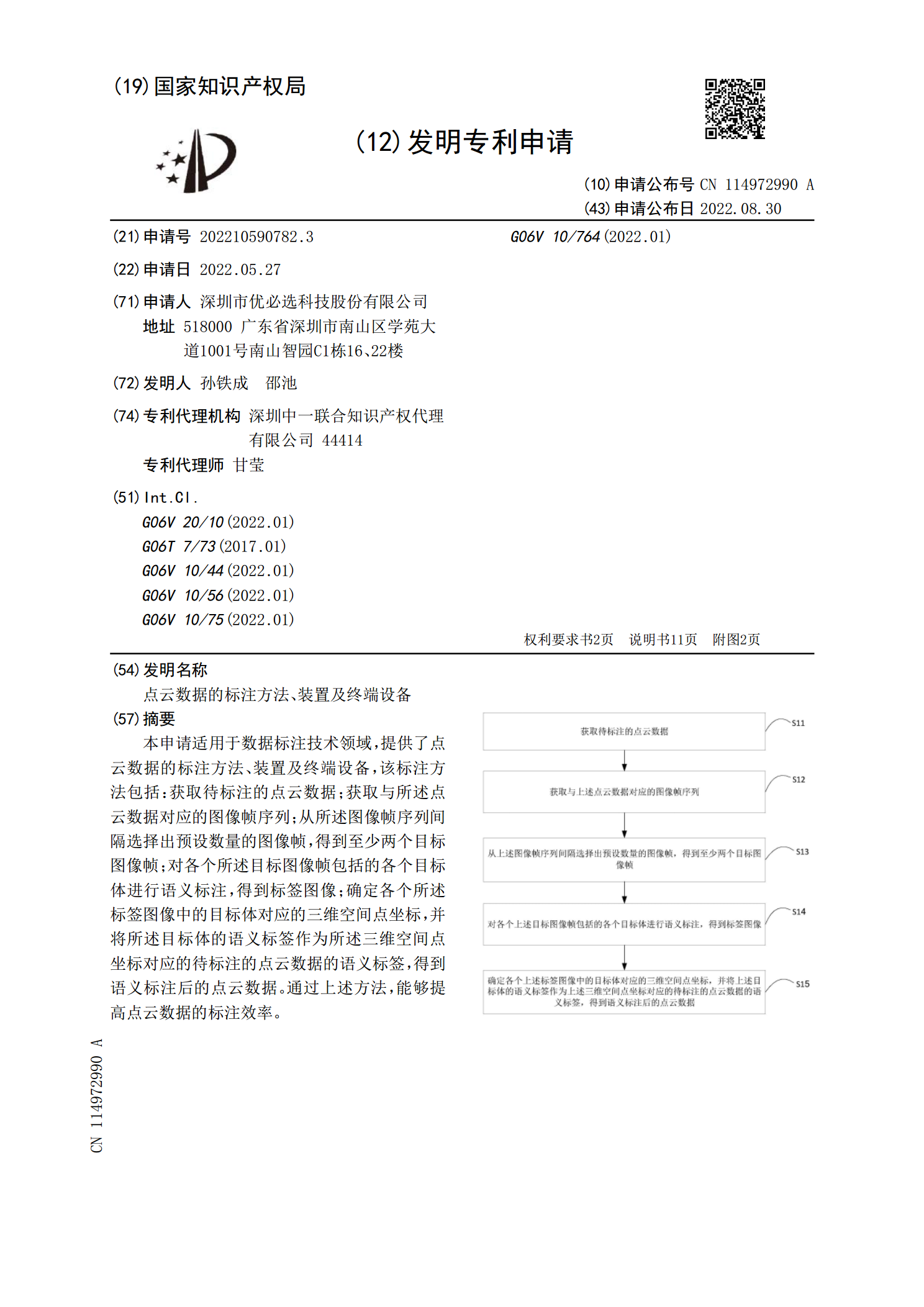
本申请适用于数据标注技术领域,提供了点云数据的标注方法、装置及终端设备,该标注方法包括:获取待标注的点云数据;获取与所述点云数据对应的图像帧序列;从所述图像帧序列间隔选择出预设数量的图像帧,得到至少两个目标图像帧;对各个所述目标图像帧包括的各个目标体进行语义标注,得到标签图像;确定各个所述标签图像中的目标体对应的三维空间点坐标,并将所述目标体的语义标签作为所述三维空间点坐标对应的待标注的点云数据的语义标签,得到语义标注后的点云数据。通过上述方法,能够提高点云数据的标注效率。

点云标注方法、装置、存储介质及电子设备.pdf
本发明公开了一种点云标注方法、装置、存储介质及电子设备,该方法包括:检测待标注物的起点位置与终点位置;基于所述起点位置与所述终点位置,生成包含有待标注物的点云的第一标注框;对所述第一标注框的表面进行渲染;对渲染后的所述第一标注框进行大小调整,得到第二标注框。本发明实施例可以对标注框的表面进行着色渲染,使得渲染后的标注框中的点云在视觉效果中也是有颜色的,从而避免通过遍历点云的方式来渲染,在算力限制或计算机硬件能力不足的情况下,也能够在标注操作完成时立即同步完成渲染的变化,进而提高标注人员的标注速度。
点云数据标注方法、装置、存储介质和计算机设备.pdf
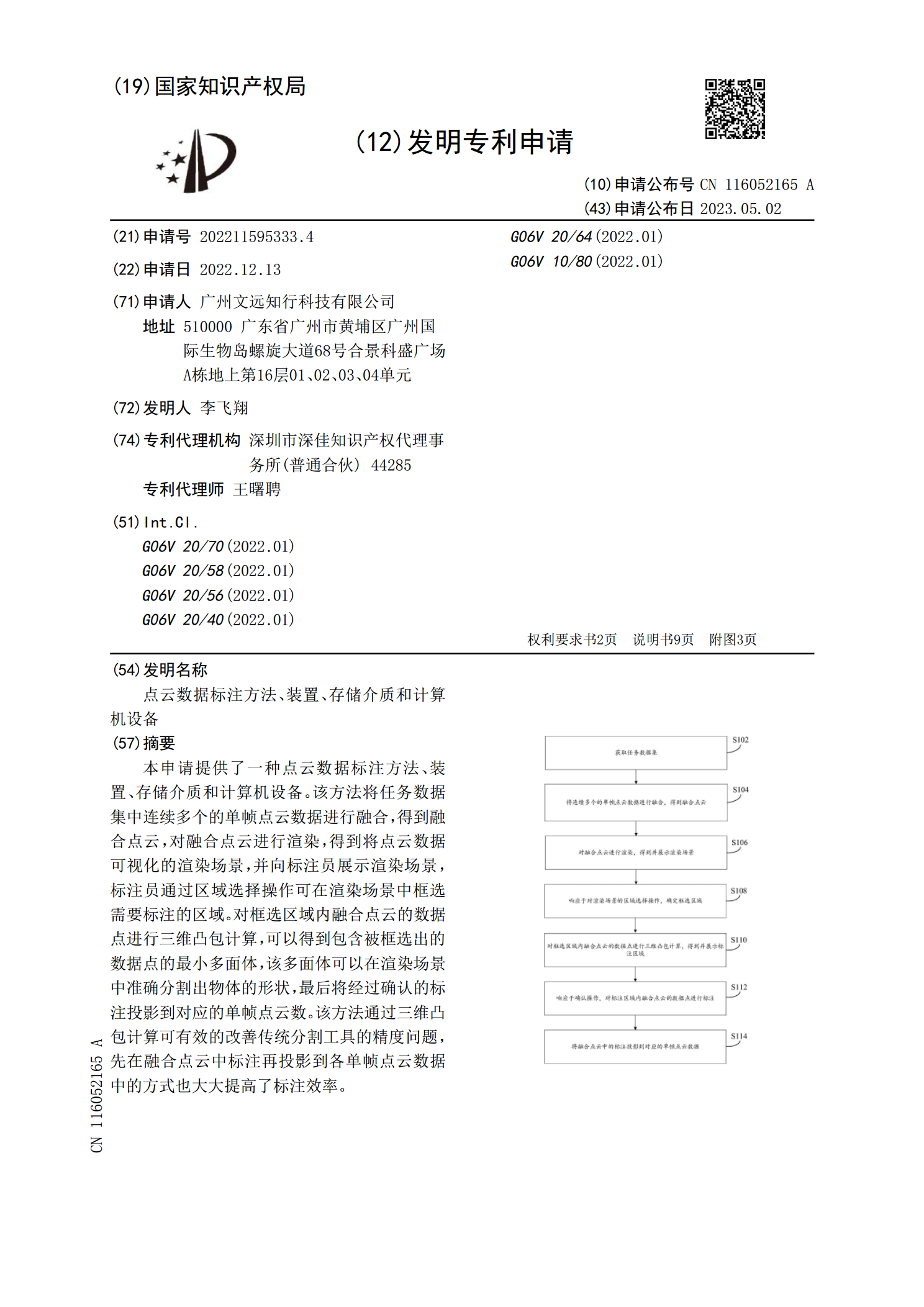
本申请提供了一种点云数据标注方法、装置、存储介质和计算机设备。该方法将任务数据集中连续多个的单帧点云数据进行融合,得到融合点云,对融合点云进行渲染,得到将点云数据可视化的渲染场景,并向标注员展示渲染场景,标注员通过区域选择操作可在渲染场景中框选需要标注的区域。对框选区域内融合点云的数据点进行三维凸包计算,可以得到包含被框选出的数据点的最小多面体,该多面体可以在渲染场景中准确分割出物体的形状,最后将经过确认的标注投影到对应的单帧点云数。该方法通过三维凸包计算可有效的改善传统分割工具的精度问题,先在融合点云中

细胞标注方法、系统和装置.pdf
本发明公开了一种细胞标注方法、系统和装置。其中,该方法包括:显示数字病理切片图像,其中,数字病理切片图像包含多个细胞;接收框选指令,其中,框选指令用于在数字病理切片图像上确定一个框选区域,框选区域内包含数字病理切片图像上待标注的一个或多个细胞;根据框选指令,生成框选区域内每个细胞的形状轮廓;接收对任意一个形状轮廓内的细胞添加的标注信息。本发明实现了动态展现数据标记结果,以增强用户等待数据输出过程中的用户体验的技术效果。