
一种目标车辆矢量轨迹追踪和工程视图建模方法、装置.pdf

文光****iu

1/10
2/10

3/10
4/10
5/10

6/10

7/10
8/10
9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种目标车辆矢量轨迹追踪和工程视图建模方法、装置.pdf
本发明公开了一种目标车辆矢量轨迹追踪和工程视图建模方法、装置。包括:对采集的连续视频帧进行目标工程车辆的检测和定位,获取各视频帧中目标工程车辆所在的目标区域的步骤;对各视频帧中获取的目标区域进行滤波预处理的步骤;确定滤波后的各目标区域的车身主轮廓及追踪点的步骤;车身方向矢量和运动方向矢量标定的步骤;对运动方向矢量轨迹进行定点跟踪的步骤;将目标工程车辆的碾压轨迹面在平面空间内进行复现的步骤和工程视图建模的步骤。本发明提供了一种便于对工程车辆矢量轨迹跟踪、碾压面复现和便于统计碾压遍数的方案,方案高效、实用、客

一种基于CNN的车辆识别和轨迹追踪方法.pdf
本发明公开了一种基于CNN的车辆识别和轨迹追踪方法,首先是通过对视频帧进行轮廓识别,筛选出车辆候选目标区域,将这些候选区域输入到预先训练好的卷积神经网络中进行车辆和非车辆目标的分类识别,在获取车辆坐标后,绘制车辆的轨迹信息,并按车道提取车辆的轨迹信息。本发明克服了现有技术存在的缺陷,提高了车辆目标识别的准确性和实时性。
无人船轨迹追踪控制方法和装置.pdf
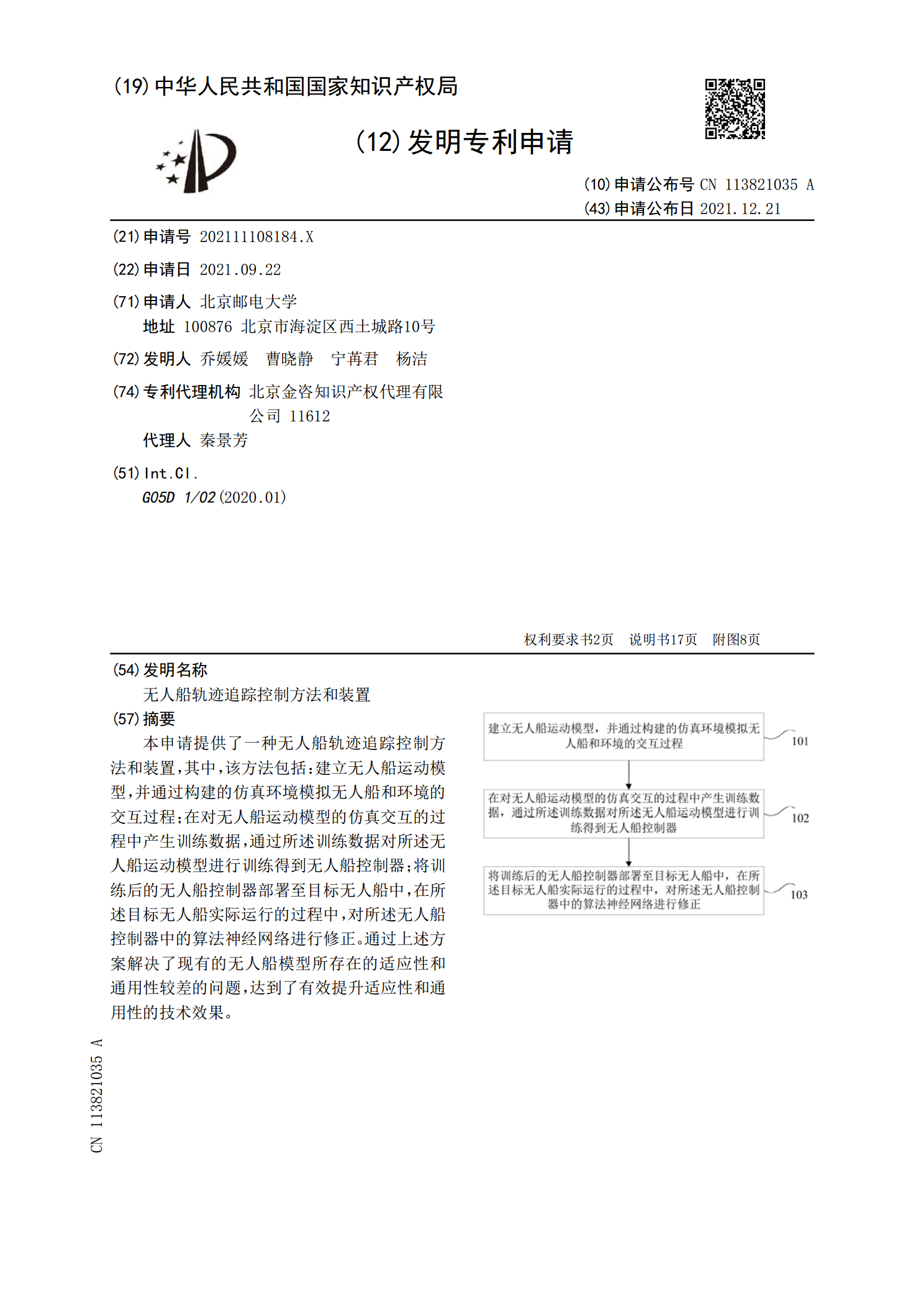
本申请提供了一种无人船轨迹追踪控制方法和装置,其中,该方法包括:建立无人船运动模型,并通过构建的仿真环境模拟无人船和环境的交互过程;在对无人船运动模型的仿真交互的过程中产生训练数据,通过所述训练数据对所述无人船运动模型进行训练得到无人船控制器;将训练后的无人船控制器部署至目标无人船中,在所述目标无人船实际运行的过程中,对所述无人船控制器中的算法神经网络进行修正。通过上述方案解决了现有的无人船模型所存在的适应性和通用性较差的问题,达到了有效提升适应性和通用性的技术效果。

轨迹追踪方法、装置及系统.pdf
本公开是关于一种轨迹追踪方法、装置及系统。该方法应用于第一跟随终端,包括:获取目标轨迹图;获取所述第一跟随终端的当前位置;确定所述目标轨迹图上的参考位置与所述第一跟随终端的当前位置之间的距离是否大于或等于第一预设阈值;若所述参考位置与所述当前位置之间的距离大于或等于第一预设阈值,展示第一提示信息。该技术方案中,若行进过程中跟随用户无法通过查看目标轨迹图修正行进路线时,第一跟随终端可以实时确定当前位置与目标路线的偏移程度,并在偏移较大时显示第一提示信息,便于跟随用户及时调整路线,提高了用户出行的安全性,进而

一种车辆轨迹确定方法和相关装置.pdf
本申请实施例公开了一种车辆轨迹确定方法和相关装置,处理设备可以获取目标时段内目标车辆对应的行驶参数,然后根据该行驶参数,确定目标车辆在该目标时段内对应的驾驶行为,并确定该驾驶行为对应的轨迹确定参数,该轨迹确定参数能够体现出该驾驶行为所对应的行驶情况。在根据该轨迹确定参数确定目标车辆在目标时段内的行驶轨迹后,可以使该行驶轨迹能够准确反映出目标车辆的驾驶者在目标时段中所进行的驾驶行为,从而能够使该行驶轨迹更加贴合目标车辆的实际行驶状况,提高行驶轨迹的准确度和合理性。