
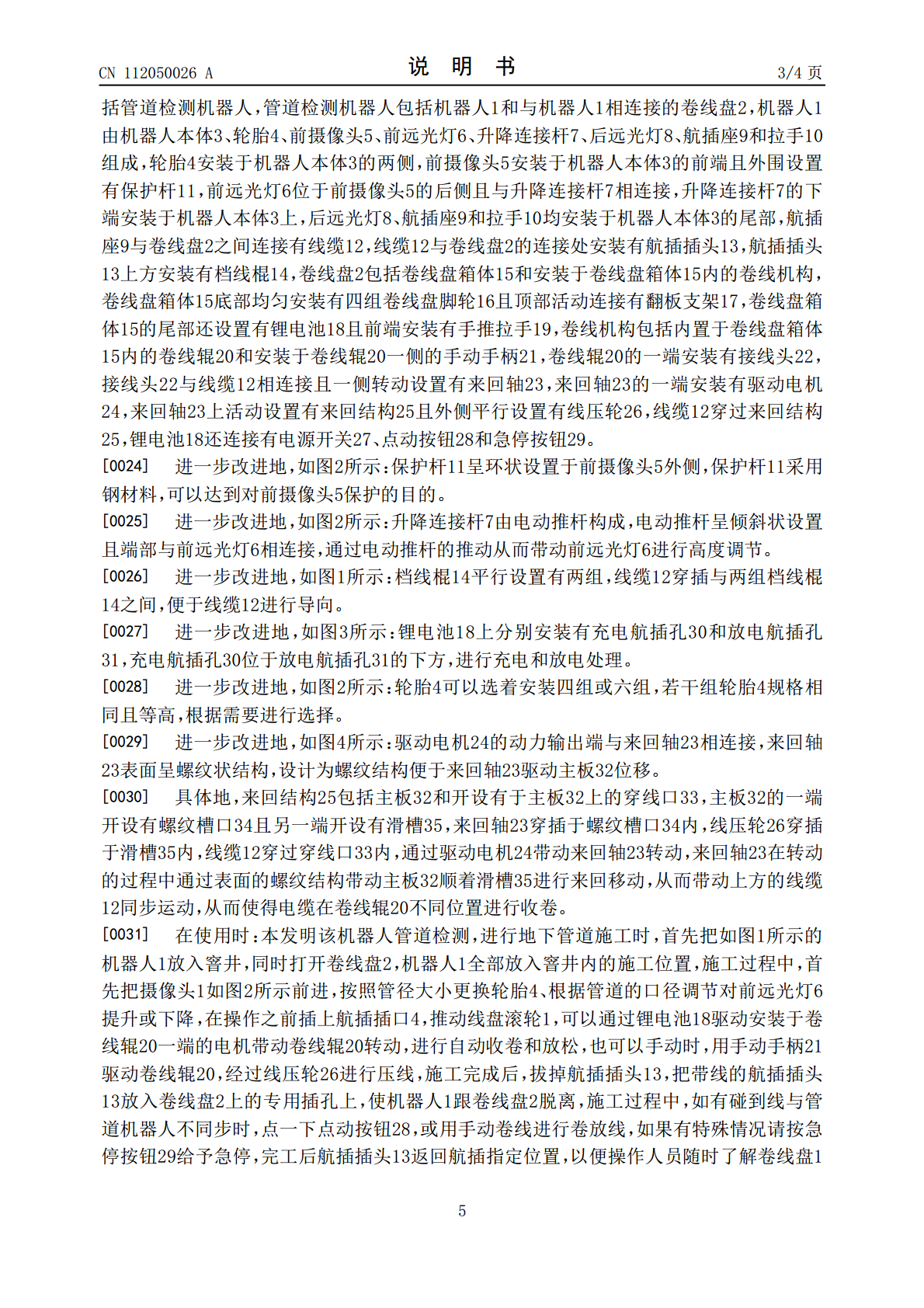
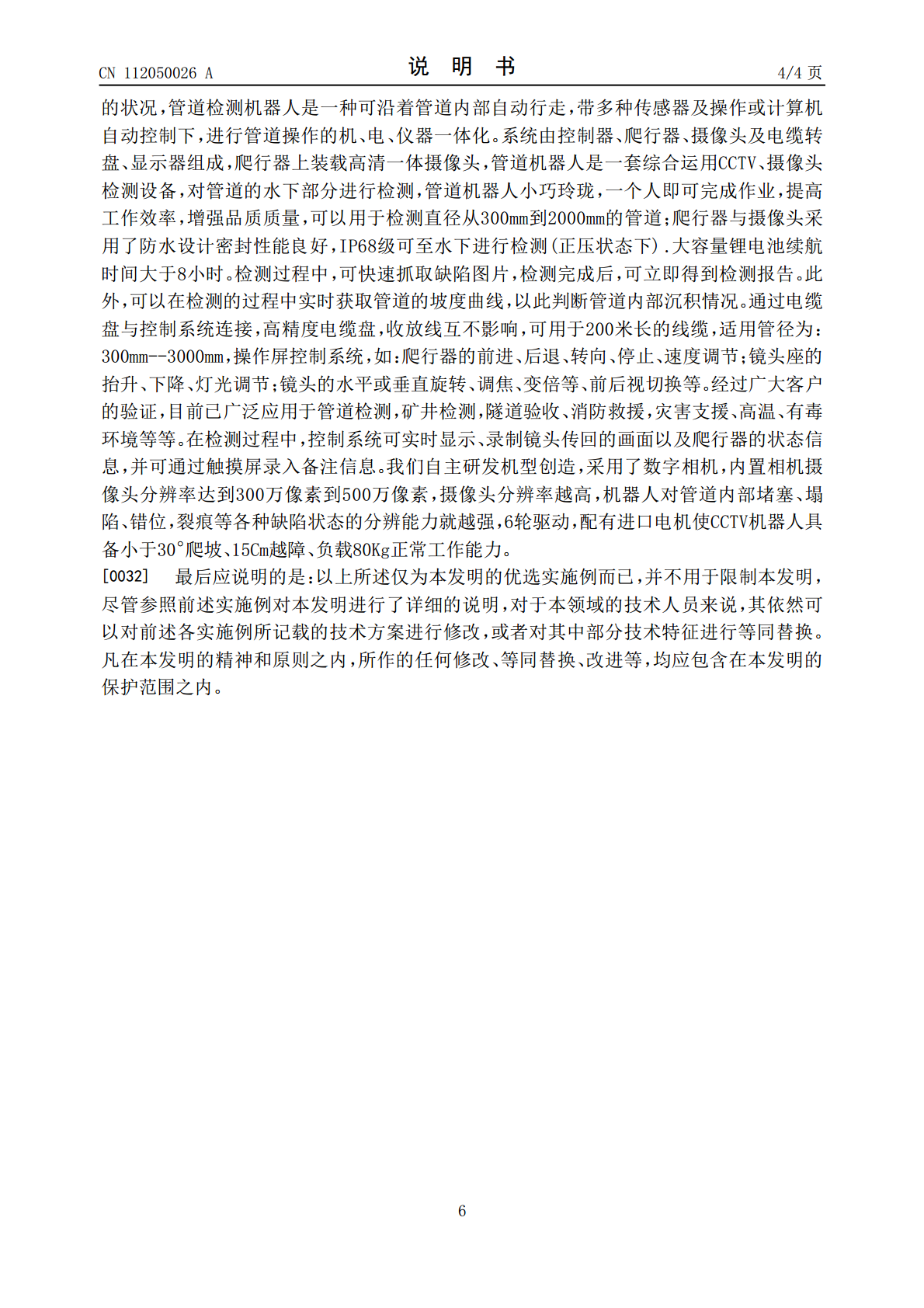
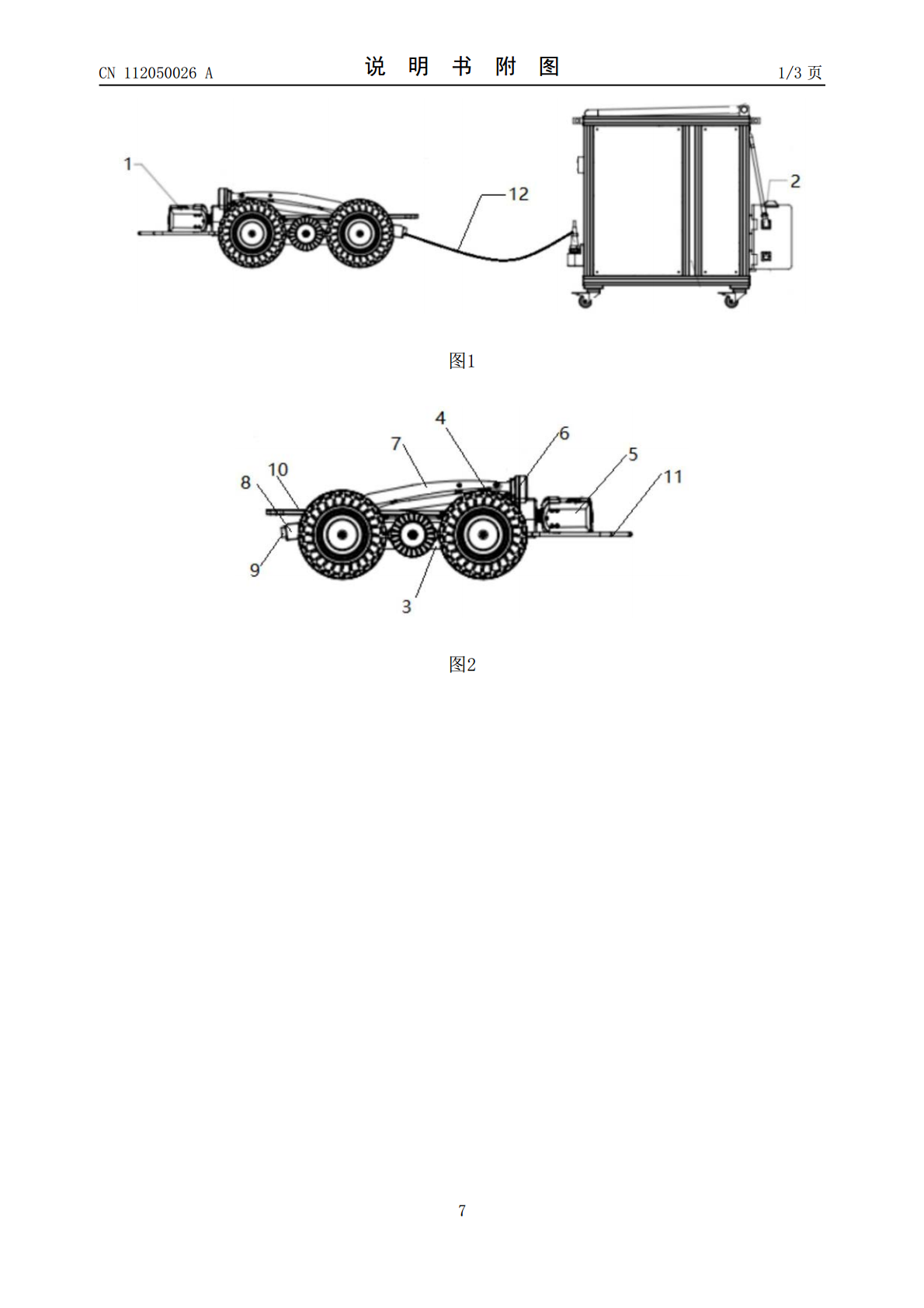
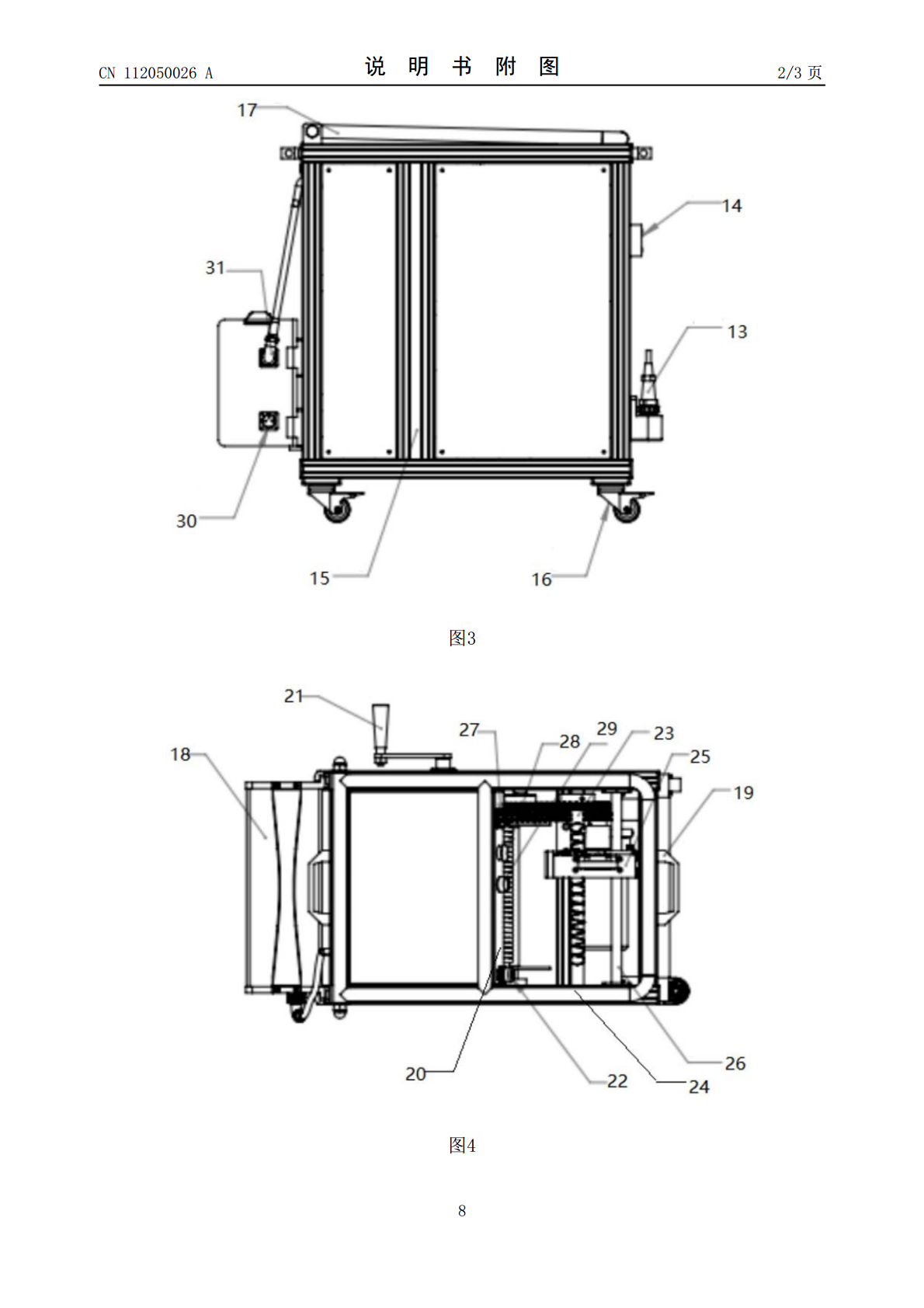
一种用于城市地下管道检测机器人.pdf

朋兴****en

1/9
2/9
3/9
4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种用于城市地下管道检测机器人.pdf
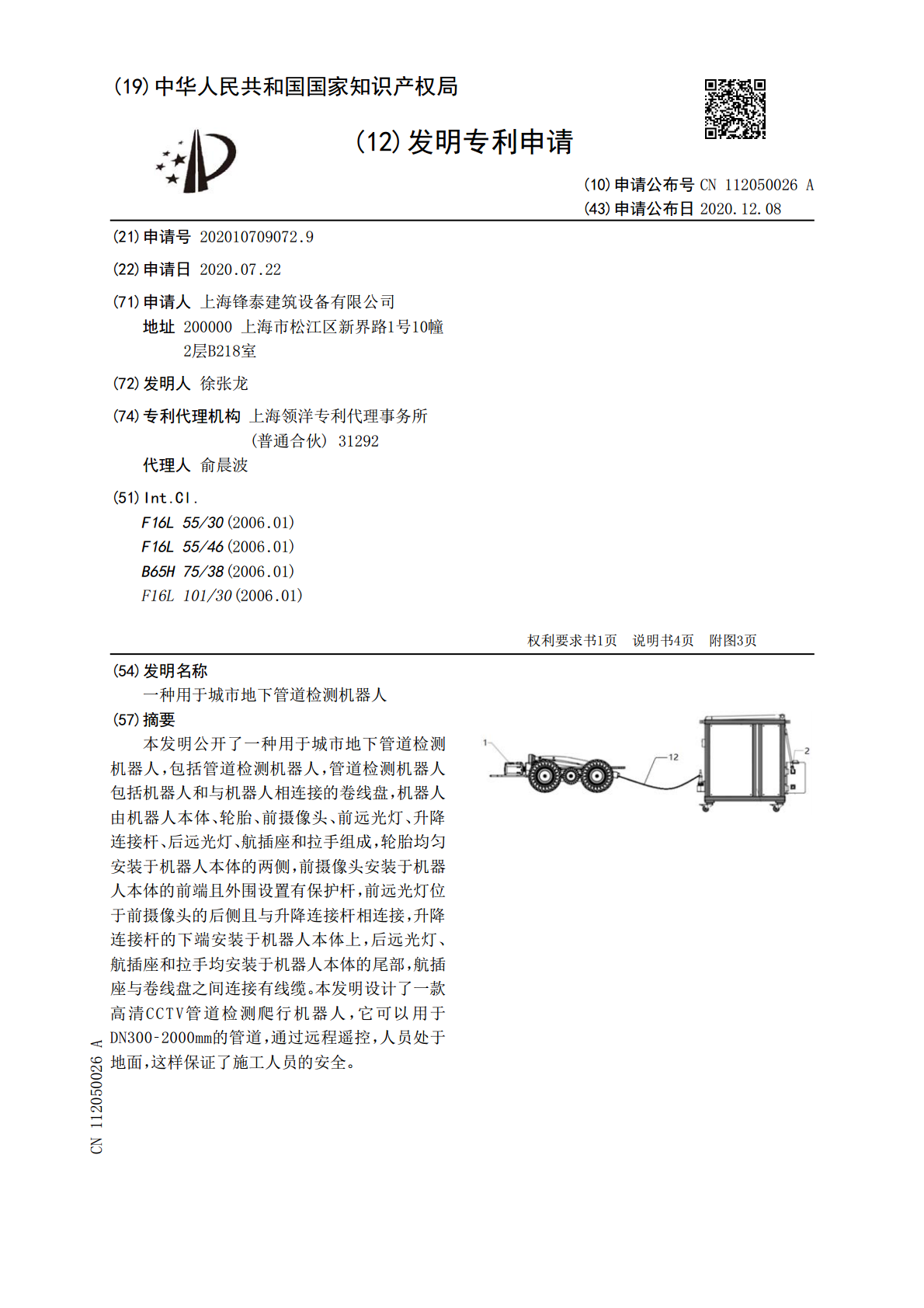
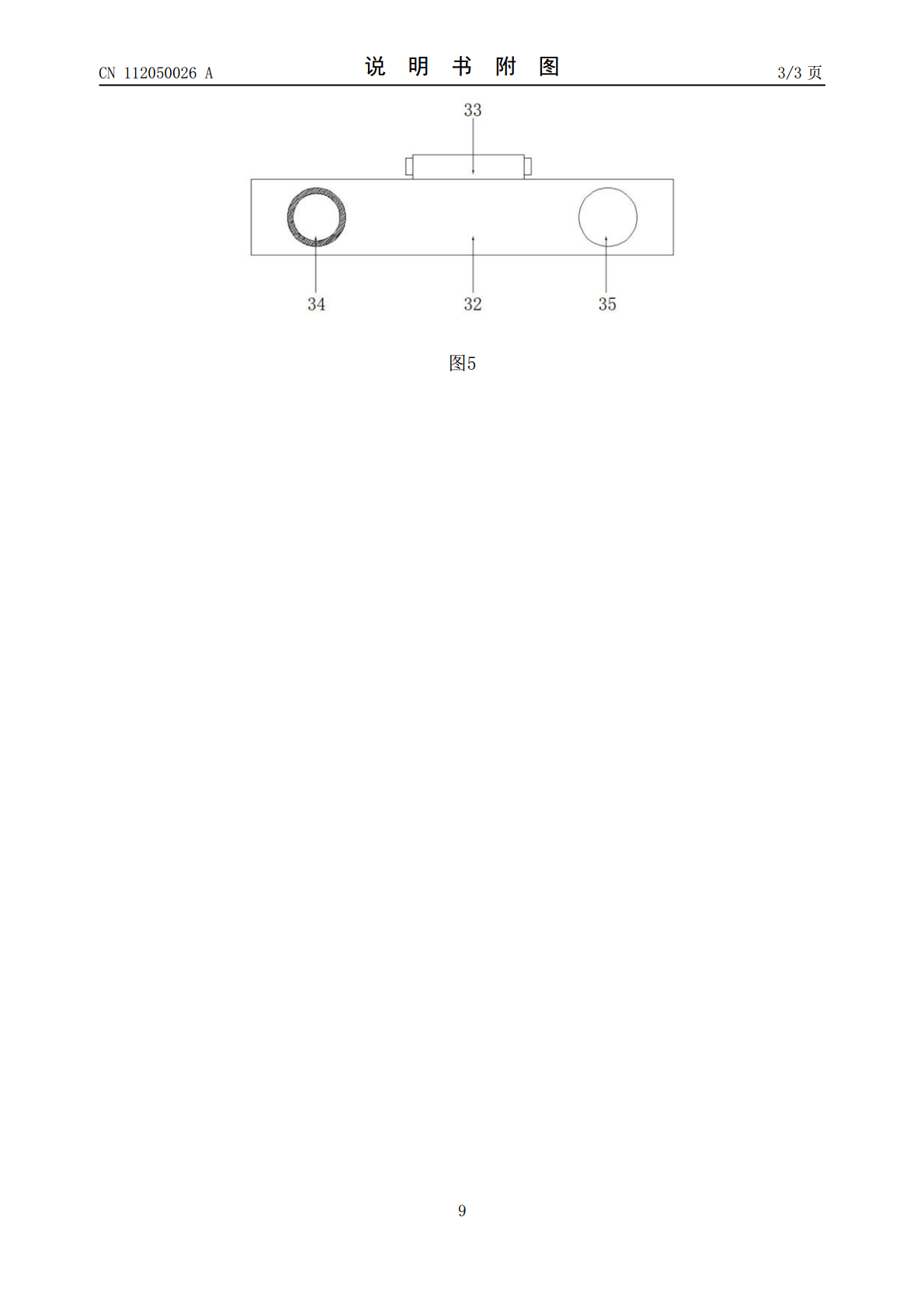
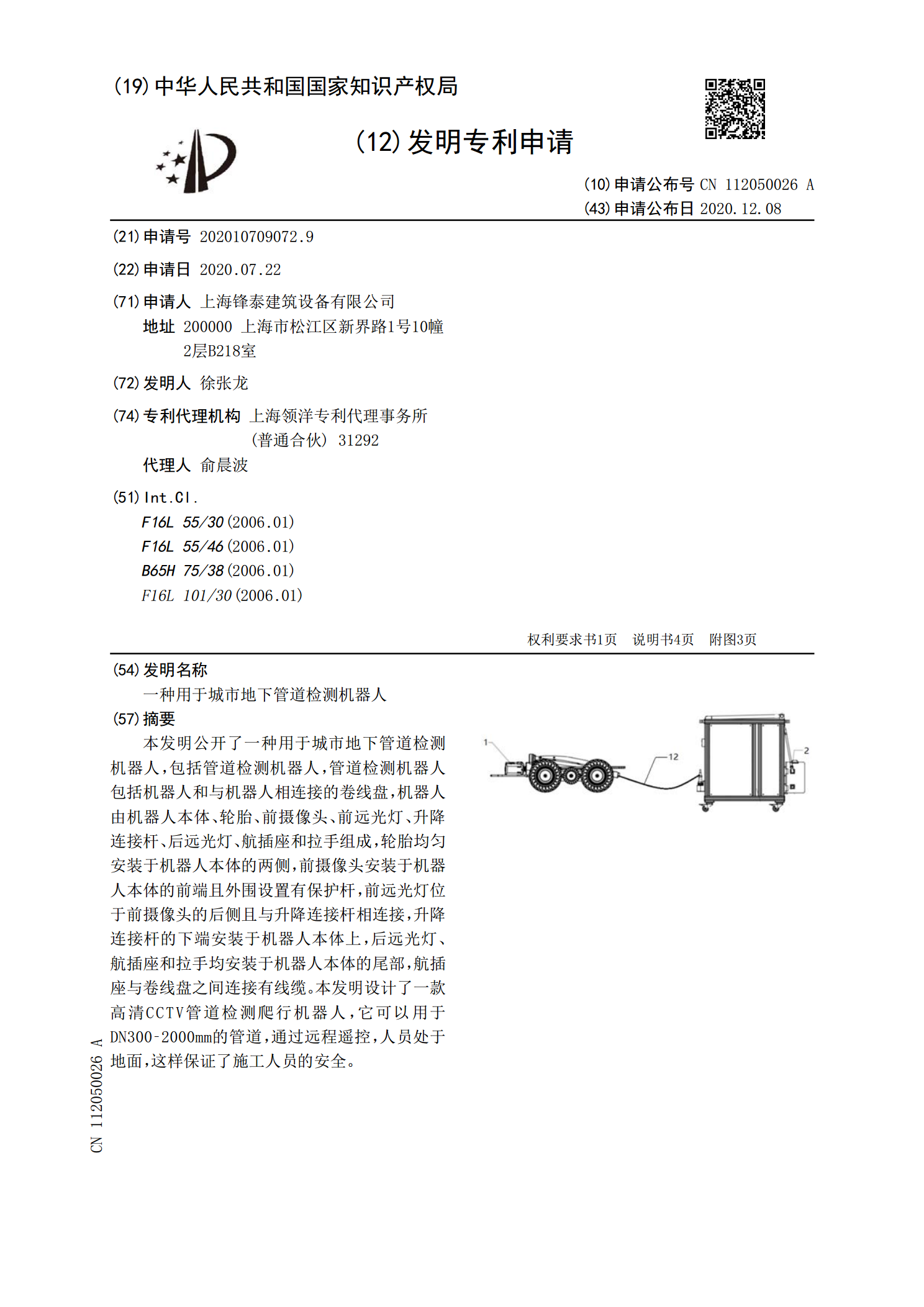
本发明公开了一种用于城市地下管道检测机器人,包括管道检测机器人,管道检测机器人包括机器人和与机器人相连接的卷线盘,机器人由机器人本体、轮胎、前摄像头、前远光灯、升降连接杆、后远光灯、航插座和拉手组成,轮胎均匀安装于机器人本体的两侧,前摄像头安装于机器人本体的前端且外围设置有保护杆,前远光灯位于前摄像头的后侧且与升降连接杆相连接,升降连接杆的下端安装于机器人本体上,后远光灯、航插座和拉手均安装于机器人本体的尾部,航插座与卷线盘之间连接有线缆。本发明设计了一款高清CCTV管道检测爬行机器人,它可以用于DN30
一种用于地下管道检测机器人的爬行装置.pdf
本发明涉及机器人载体领域,具体的说,是一种用于地下管道检测机器人的爬行装置,包括外壳,外壳内部设有驱动电机,所述驱动电机安装有主传动轴,主传动轴上设有齿轮,所述外壳任意一端安装有前置固定板,另一端安装有后置固定板,前置固定板和后置固定板通过转动轴分别安装有四个轮臂,轮臂上固定有滚轮,滚轮通过传动皮带与转动轴上的传动皮带齿轮连接;前置安装板和后置安装板上安装有副传动轴和轴承,副传动轴上设有齿轮,主转动轴的齿轮与副传动轴咬合,将动力分散给副传动轴,副传动轴连接轴承,轴承通过齿轮结构与转动轴连接,带动转动轴转动
一种用于爬杆检测机器人.pdf
本发明提供一种用于爬杆检测机器人,包括攀爬机构、上下夹持机构、清洗机构以及腰部回转机构在攀爬过程中,由下夹持机构夹紧杆体,同时上夹持机构松开,回转执行器工作,电机旋转,连杆伸长,推动清洗机构及上夹持机构上升,连杆伸至指定位置后,上夹持机构夹紧,下夹持机构放松,回转执行器工作,使连杆收缩,完成一次攀爬动作。在机器攀爬过程中,即执行器工作时,连杆伸长同时,腰部回转机构工作,齿轮转动使其与弧形导轨发生相对转动,带动清洗机构及上夹持器围绕杆体转动,完成一次腰部回转动作。
一种用于城市地下堵漏机器人.pdf
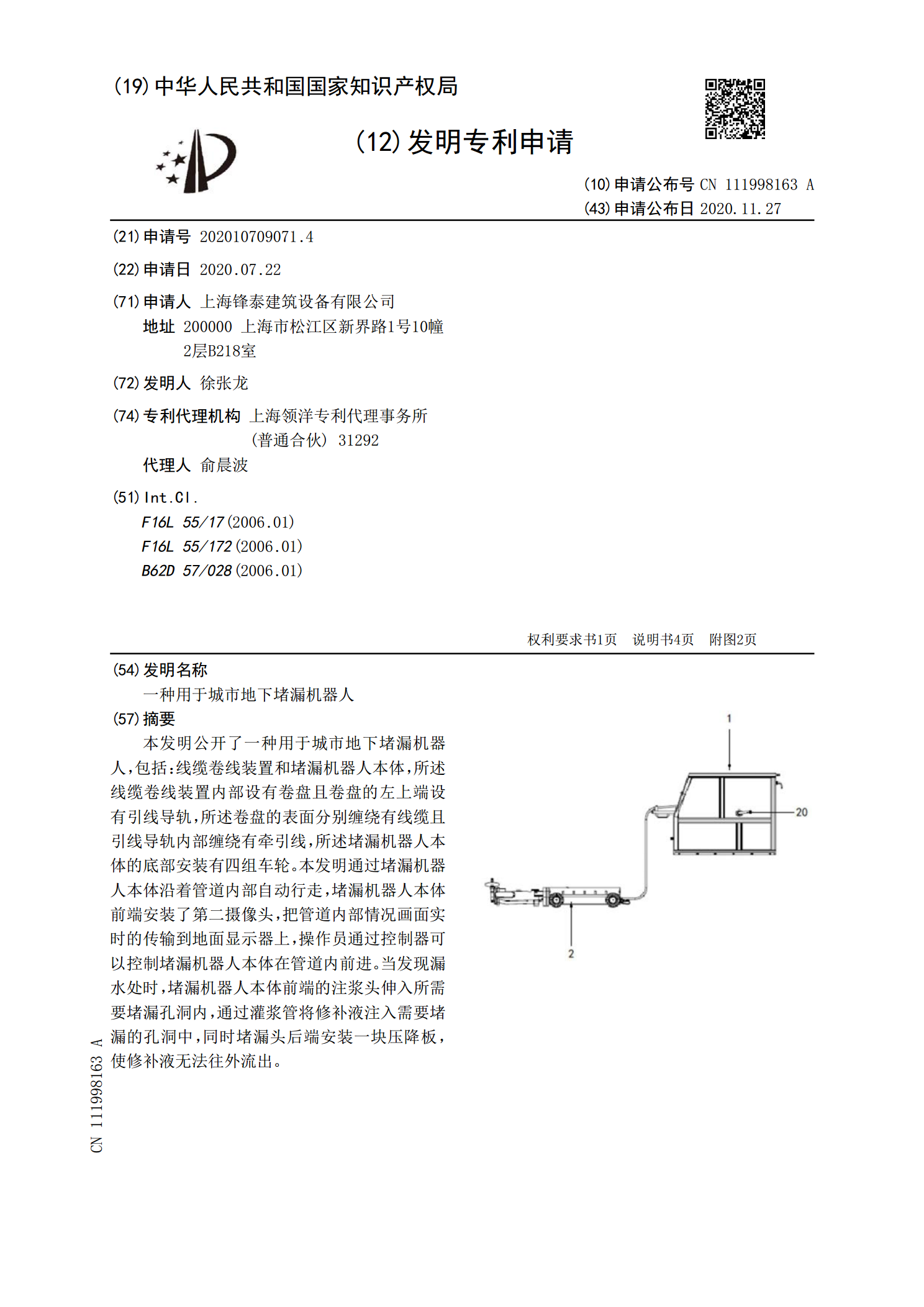
本发明公开了一种用于城市地下堵漏机器人,包括:线缆卷线装置和堵漏机器人本体,所述线缆卷线装置内部设有卷盘且卷盘的左上端设有引线导轨,所述卷盘的表面分别缠绕有线缆且引线导轨内部缠绕有牵引线,所述堵漏机器人本体的底部安装有四组车轮。本发明通过堵漏机器人本体沿着管道内部自动行走,堵漏机器人本体前端安装了第二摄像头,把管道内部情况画面实时的传输到地面显示器上,操作员通过控制器可以控制堵漏机器人本体在管道内前进。当发现漏水处时,堵漏机器人本体前端的注浆头伸入所需要堵漏孔洞内,通过灌浆管将修补液注入需要堵漏的孔洞中,
一种用于管道检测的攀爬机器人.pdf
本发明公开了一种用于管道检测的攀爬机器人,其结构包括安装支架、抱闸机构、摄像机、驱动盒、行走轮,驱动盒两侧安装有四个行走轮,驱动盒顶端面设有安装支架,安装支架和驱动盒通过螺铨锁定,安装支架上安装有摄像机,行走轮和驱动盒之间的驱动主轴上装设有摄像机,本发明通过抱闸机构,在所检测的管道内部泽进行转弯的时候,立即对支脚进行角度锁定,稳定支脚,防止发生触碰的问题,稳定拍摄的主体,本发明抱闸机构的动摩擦片上设有两个以上的凸起,与静摩擦片上相互配合,增加和驱动主轴接触摩擦系数,提高锁定的稳定性,抱闸稳定。