
具有伸缩摇臂悬架的无人车底盘结构.pdf

瀚玥****魔王


1/10

2/10

3/10

4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

具有伸缩摇臂悬架的无人车底盘结构.pdf
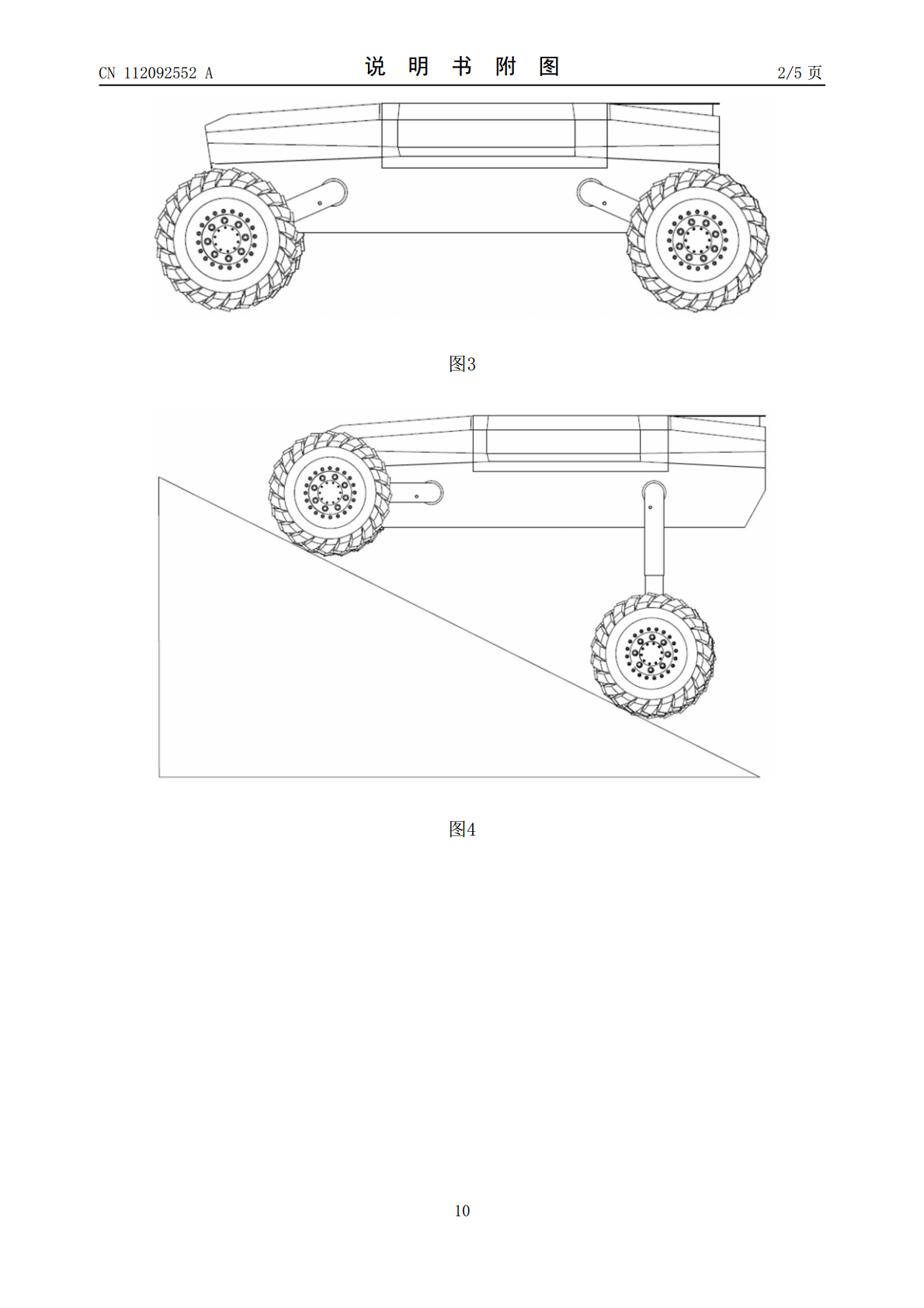
本发明属于无人车底盘技术领域,具体涉及一种具有伸缩摇臂悬架的无人车底盘结构。所述无人车底盘结构包括:车体以及四个悬架系统;所述四个悬架系统设置于车体的前、后、左、右的四个角处;所述四个悬架系统均包括:电动轮总成、轮边独立转向总成、伸缩摇臂总成、摇臂驱动与弹性阻尼系统总成;通过伸缩摇臂的大角度摆动和大行程伸缩,不仅可以调节车体的升降、俯仰和侧倾,还可以大大提高越壕越障的通过性,并增加爬坡稳定性和侧倾坡通过能力;结合轮边独立转向,还可以实现向心转向并满足合理的转向半径需求。
高速无人机动平台摇臂悬架系统.pdf
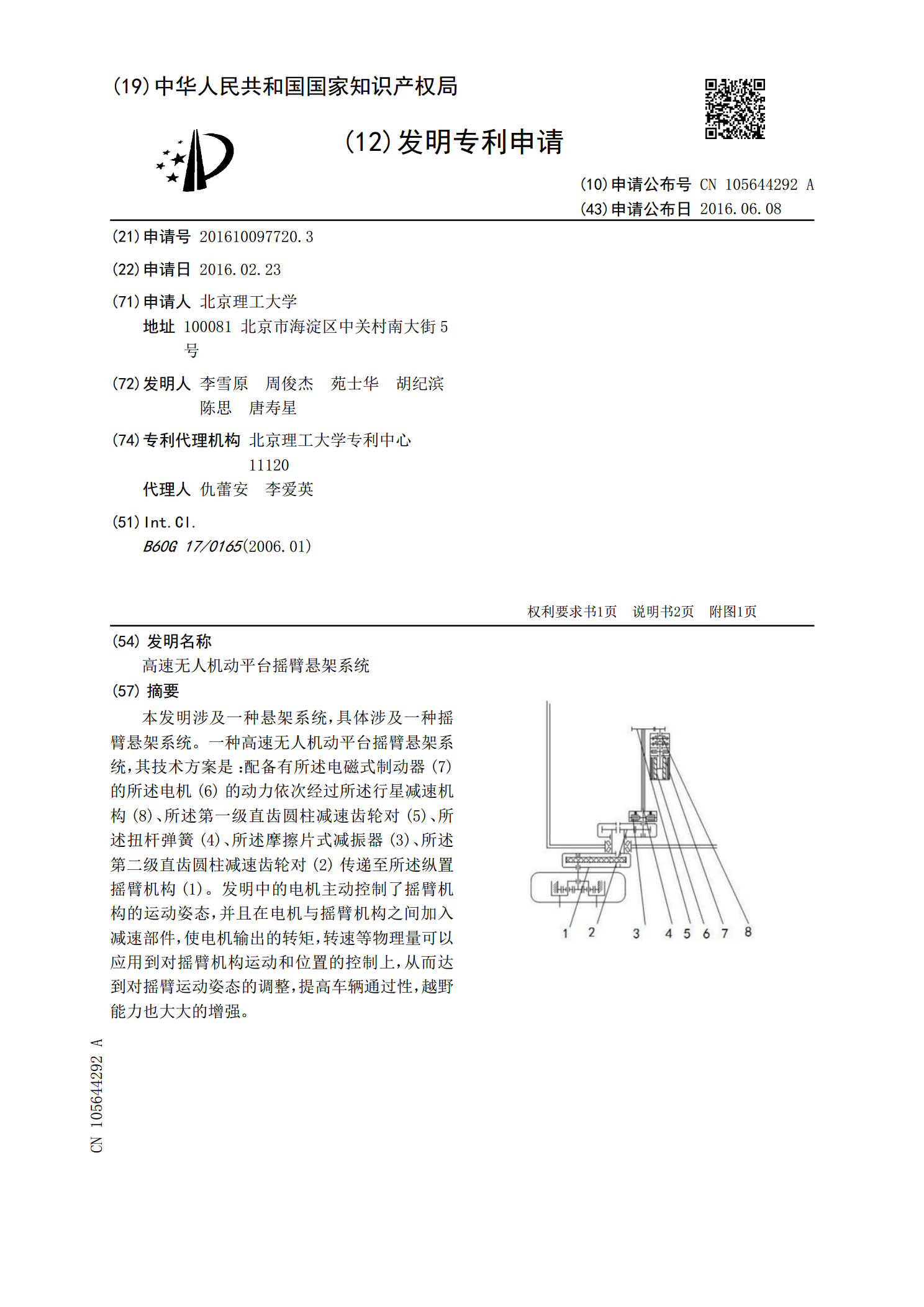
本发明涉及一种悬架系统,具体涉及一种摇臂悬架系统。一种高速无人机动平台摇臂悬架系统,其技术方案是:配备有所述电磁式制动器(7)的所述电机(6)的动力依次经过所述行星减速机构(8)、所述第一级直齿圆柱减速齿轮对(5)、所述扭杆弹簧(4)、所述摩擦片式减振器(3)、所述第二级直齿圆柱减速齿轮对(2)传递至所述纵置摇臂机构(1)。发明中的电机主动控制了摇臂机构的运动姿态,并且在电机与摇臂机构之间加入减速部件,使电机输出的转矩,转速等物理量可以应用到对摇臂机构运动和位置的控制上,从而达到对摇臂运动姿态的调整,提高
一种汽车底盘悬架车轮可伸缩调整U型支臂结构.pdf
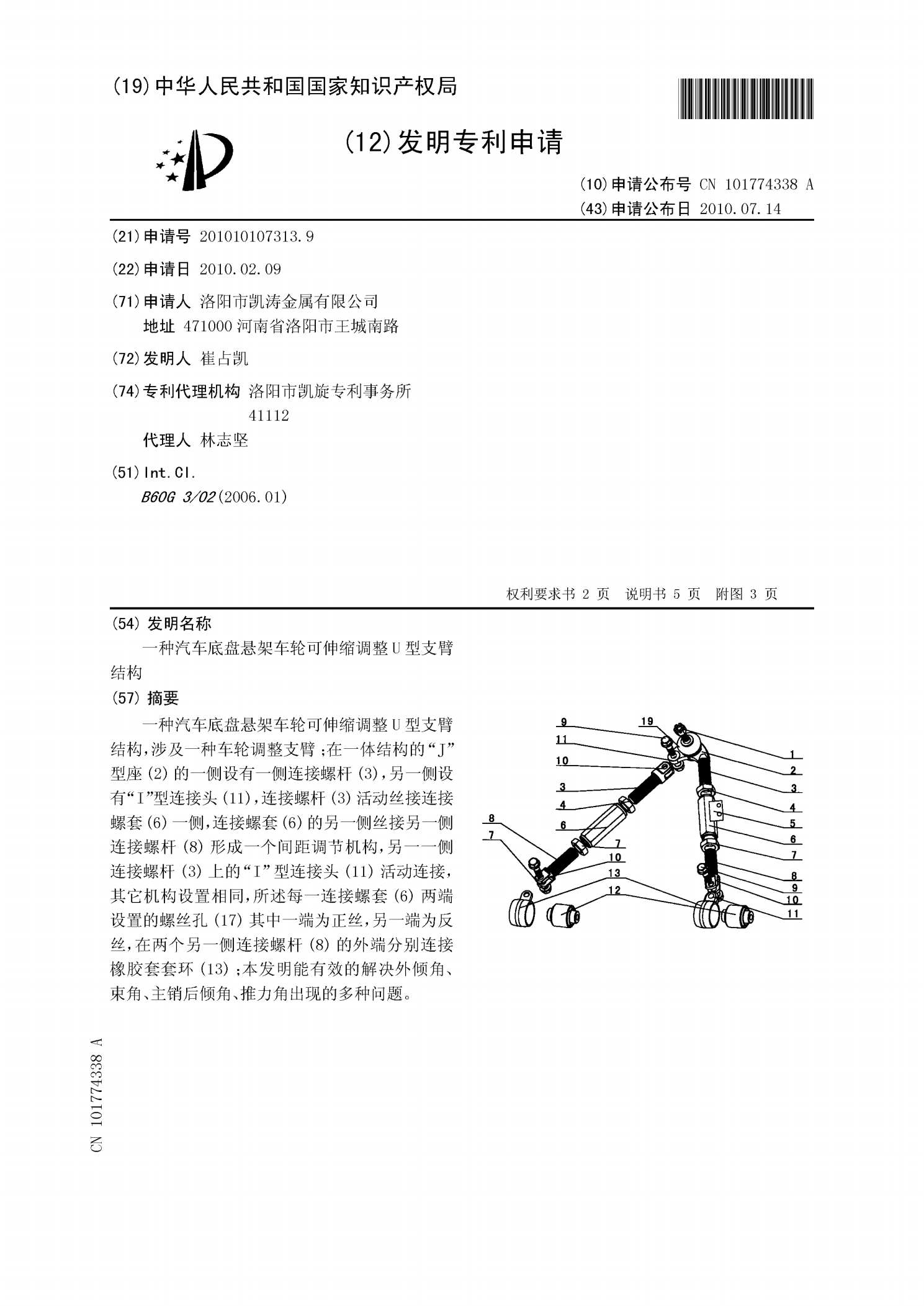
一种汽车底盘悬架车轮可伸缩调整U型支臂结构,涉及一种车轮调整支臂;在一体结构的“J”型座(2)的一侧设有一侧连接螺杆(3),另一侧设有“I”型连接头(11),连接螺杆(3)活动丝接连接螺套(6)一侧,连接螺套(6)的另一侧丝接另一侧连接螺杆(8)形成一个间距调节机构,另一一侧连接螺杆(3)上的“I”型连接头(11)活动连接,其它机构设置相同,所述每一连接螺套(6)两端设置的螺丝孔(17)其中一端为正丝,另一端为反丝,在两个另一侧连接螺杆(8)的外端分别连接橡胶套套环(13);本发明能有效的解决外倾角、束角
一种无人车底盘结构及无人车.pdf
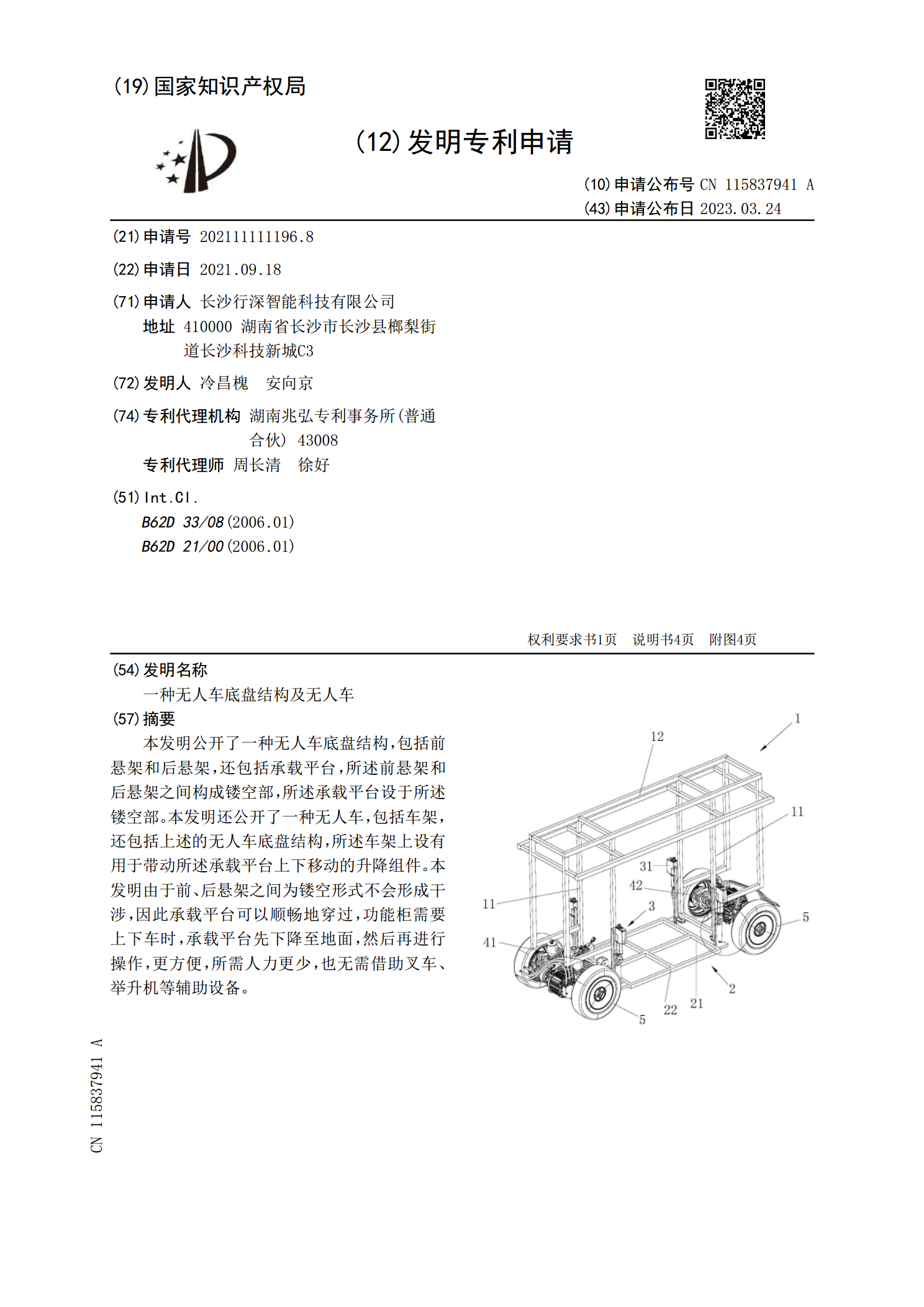
本发明公开了一种无人车底盘结构,包括前悬架和后悬架,还包括承载平台,所述前悬架和后悬架之间构成镂空部,所述承载平台设于所述镂空部。本发明还公开了一种无人车,包括车架,还包括上述的无人车底盘结构,所述车架上设有用于带动所述承载平台上下移动的升降组件。本发明由于前、后悬架之间为镂空形式不会形成干涉,因此承载平台可以顺畅地穿过,功能柜需要上下车时,承载平台先下降至地面,然后再进行操作,更方便,所需人力更少,也无需借助叉车、举升机等辅助设备。

一种汽车底盘悬架可伸缩调整支臂.pdf
一种汽车底盘悬架可伸缩调整支臂,可以很好地消除汽车的跑偏、发飘、侧滑、转向不稳、轮胎偏磨及悬挂系统零件磨损加剧等问题,进而提高车辆的操控性能及乘座的舒适性;由于采用可拆卸式组合结构,如果车辆调整后经过一段时间的行驶使车轮角度发生改变,只要在该组件的调整范围内,不需更换组件.调整至所需角度即可;它降低了维修人员的劳动强度及工作时间,同时也为顾客节约了维修费用,避免了资源的浪费;它的推广能降低维修车辆时等待备件的时间,并能大大降低维修成本。