
四轮驱动电动车辆的牵引控制装置和方法.pdf

冷霜****魔王

1/10

2/10
3/10

4/10
5/10

6/10

7/10

8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
四轮驱动电动车辆的牵引控制装置和方法.pdf
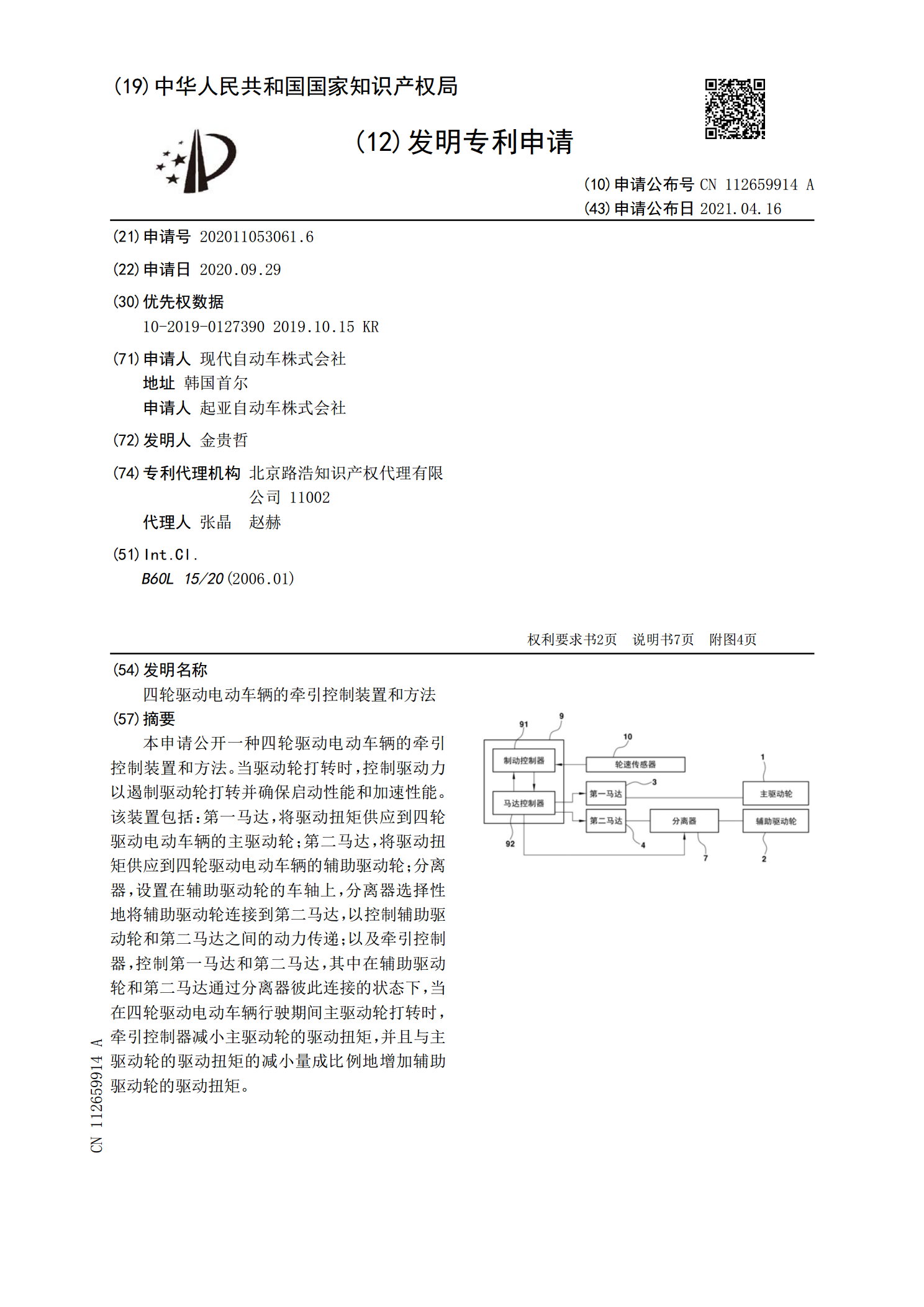
本申请公开一种四轮驱动电动车辆的牵引控制装置和方法。当驱动轮打转时,控制驱动力以遏制驱动轮打转并确保启动性能和加速性能。该装置包括:第一马达,将驱动扭矩供应到四轮驱动电动车辆的主驱动轮;第二马达,将驱动扭矩供应到四轮驱动电动车辆的辅助驱动轮;分离器,设置在辅助驱动轮的车轴上,分离器选择性地将辅助驱动轮连接到第二马达,以控制辅助驱动轮和第二马达之间的动力传递;以及牵引控制器,控制第一马达和第二马达,其中在辅助驱动轮和第二马达通过分离器彼此连接的状态下,当在四轮驱动电动车辆行驶期间主驱动轮打转时,牵引控制器减
电动四轮驱动车辆的控制方法以及电动四轮驱动车辆的控制装置.pdf
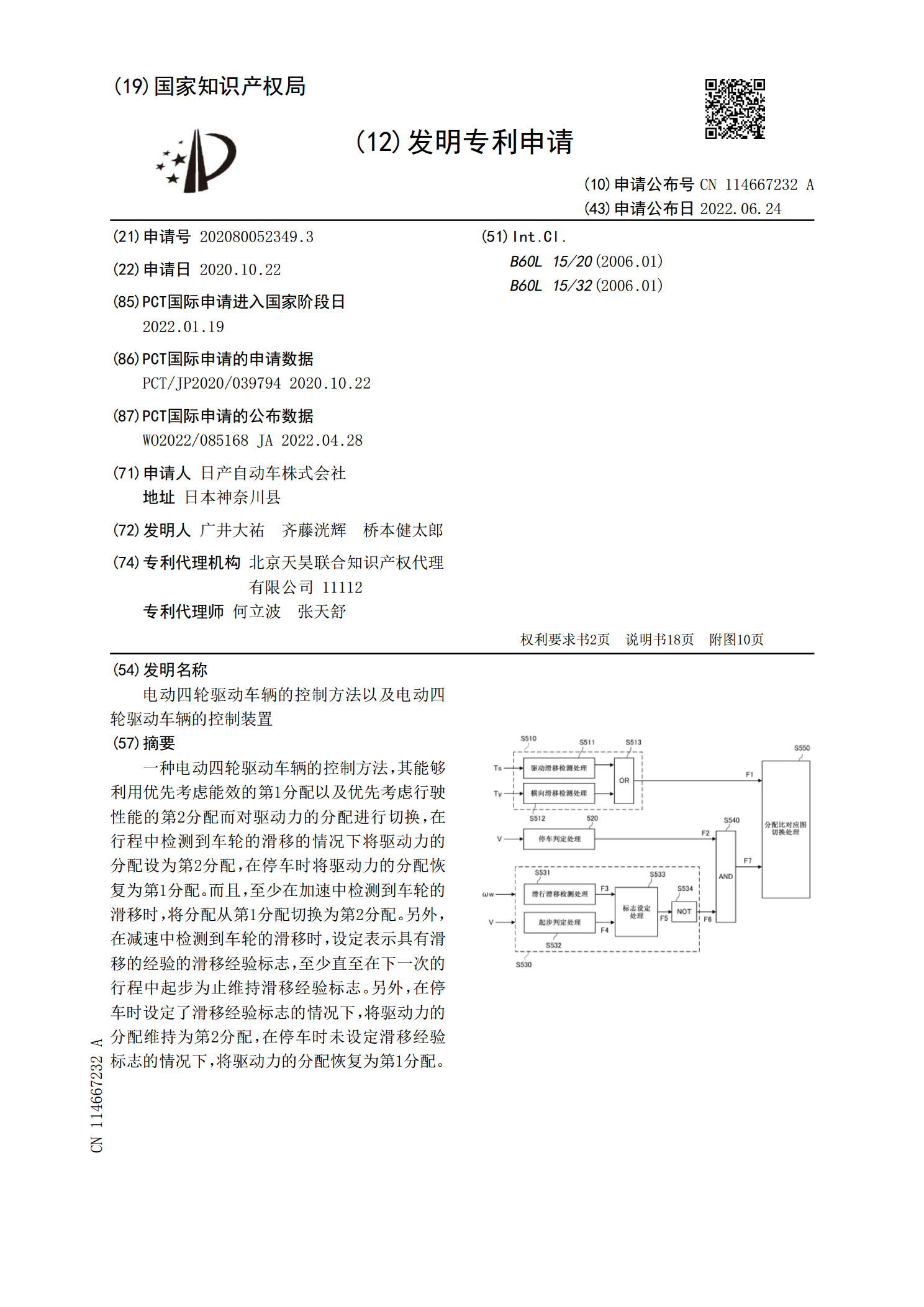
一种电动四轮驱动车辆的控制方法,其能够利用优先考虑能效的第1分配以及优先考虑行驶性能的第2分配而对驱动力的分配进行切换,在行程中检测到车轮的滑移的情况下将驱动力的分配设为第2分配,在停车时将驱动力的分配恢复为第1分配。而且,至少在加速中检测到车轮的滑移时,将分配从第1分配切换为第2分配。另外,在减速中检测到车轮的滑移时,设定表示具有滑移的经验的滑移经验标志,至少直至在下一次的行程中起步为止维持滑移经验标志。另外,在停车时设定了滑移经验标志的情况下,将驱动力的分配维持为第2分配,在停车时未设定滑移经验标志的

车辆用牵引控制装置和具备该装置的车辆及牵引控制方法.pdf
本发明涉及车辆用牵引控制装置和具备该装置的车辆及牵引控制方法。本发明车辆用牵引控制装置(18),检测相应于驱动轮(3)的打滑程度而变化的监视值(M),判定监视值(M)是否满足开始条件和解除条件,在判定为满足开始条件起到判定为满足解除条件为止的时间,执行使驱动轮(3)的驱动力减少的牵引控制。至少开始条件根据相应于车辆状态变动的打滑判断因子可变地设定,将开始条件设定为与解除条件相比随车辆状态而变化更大。

四轮驱动电动车辆的控制装置.pdf
防止在四轮驱动状态时因再生控制介入而产生震动。在驱动源中具有电动发电机(4),在从驱动源向前后轮的驱动力传递路径中设置有电子控制耦合器(42)。在该FF型的四轮驱动混合动力车辆中,具备向电子控制耦合器(42)输出根据车辆状态设为四轮驱动状态的传递扭矩指令值的4WD控制部件(85)。4WD控制部件(85)具有再生控制介入协调控制部,在四轮驱动状态下电动发电机(4)的再生控制介入时,该再生控制介入协调控制部在再生控制开始之前使电子控制耦合器(42)的传递扭矩为零。

用于车辆的牵引控制方法和装置.pdf
本发明涉及一种用于车辆的牵引控制方法,其中,该车辆的车轮的实际滑动是可获得的,其中,借助于自适应过滤器从实际滑动自适应地确定过滤的实际滑动,其中,过滤的实际滑动被传递至控制器,其中,根据过滤的实际滑动和目标滑动借助于该控制器设置该发动机扭矩。本发明还涉及一种相关联的装置。