
一种头戴式眼电操控的智能轮椅及其控制方法.pdf

是你****盟主


1/10
2/10
3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种头戴式眼电操控的智能轮椅及其控制方法.pdf
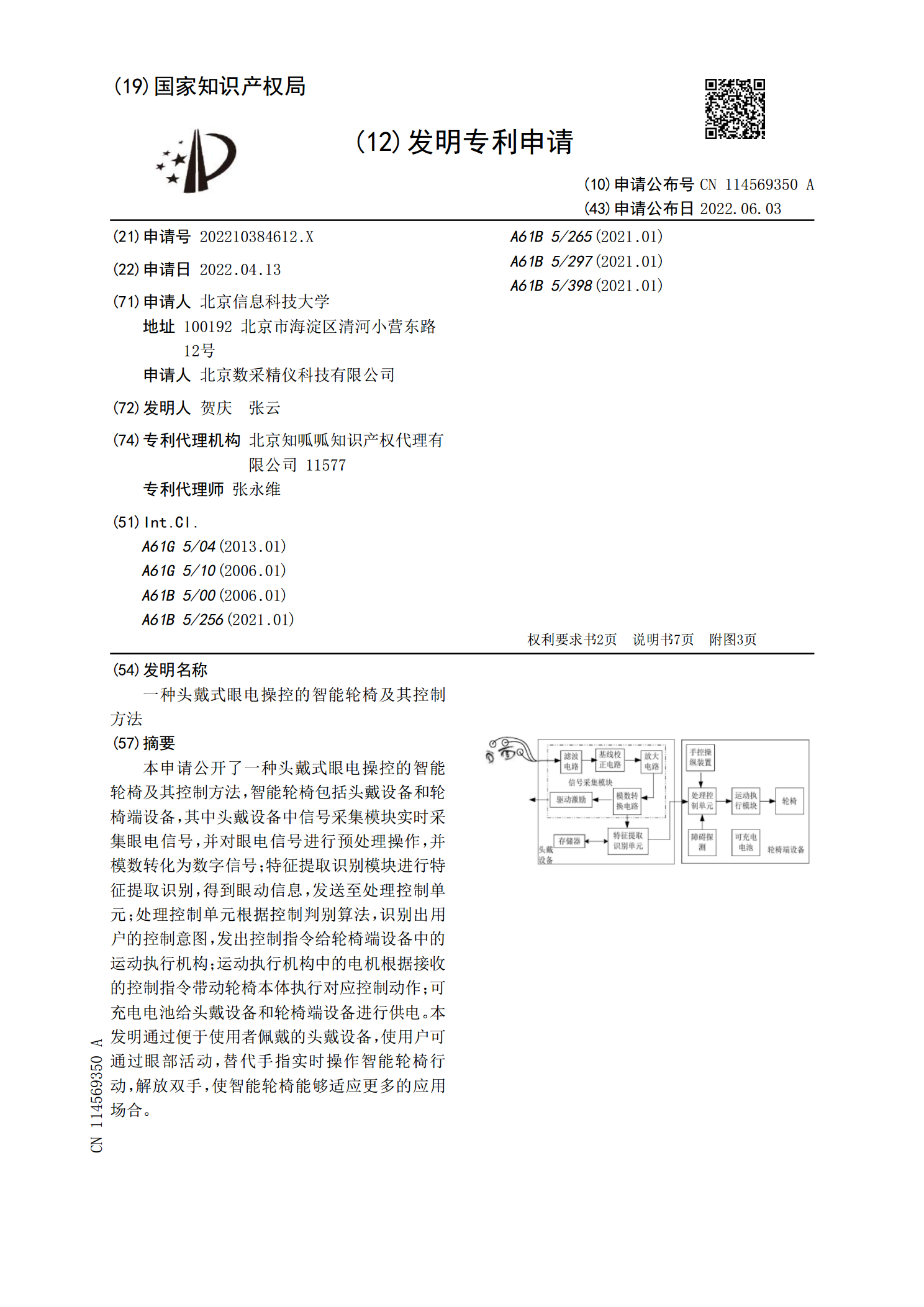
本申请公开了一种头戴式眼电操控的智能轮椅及其控制方法,智能轮椅包括头戴设备和轮椅端设备,其中头戴设备中信号采集模块实时采集眼电信号,并对眼电信号进行预处理操作,并模数转化为数字信号;特征提取识别模块进行特征提取识别,得到眼动信息,发送至处理控制单元;处理控制单元根据控制判别算法,识别出用户的控制意图,发出控制指令给轮椅端设备中的运动执行机构;运动执行机构中的电机根据接收的控制指令带动轮椅本体执行对应控制动作;可充电电池给头戴设备和轮椅端设备进行供电。本发明通过便于使用者佩戴的头戴设备,使用户可通过眼部活动

智能感知轮椅的操控系统及智能轮椅的控制方法.pdf
智能感知轮椅的操控系统及智能轮椅的控制方法,涉及医疗机械领域,用于解决对轮椅自身信息的采集及控制问题,要点是包括操控器,所述操控器与计算机处理单元相接,所述计算机处理单元包括传感器模块、驱动模块和人机交互模块,所述传感器模块包括内部状态感知模块和外部环境状态感知模块,所述内部状态感知模块通过姿态传感器确定轮椅使用者的姿态信息,所述外部环境状态感知模块分别通过编码器的位移速度和距离获得自定位信息,效果是通过感知模块可以检测到轮椅上使用者的信息和外部环境的信息,进而便于轮椅自行判断前行路线,防止发生碰撞,利于
一种智能轮椅及其控制方法.pdf
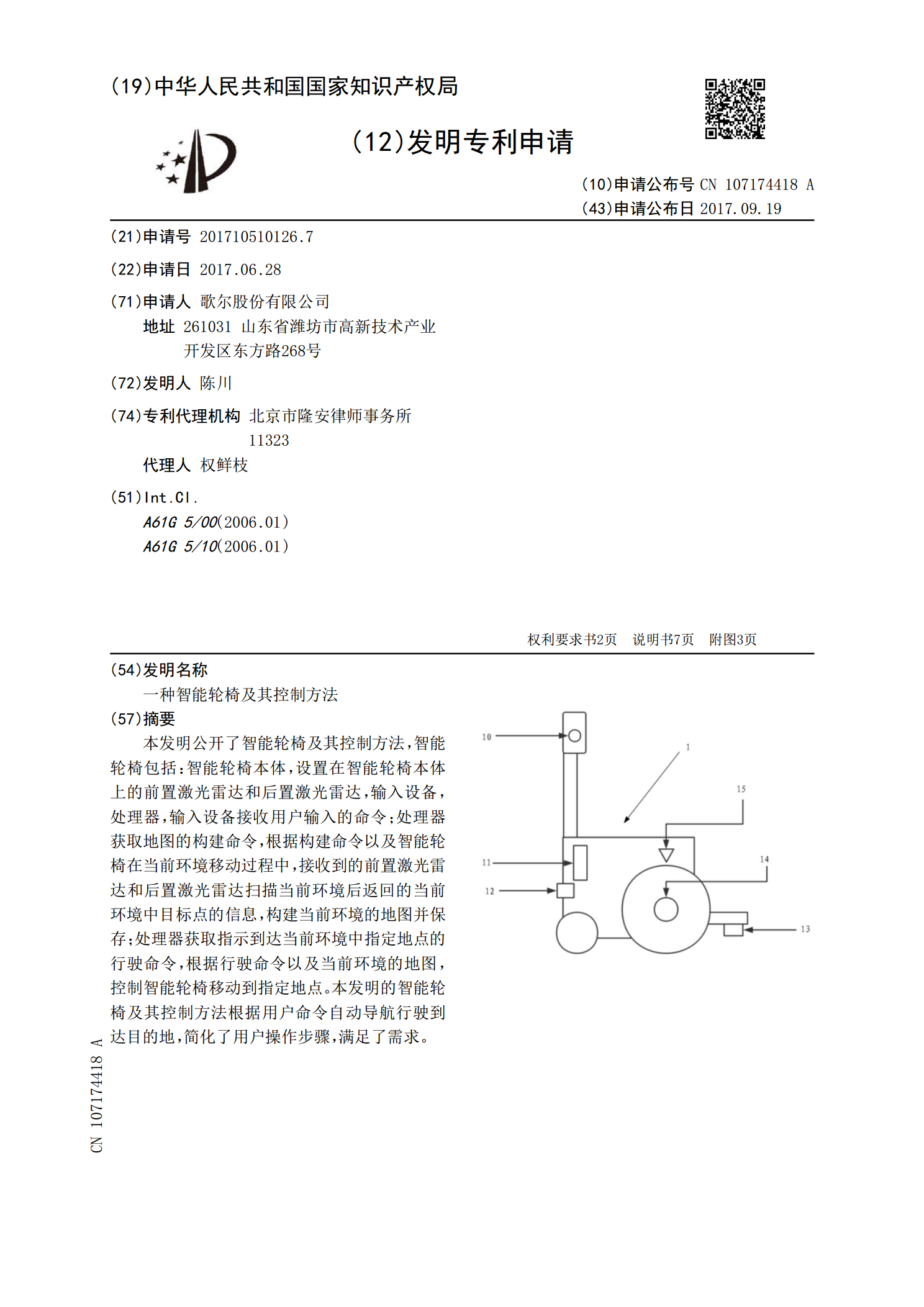
本发明公开了智能轮椅及其控制方法,智能轮椅包括:智能轮椅本体,设置在智能轮椅本体上的前置激光雷达和后置激光雷达,输入设备,处理器,输入设备接收用户输入的命令;处理器获取地图的构建命令,根据构建命令以及智能轮椅在当前环境移动过程中,接收到的前置激光雷达和后置激光雷达扫描当前环境后返回的当前环境中目标点的信息,构建当前环境的地图并保存;处理器获取指示到达当前环境中指定地点的行驶命令,根据行驶命令以及当前环境的地图,控制智能轮椅移动到指定地点。本发明的智能轮椅及其控制方法根据用户命令自动导航行驶到达目的地,简化

介入式主动操控智能轮椅的控制系统及方法.pdf
本发明提供一种介入式主动操控智能轮椅的控制系统和方法,包括数据采集模块,采集轮椅的椅面和脚踏的压力,以及轮椅的运行加速度;唤醒模块根据采集到的椅面的压力,在轮椅有人时解除锁定;状态判断模块根据轮椅的加速度,判断轮椅是否处于行驶状态;坐姿提醒模块用于在行驶状态下保持在不良坐姿的时间超时则发出报警并发送减速信号;脚踏提醒模块用于在行驶状态下当脚不当放置或者离开脚踏时间超时则发出报警并发送减速信号;减速控制模块用于控制轮椅的两个电机接口,将行驶速度降低到安全速度以内,并解除报警状态。本发明实现对轮椅使用者坐姿状
智能轮椅及其转向控制方法.pdf
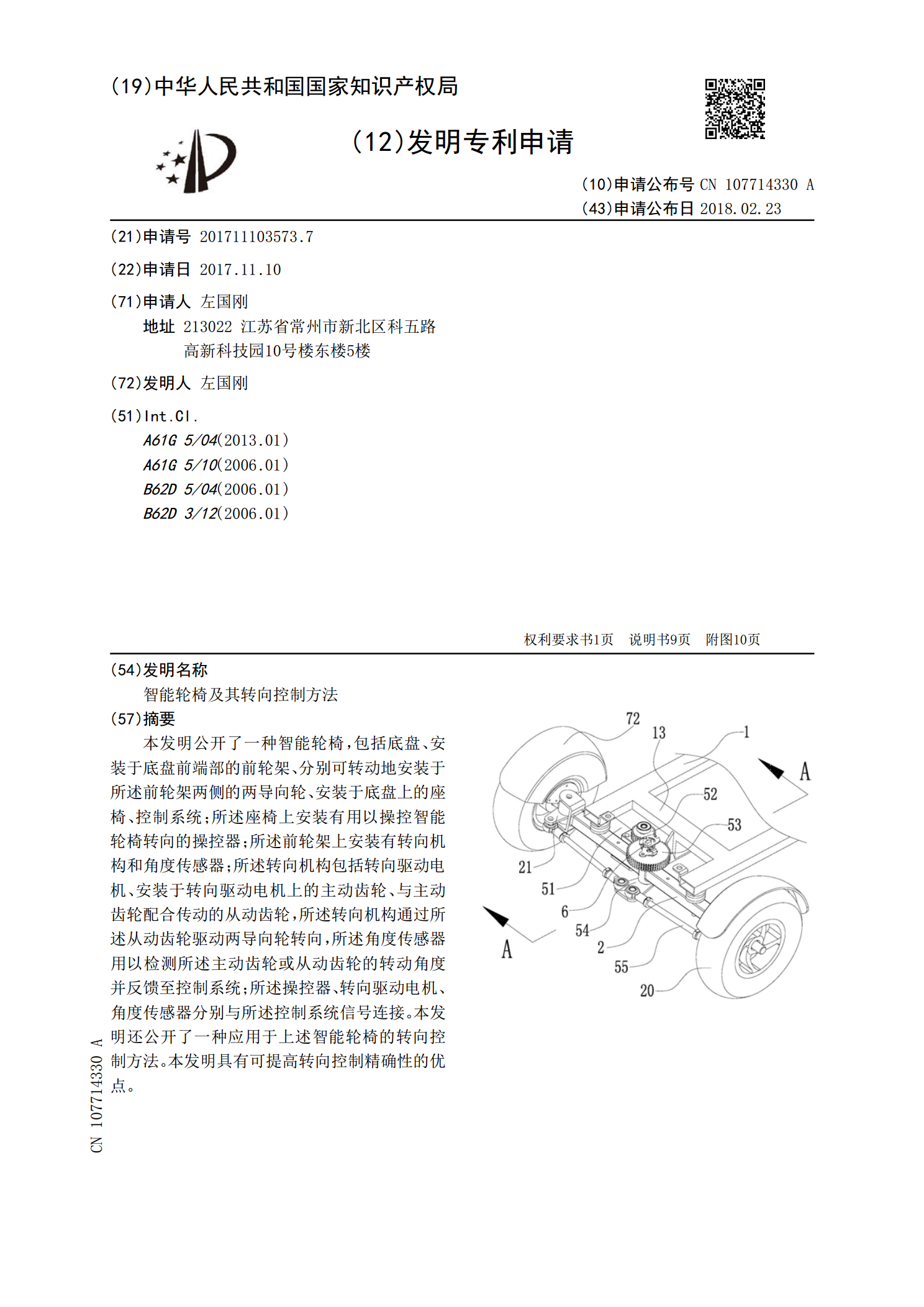
本发明公开了一种智能轮椅,包括底盘、安装于底盘前端部的前轮架、分别可转动地安装于所述前轮架两侧的两导向轮、安装于底盘上的座椅、控制系统;所述座椅上安装有用以操控智能轮椅转向的操控器;所述前轮架上安装有转向机构和角度传感器;所述转向机构包括转向驱动电机、安装于转向驱动电机上的主动齿轮、与主动齿轮配合传动的从动齿轮,所述转向机构通过所述从动齿轮驱动两导向轮转向,所述角度传感器用以检测所述主动齿轮或从动齿轮的转动角度并反馈至控制系统;所述操控器、转向驱动电机、角度传感器分别与所述控制系统信号连接。本发明还公开了